近日,度量用戶、北京理工大學俞玉樹老師團隊在IEEE RAL,IEEE TRO和IEEE TASE期刊上分別發表論文,研究著力于解決多飛行器集聯平臺(Integrated Aerial Platforms, IAPs)的相對位姿和全局定位問題,提出IAP的控制和狀態估計框架,為飛行操作機器人執行多功能空中操作任務奠定堅實基礎。研究采用NOKOV度量動作捕捉系統為IAP提供高精度位姿真值數據。
論文一
IEEE RAL (2024): Multi-Agent Visual-Inertial Localization for Integrated Aerial Systems With Loose Fusion of Odometry and Kinematics
引用格式
Lai G, Shi C, Wang K, et al. Multi-agent visual-inertial localization for integrated aerial systems with loose fusion of odometry and kinematics[J]. IEEE Robotics and Automation Letters, 2024, 9(7): 6504-6511.
該研究首次提出了一種針對IAP的多智能體定位框架,將無人機個體的視覺慣性里程計數據與IAP內部的運動學約束進行巧妙融合,從而充分利用系統內部的幾何結構信息,有效克服因運動受限而導致的定位漂移和精度下降問題。
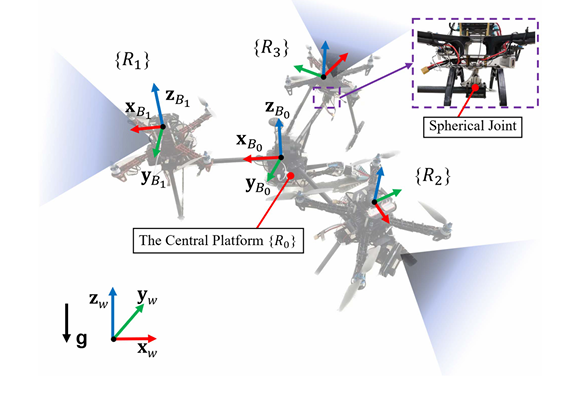
一個三智能體的IAP及其參考坐標系圖解
研究團隊首先推導并構建了一個不依賴于具體運動學參數的通用約束公式,該公式適用于不同IAP構型,從而顯著提升系統的通用性和魯棒性。在此基礎上,團隊進一步構建了一個基于滑動窗口優化的狀態估計器,以此融合來自無人機個體視覺里程計與IAP內部運動學約束的信息。通過這種優化機制,系統能夠在運動過程中估計各智能體間的相對變換,為集成式多機器人系統在復雜環境下的高精度自主定位提供了可行的技術路徑。實驗結果表明,該方法顯著提升了定位精度,與基線方法相比,全局定位漂移明顯減少,相對定位誤差大幅降低。
實驗視頻1
度量動捕為研究提供IAP智能體及中央平臺的高精度軌跡真值,評估和驗證本文定位系統的性能。
論文二
IEEE TASE (2025): Tight Fusion of Odometry, Kinematic Constraints, and UWB Ranging Systems for State Estimation of Integrated Aerial Platforms
引用格式
Yu Y, Fan Y, Lai G, et al. Tight Fusion of Odometry, Kinematic Constraints, and UWB Ranging Systems for State Estimation of Integrated Aerial Platforms[J]. IEEE Transactions on Automation Science and Engineering, 2025.
該論文聚焦于IAP在復雜環境中的精準 定位問題,提出了一種僅使用機載傳感器和真實UWB測量數據的方法,提高IAP在現實場景中的應用潛力,為去中心化多飛行器定位提供了新的思路。
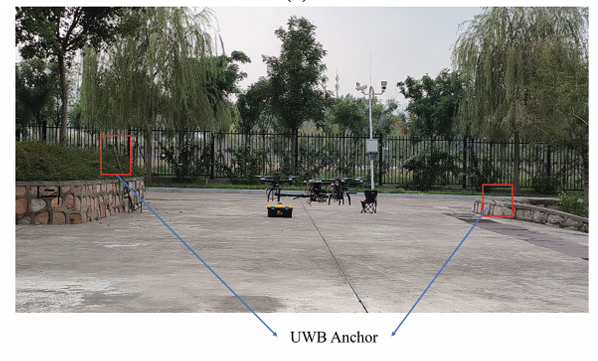
實際飛行過程中的環境設置
該研究創新性地將IAP物理約束與超寬帶(UWB)測距數據結合,從而實現多飛行器坐標系的快速、高效統一和錨點位置的精確估計。研究團隊為每個子飛行器構建了一個基于位置、速度和姿態約束的分散優化問題,將其命名為視覺-慣性-距離-物理里程計(VIRPO)。去中心化的設計減少了對中央處理單元的依賴,這有助于提高系統的可擴展性。基于數據集的廣泛評估表明,與基準算法相比,VIRPO算法展現出更高的定位精度,在真實數據集上的里程計漂移降低了28.7%。該研究首次將該算法集成到真實的IAP上,并通過飛行實驗成功驗證了其在實際應用中的性能。
度量動捕為研究提供IAPS高精度位姿數據,用于生成模擬的UWB測量數據,以評估本文算法的性能。
論文三
IEEE TRO (2025): Versatile Tasks on Integrated Aerial Platforms Using Only Onboard Sensors: Control, Estimation, and Validation
引用格式
Wang K, Lai G, Yu Y, et al. Versatile Tasks on Integrated Aerial Platforms Using Only Onboard Sensors: Control, Estimation, and Validation[J]. IEEE Transactions on Robotics, 2025.
在此背景下,俞玉樹老師團隊于2025年在機器人學頂刊IEEE TRO上發表了論文“Versatile Tasks on Integrated Aerial Platforms Using Only Onboard Sensors: Control, Estimation, and Validation”。該研究在先前工作的基礎上,提出一個全面的控制與狀態估計框架,旨在充分利用IAP執行多樣化任務的潛力。
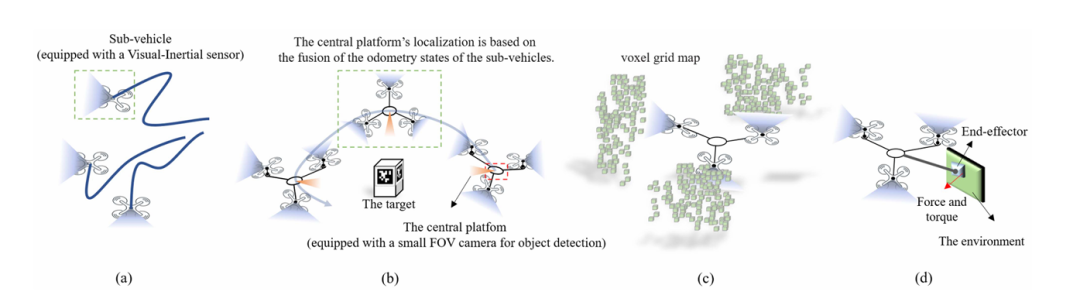
三飛行器IAP不同任務快照
該論文提出了一種通用的綜合框架,集成了底層控制、交互控制、直接力和扭矩控制、感知目標觀測算法和運動-里程融合狀態估計算法。無需依賴力/扭矩傳感器或外部定位系統即可實現功能,極大增強了系統的自主性和普適性。
為在運動中持續觀測目標,研究設計了一種視覺感知姿態校正算法,稱為Perception-Aware Model Predictive Control,PAMPC。該算法能夠使IAP的復雜動態系統保持目標始終位于其視場內。無坐標、全局有效且計算復雜度低的控制方案,能夠解決在復雜動態環境下進行有效目標感知的難題。
為解決在缺乏外部定位系統時IAP的自主定位的問題,論文提出了一種相對變換估計(RTE)算法。該算法通過將子飛行器和中心平臺的運動學約束與視覺-慣性里程計(VIO)數據進行松耦合融合,顯著提升整個平臺的全局定位精度。研究基于真實IAP原型機的實驗,首次證明了該框架僅依賴機載傳感器執行多種復雜任務的可行性,并驗證了所提框架和融合算法的有效性。
實驗視頻
度量動捕為研究提供IAP高精度軌跡真值,助力評估和驗證本文定位方法的準確性和有效性。
以上三篇論文集中體現了俞玉樹老師團隊在IAP研究領域的一系列系統性探索以及取得的重要進展。為進一步推動該領域交流,俞玉樹老師將在智能機器人與系統國際會議IROS 2025上,共同組織“Advancements in Aerial Physical Interaction” Workshop。
NOKOV度量動作捕捉很榮幸贊助本次Workshop,歡迎相關領域研究者投稿參與,共同探討空中機器人物理交互的前沿問題。
詳情請見研討會海報:

通訊作者介紹

俞玉樹,北京理工大學機電學院副教授、博士生導師。主要研究方向為飛行機器人的柔順控制、感知、學習。本、碩、博均畢業于北京航空航天大學。曾在北京航空航天大學、新加坡南洋理工大學、瑞典查爾姆斯理工大學從事博士后研究。國家自然科學基金面上項目、青年科學基金項目、重點研發計劃子課題負責人。曾獲ICCSIP最佳論文、IEEE ICMA Toshio Fukuda Best Award in Mechatronics等獎項。目前擔任Drones編委、ICRA副主編。
)
 v1.0.2 綠色版)
)
:91-100語法+考え方13)


)

)





——非傳統影像輕量級解決方案)




)