一.錨框(anchor box)概述
1.1什么是錨框
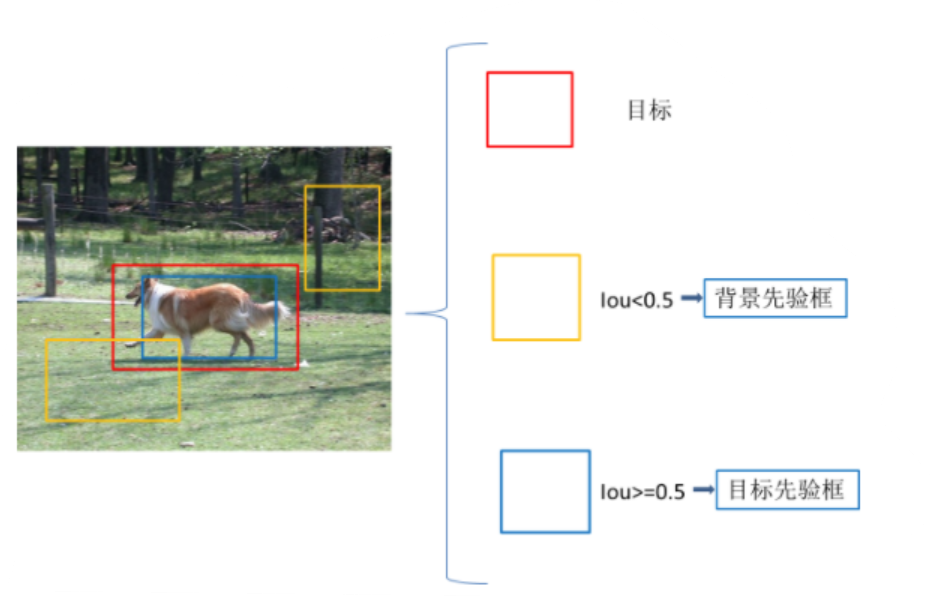
錨框就是一種進行預測的像素框,通過遍歷輸入圖像上所有可能的像素框,然后選出正確的目標框,并對位置和大小進行調整就可以完成目標檢測任務。
對于yolo錨框的建設須基于實際的考量,不可能按照圖片輸入448x448的規模去設置錨框(那個數量級太大了),所以yolo的錨框原則是先通過對輸入圖片進行下采樣得到SxS的特征圖,設置n個尺寸的先驗框,這樣得到的總先驗錨框數就是SxSxn個
最后,再根據IOU(并交比,詳見:YOLO拓展-NMS算法-CSDN博客)選出目標框
1.2相關參數大小
尺度:描述基準錨框的大小信息。若尺度為x,那么基準錨框由原圖的寬和高分別都縮小x倍所得。 ? 寬高比:生成錨框的形狀信息,即最終生成錨框的寬和長的比。在改變寬高比時,應維持最終生成的錨框和基準錨框的面積恒定。
1.3 yolov2的改進
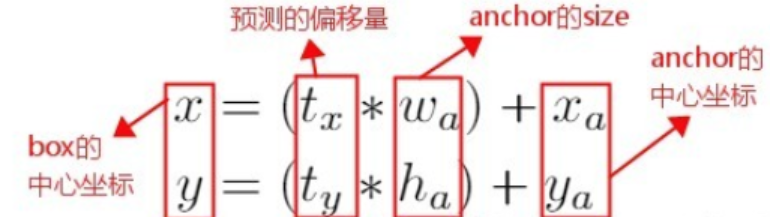
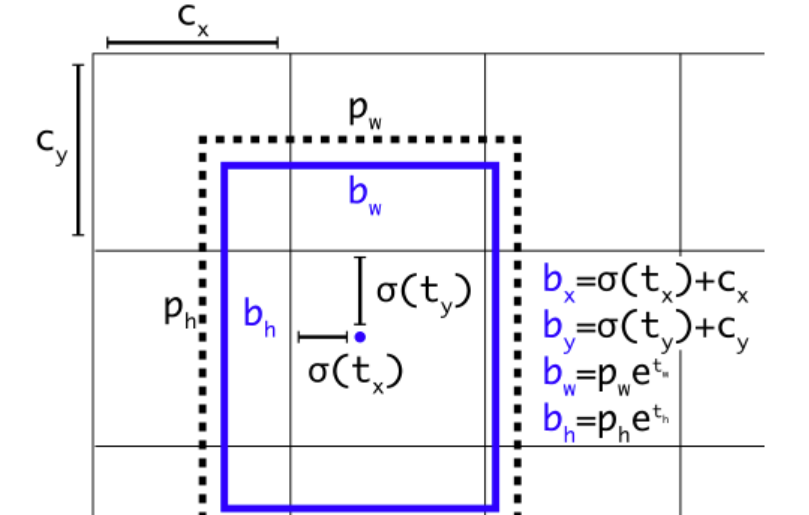
根據上述公式yolov2進行了一點改變:預測邊界框中心點相對于該網格左上角坐標( C x , C y )的相對偏移量,將bounding box的中心點約束在當前網格中.
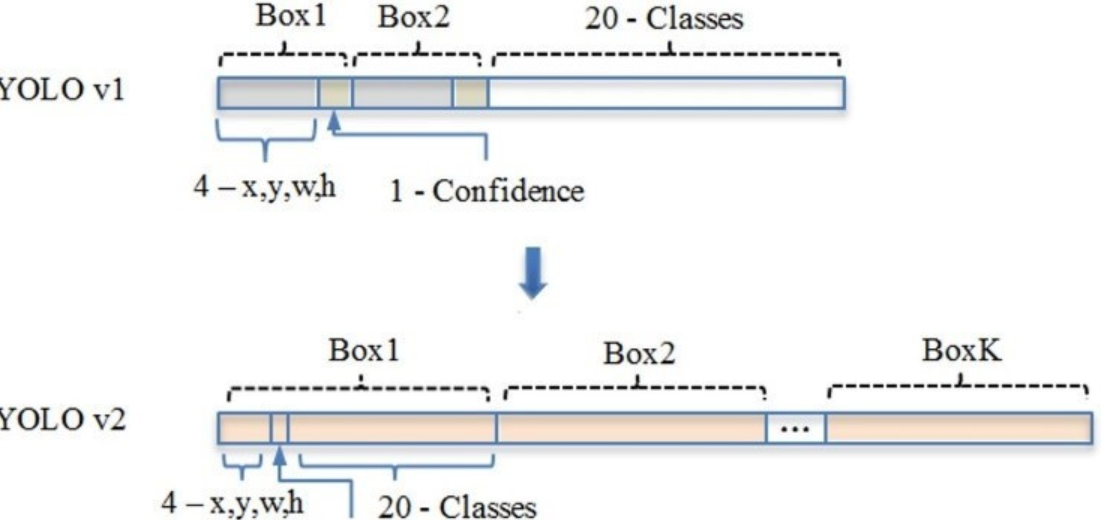
再把每個錨框都放入20個類別的特征,就可以實現多物體識別。




)







)






