功能性電刺激 (FES) 設備廣泛應用于康復和醫療實踐。其底層技術利用低能量電脈沖,在中風、脊髓損傷、多發性硬化癥、腦癱等各種疾病患者中人工產生身體運動。
一般來說,FES系統可以分為三類:開環、有限狀態控制和閉環方法。
這三種方法描述了 FES 系統從簡單到復雜的階段或演進。所有提到的方法都可以借助 Teslasuit 實現并提供給最終用戶。我們認為,這種統一可以覆蓋并簡化FES決策生命周期的大多數階段,從實驗室開發、學生和個人教育,到臨床應用。
研究目標
這項探索性研究旨在檢驗全身可穿戴Teslasuit技術作為自立式FES設備在醫療和康復領域的應用能力。具體而言,旨在確認Teslasuit可用作開環、有限狀態控制或閉環系統。

材料和方法
在本研究中,研究人員使用了全身Teslasuit、Teslasuit軟件開發套件(帶有Haptic Editor工具和Suit客戶端API的SDK)以及需要時的外部操作代碼。
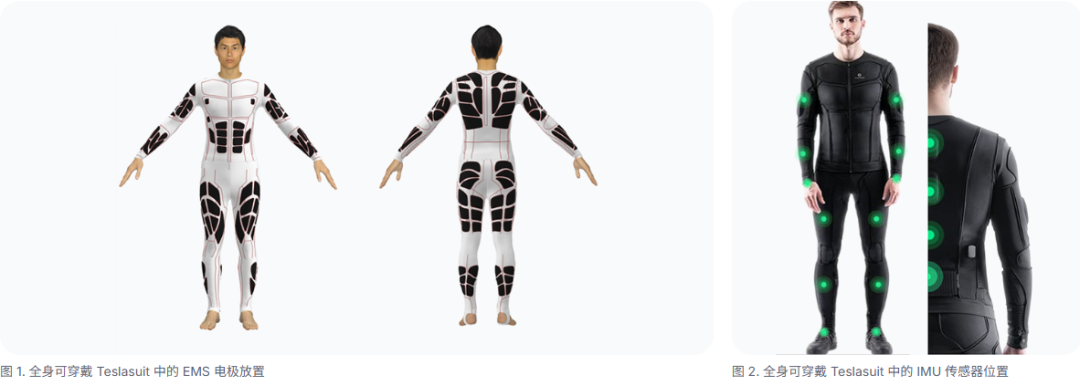
全身Teslasuit配備了一個標準的電刺激系統,該系統包含80個通道(每個肢體16個,背部和腹部16個,見圖1),以及一個包含14個慣性測量單元 (IMU) 傳感器的無標記運動捕捉系統(MoCap系統,見圖 2)。觸覺編輯工具允許為80個EMS通道中的每一個創建、調整和運行具有各種信號參數的刺激模式,固定電壓為60伏:刺激頻率可在1 至150Hz范圍內調整,刺激脈沖寬度可在1至320μs范圍內調整。
為了測試Teslasuit技術是否可用于FES,研究人員應用了不同FES方法的一般描述,并使用該技術的內置功能重現功能,或通過Suit客戶端API以最小可行產品 (MVP) 的形式使用其他外部功能對其進行擴展。
Teslasuit作為開環FES設備

一個開環系統已在Teslasuit上層軟件中開發并實現,作為觸覺編輯器工具(見圖3)。觸覺編輯器允許創建復雜的刺激模式,可在任何EMS通道內隨時間改變不同的電參數,或組合所有80個EMS通道之間的刺激模式。所有這些模式都可以保存為文件,以便以后用于相同或其他測試對象。
一個簡單的案例場景包括:
- 將套裝連接到計算機和觸覺編輯器。
- EMS系統校準。
- 在觸覺編輯器中創建和調整EMS刺激模式。
- 運行刺激模式可按時間循環或通過點擊“開始”按鈕進行。觸覺編輯器中的虛擬“開始”按鈕可以替換為真實世界的機械按鈕或其他觸發器(通過API連接到第三方設備)。

作為一個用于創建復雜刺激模式的可視化工具,Haptic Editor提供了幾乎無限的可能性,可以將Teslasuit技術調整為開環FES設備,以滿足任何需求。因此,Teslasuit技術可以作為開環FES設備,無需額外擴展,是一個開箱即用的解決方案,但僅用于研究目的。
學術課程
與Teslasuit建立學術研究合作關系,可享受學術研究折扣,開展 XR 和醫療領域的尖端研究。我們正在尋找以下領域的合作伙伴:
- 基礎和應用XR研究(沉浸式XR教育、XR醫療篩查和診斷、XR娛樂等的新方法)
- 使用Teslasuit對現有診斷和康復方法進行臨床試驗
- 生物力學分析的新方法(利用基于IMU的運動捕捉或EMG或兩者進行長期生物力學監測和任務特定分析)
- 電刺激(觸覺、EMS、TENS、FES、IFS)?的基礎與應用研究
- 生物醫學大數據算法開發(MoCap、EMG、PPG、ECG、HRV、BIA等)
Teslasuit 作為有限狀態FES設備

為了驗證Teslasuit技術在有限狀態FES中的應用,研究人員使用了一個運動捕捉接口及其應用的數據處理解決方案——步進檢測器。步進檢測器是一個SLTM神經網絡模型,基于預先收集的IMU數據(加速度計和陀螺儀)進行訓練,這些數據來自6名健康受試者在行走過程中的雙腿和背部。該模型使用標準機器學習流程進行訓練,數據分為訓練數據集 (80%)、測試數據集 (10%) 和驗證數據集 (10%)。驗證數據集的準確率超過 90%。
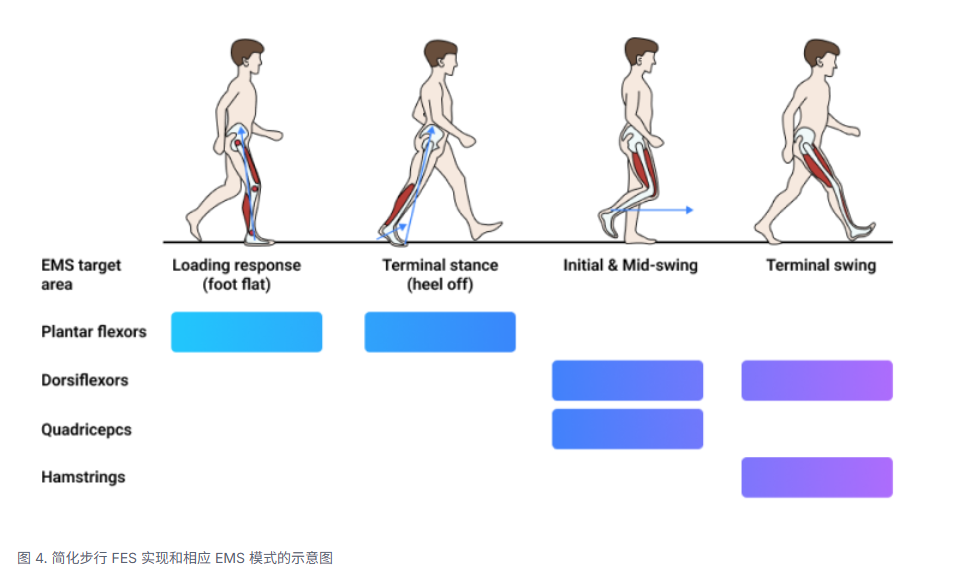
步進檢測器分別提供每只腳與地面接觸的信息。這些時間序列數據足以正確檢測四個步行階段(對應簡化的步態周期,見圖4):初始站立、終止站立、初始擺動、終止擺動。簡化的電刺激模式也相應分配。
一個簡單的案例場景包括:
- 將套裝連接到計算機。
- EMS系統校準。
- 運動捕捉系統校準。
支撐期以跖屈肌收縮為標志,隨后在整個擺動期,背屈肌持續收縮。初始擺動后,進行股四頭肌刺激以伸展腿部。腘繩肌刺激(可選)從擺動末期開始,以穩定腿部,防止在完全伸展的肢體上邁步。
由于一些實施方面的問題和肌肉生理學的原因,實際檢測到的擺動階段與股四頭肌刺激引起的實際膝關節伸展之間存在150-200毫秒的延遲。因此,股四頭肌刺激算法會在初始擺動檢測后立即啟動,以便在擺動中期輔助膝關節伸展。
開環方法的大部分討論點都“繼承”到了此MVP中。由于有限狀態系統嚴重依賴輸入數據,因此需要對MoCap系統進行額外驗證,提供一組步數檢測觸發器。更復雜的 MoCap數據,例如踝關節角度、角速度、角加速度,可以作為替代觸發器進行測試。為了方便最終用戶,所有MVP功能(例如校準、EMS 模式編輯器和跑步界面)最好都集成到我們的獨立程序中。
中期結果:Teslasuit技術能夠用作有限狀態FES設備。
Teslasuit作為閉環FES設備
為了驗證該概念,我們構建了一個基于簡化閉環控制概念的MVP,用于簡單的肘部屈曲控制任務。Teslasuit運動捕捉系統提供當前肘部角度的實時數據,并將其與操作員設定的目標值進行比較。當前角度與目標角度之間的差異(即由此產生的誤差)由PID控制器處理,從而調整所需的二頭肌刺激水平。
目前,采用肌肉響應函數,進一步利用經典的Ziegler-Nichols方法選擇PID控制器的系數,解決了針對每個特定用戶的PID控制器校準算法的問題。
一個簡單的案例場景包括:
- 將套裝連接到計算機。
- EMS系統校準。
- PID控制器校準。
中期結果:根據專注于FES的醫療保健專業人士的建議,有可能改進這個MVP。
關于搜維爾科技
搜維爾科技作為Teslasuit動作捕捉系統的中國大陸授權代理經銷商全力為您提供優質服務。我們希望將更多標桿級與應用尖端技術的科技產品帶入到蓬勃發展的國內市場中,以協助更多企業與高校拓展技術開發、探索創新領域。



)







:匿名函數:lambda表達式的簡潔用法(結合filter/map))
暴力枚舉)






