引言
泡泡龍游戲的核心玩法依賴于物理碰撞與顏色匹配的算法實現。反彈效果需要模擬泡泡與邊界或障礙物的彈性碰撞,確保軌跡符合物理規律;匹配算法則需快速檢測相鄰同色泡泡,觸發消除邏輯。高效的處理方式直接影響游戲流暢度和玩家體驗。
以下主要介紹反彈與匹配算法的多種實現思路和代碼示例。
一、 反彈物理計算
- 幾何變換法 Canvas/CSS 對稱反射,無需手動計算角度,適用于垂直邊界的反彈,屬于鏡像反射 的簡化實現
(1)入射角度
計算鼠標相對與射擊器中心的角度
//得到一個從射擊器中心指向鼠標位置的角度值(單位:角度)
let iAngle = Math.abs((Math.atan2(ey - oy, ex - ox) * 180) / PI);
iAngle = Math.min(170, Math.max(10, iAngle)); //限制射擊角度在 10° ~ 170° 范圍內
iAngle = -angleToRadian(iAngle); //將角度轉換回弧度,并反向處理
//補充工具函數
const normalizeAngle = (angle: number) => {// 角度可能超出 [0°, 360°),先歸一化:return ((angle % 360) + 360) % 360;
}const radianTOAngle = (radian: number) => {return radian * 180 / Math.PI;
}const angleToRadian = (angle: number) => {return angle * Math.PI / 180;
}
(2)反射角度
左右反彈通過x軸方向,左邊界反彈法線是x軸正方向,反射角度=-π -入射角度
右邊界法線是x軸負方向,反射角度= π -入射角度
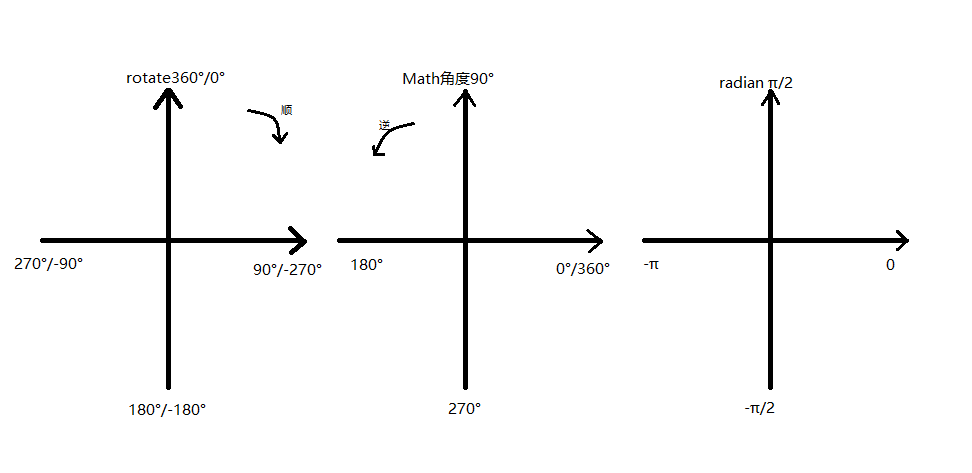
前端角度轉換成數學角度,前端(CSS/Canvas)的旋轉角度和數學計算角度差異(如下圖),前端需要順時針轉90,方向從順時轉成逆時針取反,就得到90-前端角度=數學角度
網上還有另外一種思路,垂直反射改變水平移動速度
shooterBubble.dx表示泡泡水平移動速度 shooterBubble.dx = -shooterBubble.dx; 實現水平方向反彈, 鏡像反射 的簡化方式,適用于垂直邊界, 若原方向為 30°,碰到右邊界后變為 150°(即對稱角度),實際上沒有計算角度,只是改變 x 軸方向。
- 向量計算法 通用 2D/3D 反射 精確,適用于任意方向
(1)概念
利用向量的點積(dot product)和叉積(cross product)計算角度,適用于任意方向的入射角計算。
點積(內積)返回一個標量(數值),用于計算夾角、投影、相似度(光照、碰撞檢測)。
叉積(外積)返回一個向量(在 3D 中),用于計算垂直方向、旋轉方向、面積(法線、扭矩、幾何判斷)。
點積定義為 a?b=∣a∣?∣b∣?cosθ, ∣a∣ 和 ∣b∣ 是向量的模, θ 是兩向量之間的夾角
在 2D 和 3D 中,點積的計算公式為:
(2D)a?b=ax bx +ay by (2D)
(3D)a?b=ax bx +ay by +az bz (3D)
function dotProduct(a, b) {return a.x * b.x + a.y * b.y; // 2D
}const a = { x: 1, y: 0 }; // 向右
const b = { x: 0, y: 1 }; // 向上const dot = dotProduct(a, b); // 0(垂直)
const angle = Math.acos(dot / (Math.hypot(a.x, a.y) * Math.hypot(b.x, b.y))); // 90°(2)計算入射向量和法線向量:
入射向量 v1 = (x1, y1)
表面法線向量 n = (nx, ny)(垂直于反射面)
(3)計算反射向量(根據反射定律):反射向量=v1?2×(v1?n)×n(其中 · 是點積)
(4)計算角度:
用 Math.atan2 計算反射向量與水平軸的夾角:Math.atan2(reflectedY, reflectedX)(這里需要注意在數學計算中使用的是弧度值)
function calculateReflectionAngle(incidentVec, normalVec) {const dot = incidentVec.x * normalVec.x + incidentVec.y * normalVec.y;const reflectedX = incidentVec.x - 2 * dot * normalVec.x;const reflectedY = incidentVec.y - 2 * dot * normalVec.y;return Math.atan2(reflectedY, reflectedX); // 返回弧度
}
復習三角函數
a 表示 “arc”(弧),即通過比值反推角度
| 函數 | 含義 | 范圍 | 場景 |
|---|---|---|---|
| Math.sin(x) | 正弦 (對邊/斜邊) | [-1, 1] | 周期性運動、旋轉計算、波形生成 |
| Math.cos(x) | 余弦 (鄰邊/斜邊) | [-1, 1] | 周期性運動、旋轉計算、波形生成 |
| Math.tan(x) | 正切 (對邊/鄰邊) | (-∞, ∞) | 斜率計算、視角映射、透視校正 |
| Math.asin(x) | 反正弦 | [-π/2, π/2] | 角度反推、碰撞檢測 |
| Math.acos(x) | 反余弦 | [0, π] | 角度反推、碰撞檢測 |
| Math.atan(x) | 反正切 | [-π/2, π/2] | 簡單斜率計算 |
| Math.atan2(x) | 帶象限的反正切 | [-π, π] | 精準角度計算(自動處理象限) |
二、 迭代BFS算法
- 概念
BFS(Breadth-First Search 廣度優先搜索)是一種圖遍歷算法,它從根節點開始,先訪問所有相鄰節點,然后再依次訪問這些相鄰節點的相鄰節點,以此類推,逐層擴展。
- 核心思路
隊列數據結構:使用隊列來存儲待訪問的節點(下面代碼中queue)
層級遍歷:按照距離起始節點的層級順序訪問
避免重復訪問:使用標記數組或哈希表記錄已訪問節點(下面代碼中visited)
- 獲取六邊形相鄰布局節點
從左上開始按順時針方向進行遍歷,不要忘記進行邊界檢查
getNeighborsTiles(newPao: Tile): Tile[] {// 定義6個相鄰方向(六邊形網格)// 順序:左上、右上、右、右下、左下、左const isEvenRow = (newPao.x % 2 === 0);const directions = [{ dx: -1, dy: isEvenRow ? -1 : 0, info: '左上' },{ dx: -1, dy: isEvenRow ? 0 : 1, info: '右上' },{ dx: 0, dy: 1, info: '右' },{ dx: 1, dy: isEvenRow ? 0 : 1, info: '右下' },{ dx: 1, dy: isEvenRow ? -1 : 0, info: '左下' },{ dx: 0, dy: -1, info: '左' }];const neighbors = [];// 按順時針方向遞歸檢查相鄰泡泡for (const dir of directions) {const nx = newPao.x + dir.dx;const ny = newPao.y + dir.dy;// 邊界檢查if (nx < 0 || nx >= this.maxRow ||ny < 0 || ny >= (nx % 2 === 0 ? this.maxCol : this.maxCol - 1)) {continue;}const pao = this.grid.cells?.[nx]?.[ny];// console.log(`${nx}-${ny}-${dir.info}`, pao);if (pao) neighbors.push(pao)}return neighbors}
- 查找所有相鄰的同色泡泡,返回需要消除的泡泡
查找過程:以當前停靠的泡泡為起點,查看周圍所有與它相鄰的泡泡,如果發現周圍有相同顏色(數字相同)的泡泡,那么就以這個泡泡為起點,繼續查看其周圍相鄰的泡泡…一直重復這個過程,直到周圍不再有相鄰的泡泡為止。時間和空間復雜度O(N)。
searchRemovePaos(newPao: Tile): Tile[] {// 記錄所有相鄰的泡泡,六邊形布局以左上角泡泡為開始,順時針進行查找相鄰的泡泡const visited: Set<string> = new Set();//已訪問集合,避免重復查找;const queue: Tile[] = [newPao]; //BFS 隊列用于廣度優先查找;const removePaos: Tile[] = [];// 存放最終要消除的泡泡;// 起始泡泡先加入visited.add(`${newPao.x},${newPao.y}`);removePaos.push(newPao);while (queue.length > 0) {const current = queue.pop();console.log('查找current', current);if (!current) continue;const neighbors = this.getNeighborsTiles(current);for (const neighbor of neighbors) {const key = `${neighbor.x},${neighbor.y}`;if (visited.has(key)) continue; // 已經查過,跳過visited.add(key); // 標記為已訪問if (neighbor.color === current.color) {removePaos.push(neighbor); // 同色泡泡加入消除列表queue.push(neighbor); // 并繼續擴散查找}}}return removePaos.length >= 3 ? removePaos : [];}
- 懸浮泡泡消除
使用BFS 遍歷查找所有與頂部相連的泡泡,再次遍歷整個網格,找出所有 未與頂部相連的泡泡(懸空泡泡),并返回它們,時間和空間復雜度O(M × N)
searchDropPaos() {const visited: Set<string> = new Set();//用于記錄已經訪問過的泡泡const connectedToTop: Set<string> = new Set();// 存儲和頂部相連的泡泡const queue: Tile[] = [];// BFS 隊列// 初始化隊列,將頂部的泡泡加入for (let y = 0; y < (0 % 2 === 0 ? this.maxCol : this.maxCol - 1); y++) {const topPao = this.grid.cells[0][y];if (topPao) {const key = `${0},${y}`;queue.push(topPao);visited.add(key);connectedToTop.add(key);}}// BFS 遍歷查找所有與頂部相連的泡泡:while (queue.length > 0) {const current = queue.shift();if (!current) continue;const neighbors = this.getNeighborsTiles(current);for (const neighbor of neighbors) {const key = `${neighbor.x},${neighbor.y}`;if (visited.has(key)) continue;visited.add(key);connectedToTop.add(key);queue.push(neighbor);}}// 只能從頂部出發,找到所有直接或間接與頂部相連的泡泡。但無法直接標記出 未與頂部相連 的泡泡// 需再次遍歷整個網格,找出所有未和頂部相連的泡泡const dropPaos: Tile[] = [];for (let x = 0; x < this.boxRow; x++) {const maxColInRow = x % 2 === 0 ? this.maxCol : this.maxCol - 1;for (let y = 0; y < maxColInRow; y++) {const pao = this.grid.cells?.[x]?.[y];if (pao) {const key = `${x},${y}`;if (!connectedToTop.has(key)) {dropPaos.push(pao);}}}}return dropPaos;}
擴展
另一種圖遍歷算法 DFS(Depth-First Search 深度優先搜索),它沿著一條路徑盡可能深入地搜索,直到無法繼續前進,然后回溯并嘗試其他路徑。
- 核心思路
棧數據結構:使用棧(遞歸調用棧或顯式棧)來存儲待訪問節點
深度優先:盡可能深地探索一條路徑
回溯機制:當無法繼續前進時返回上一個分叉點
- 遞歸DFS(隱式棧)
優點:①數據規模小(如二叉樹深度<1000)②代碼簡潔性優先
缺陷:①棧溢出風險:深度過大時(如1萬+層)會觸發Maximum call stack size exceeded ②函數調用比循環消耗更多資源
// 遞歸DFS(鄰接鏈表表示)
function dfsRecursive(graph, node, visited = new Set()) {console.log(node); // 訪問節點visited.add(node);for (const neighbor of graph[node]) {if (!visited.has(neighbor)) {dfsRecursive(graph, neighbor, visited); // 遞歸調用, 這行是隱式使用調用棧(Call Stack)保存狀態 visited}}
}// 使用示例
const graph2 = {'A': ['B', 'C'],'B': ['D'],'C': ['E'],'D': [],'E': []
};
dfsRecursive(graph2, 'A'); // 輸出: A → B → D → C → E
- 迭代DFS(顯式棧)
優點:①避免棧溢出:棧大小由堆內存控制,可處理超深結構 ②性能更好:減少函數調用開銷 ③靈活控制:可隨時暫停/恢復遍歷
缺點:代碼可讀性低需手動管理狀態(循環推薦手動管理stack和visited )
// 迭代DFS(顯式棧)顯式使用棧結構(數組)代替調用棧
function dfsIterative(graph, start) {const stack = [start]; // 顯式棧,模擬調用棧無深度限制(受限于堆內存而非調用棧),通過push/pop操作實現棧操作const visited = new Set();// 減少函數調用開銷,可隨時暫停/恢復遍歷,更靈活while (stack.length > 0) {const node = stack.pop(); // 取棧頂if (visited.has(node)) continue;console.log(node); // 訪問節點visited.add(node); // 通過循環推進// 逆序壓棧保證遍歷順序(與遞歸一致)for (let i = graph[node].length - 1; i >= 0; i--) {stack.push(graph[node][i]);}}
}// 使用相同的graph
dfsIterative(graph2, 'A'); // 輸出: A → C → E → B → D
| 特性 | BFS | DFS |
|---|---|---|
| 數據結構 | 隊列 | 棧(遞歸或顯式) |
| 空間復雜度 | O(V)(最寬層級) | O(V)(最長路徑) |
| 最短路徑 | 可以找到(無權圖) | 不一定能找到 |
| 實現方式 | 通常迭代實現 | 遞歸或迭代實現 |
| 適用場景 | 最短路徑、層級關系 | 拓撲排序、連通性檢測 |
總結
泡泡反彈使用Math.atan2(mouseY - SHOOTER_Y, mouseX - SHOOTER_X)計算鼠標相對于炮臺的發射角度,簡單的垂直方向反射可以直接用 PI 去計算,其他方向反射用向量計算法更準確。泡泡消除查詢匹配使用BFS,BFS 適合從頂部逐層向下擴展,天然符合“與頂部連接”的邏輯。更容易控制邊界條件:BFS 按層處理,適合六邊形網格這種結構較復雜的布局。DFS 不利于全局連通性判斷:DFS 更適合路徑探索或圖的連通性判定,但在這種網格結構中,BFS 更直觀、更高效。
參考資料
- 【泡泡龍游戲】泡泡如何發射,反彈,移動,停靠
- 【泡泡龍游戲】核心查找匹配算法


)
![[論文閱讀]TrustRAG: Enhancing Robustness and Trustworthiness in RAG](http://pic.xiahunao.cn/[論文閱讀]TrustRAG: Enhancing Robustness and Trustworthiness in RAG)







)
![[Java惡補day22] 240. 搜索二維矩陣Ⅱ](http://pic.xiahunao.cn/[Java惡補day22] 240. 搜索二維矩陣Ⅱ)




: K8s 從零到一:使用 Minikube/kind 在本地搭建你的第一個 K8s 集群)

