??零知IDE 是一個真正屬于國人自己的開源軟件平臺,在開發效率上超越了Arduino平臺并且更加容易上手,大大降低了開發難度。零知開源在軟件方面提供了完整的學習教程和豐富示例代碼,讓不懂程序的工程師也能非常輕而易舉的搭建電路來創作產品,測試產品。快來動手試試吧!
?訪問零知實驗室,獲取更多實戰項目和教程資源吧!
www.lingzhilab.com
目錄
一、硬件系統設計
1.1?硬件清單
1.2 接線方案
1.3?硬件連接圖
1.4 接線實物圖?
二、軟件系統設計
2.1?頭文件與引腳定義
2.2?對象初始化與全局變量
2.3 核心函數詳解
2.4 完整代碼
三、操作結果展示
3.1 操作流程
3.2?顯示屏界面分布
3.3 視頻演示
四、ADXL362的SPI接口技術
4.1 SPI通信方式
4.2?SPI數據傳輸和接收機制
4.3 加速度數據格式和解析
五、常見問題解答 (FAQ)
Q1: 為什么我的串口打印是亂碼?
Q2: 小球控制不靈敏或反向?
Q3: 小球穿墻bug如何處理?
(1)項目概述
????????本項目是一個有趣的嵌入式體感交互游戲。核心功能是通過一個三維加速度傳感器ADXL362來檢測開發板的傾斜姿態,從而控制屏幕上的小球在迷宮內移動,躲避墻壁,最終抵達隨機生成的目標點。項目綜合了傳感器數據采集、數據處理、圖形顯示、碰撞檢測等多個嵌入式開發的關鍵知識點?
(2)項目亮點
? ? ? ? >通過傾斜ADXL362傳感器進行體感交互操作游戲
? ? ? ? >實時繪制迷宮、小球和目標點,視覺效果清晰
? ? ? ? >系統啟動時自動校準加速度計,消除靜態誤差
? ? ? ? >采用局部刷新策略,避免整屏刷新帶來的閃爍
(3)項目難點及解決方案
????????問題1描述:簡單的中心點檢測會導致小球“嵌”入墻壁。
解決方案:
?? ? ? ? 采用多點檢測法,同時檢測小球的上、下、左、右四個邊緣點以及四個角點,確保任何部位觸墻都能被準確識別。
????????問題2描述:傳感器原始數據存在噪聲和偏移,導致小球無故移動。
解決方案:
? ? ? ? 軟件死區: 設置一個閾值 (deadZone),忽略微小的加速度值。
? ? ? ? 開機校準: 在?setup()?階段讀取多次數據求平均值,將后續讀數減去此平均值以消除零偏。
一、硬件系統設計
1.1?硬件清單
| 組件 | 數量 | 說明 |
|---|---|---|
| 零知標準板 | 1 | 主控制器,基于STM32F103RBT6。 |
| ST7789 TFT屏 | 1 | 1.3英寸,240x240分辨率,SPI接口。 |
| ADXL362加速度計 | 1 | 超低功耗,SPI/I2C接口,本項目使用SPI。 |
| 杜邦線 | 若干 | 用于連接各模塊。 |
| Micro USB線 | 1 | 為開發板供電和程序下載。 |
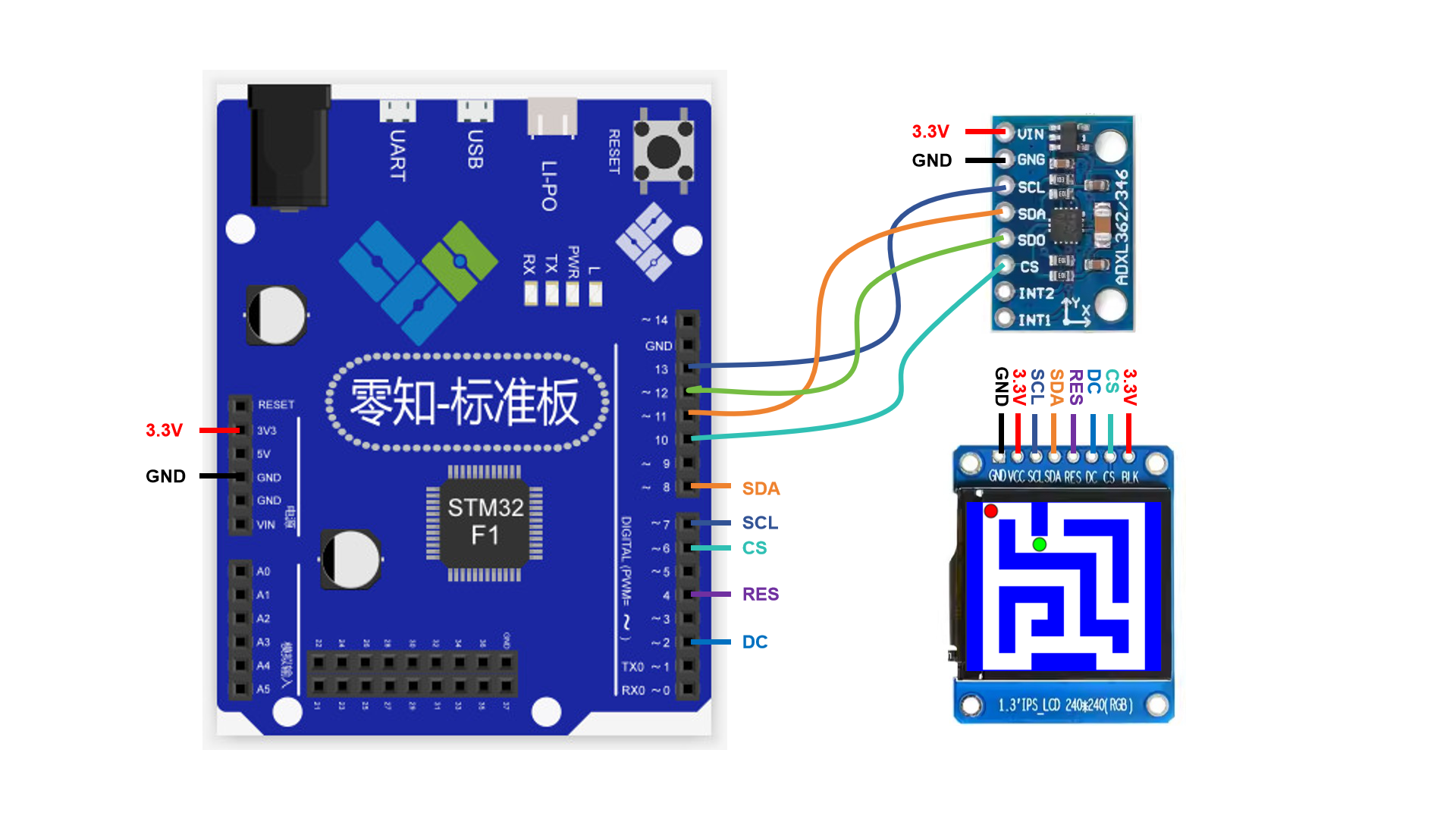
1.2 接線方案
請嚴格按照代碼中的引腳定義進行連接:
(1)ADXL362 傳感器接線
| ADXL362引腳 | 零知標準板引腳 | 功能 |
|---|---|---|
| VCC | 3.3V | 電源 |
| GND | GND | 地 |
| CS | 10 | 片選(SPI) |
| MOSI | 11 (硬件SPI) | SPI主出從入 |
| MISO | 12 (硬件SPI) | SPI主入從出 |
| SCLK | 13 (硬件SPI) | SPI時鐘 |
(2)ST7789顯示屏接線
| ST7789引腳 | 零知標準板引腳 | 功能 |
|---|---|---|
| VCC | 3.3V 或 5V* | 電源 (*視屏幕型號而定) |
| GND | GND | 地 |
| CS | 6 | 片選(軟件SPI) |
| DC | 2 | 數據/命令控制 |
| RST | 4 | 復位 |
| MOSI | 8 | 軟件SPI數據線 |
| SCK | 7 | 軟件SPI時鐘線 |
| BL | 3.3V | 背光(可選) |
? ? ? ? PS:代碼中TFT屏使用了軟件SPI(引腳7, 8),而ADXL362使用了硬件SPI(引腳10,11,12,13)
1.3?硬件連接圖
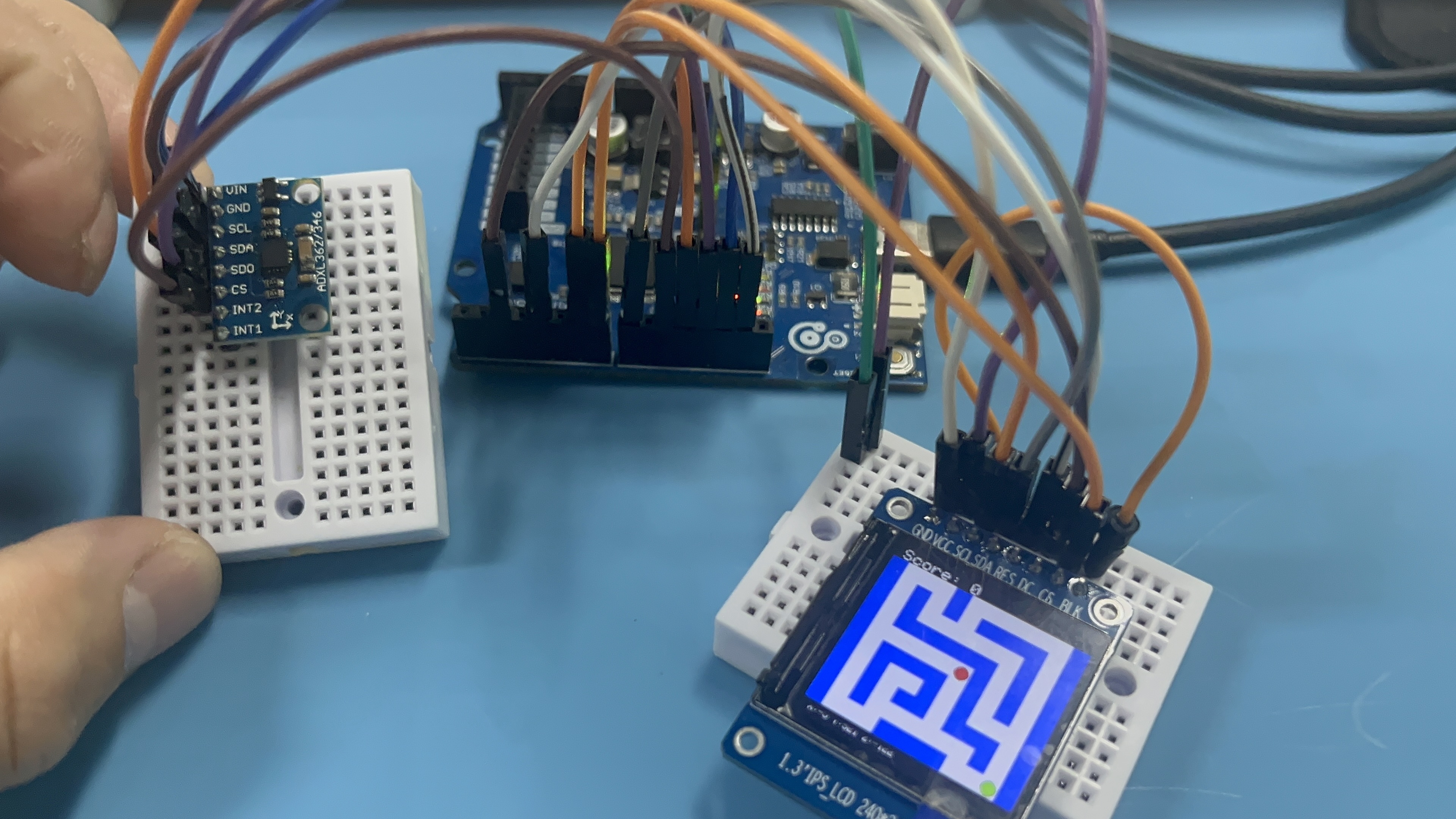
1.4 接線實物圖?
?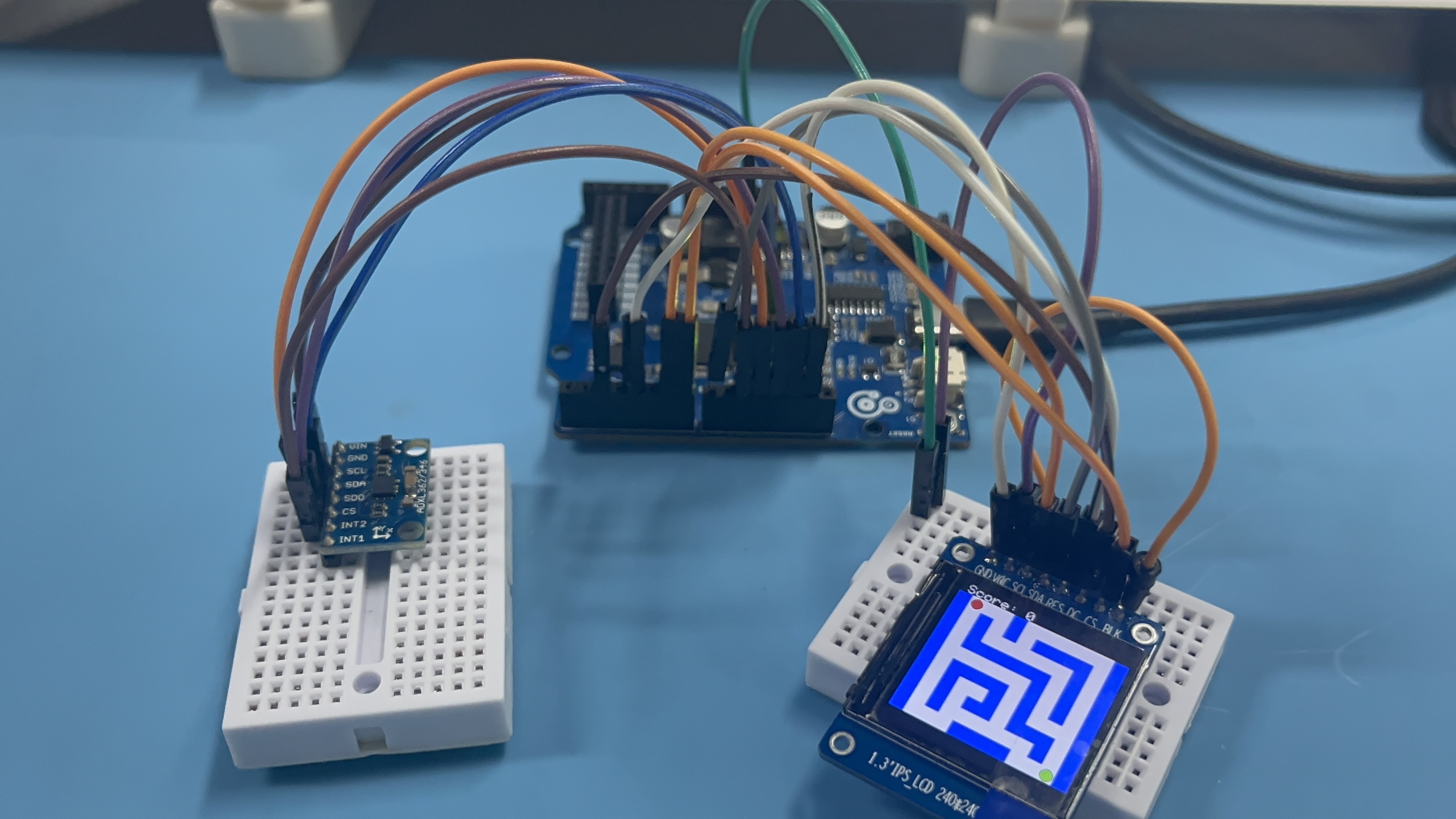 ?
?
二、軟件系統設計
2.1?頭文件與引腳定義
????????BALL_RADIUS: 決定了小球的大小和碰撞檢測范圍。
????????MAZE_CELL_SIZE: 決定了迷宮的精細度。增大它會使迷宮更簡單,小球移動空間更大。
????????MAZE_WIDTH & MAZE_HEIGHT: 由屏幕分辨率和單元格大小自動計算得出。
#include <SPI.h>
#include <Wire.h> // 本項目未使用I2C,可移除
#include <Adafruit_GFX.h>
#include <Adafruit_ST7789.h>
#include <ADXL362.h>// ST7789 顯示屏引腳定義 (使用軟件SPI)
#define TFT_CS 6
#define TFT_RST 4
#define TFT_DC 2
#define TFT_MOSI 8
#define TFT_SCLK 7// 定義顯示屏參數
#define SCREEN_WIDTH 240
#define SCREEN_HEIGHT 240// 顏色定義 (ST77XX_ 是Adafruit庫預定義的顏色)
#define BACKGROUND ST77XX_BLACK
#define TEXT_COLOR ST77XX_WHITE
#define WALL_COLOR ST77XX_BLUE
#define BALL_COLOR ST77XX_RED
#define TARGET_COLOR ST77XX_GREEN
#define PATH_COLOR ST77XX_WHITE // 路徑顏色,通常為背景色或淺色// 游戲參數
#define BALL_RADIUS 8 // 小球像素半徑
#define MAZE_CELL_SIZE 20 // 每個迷宮單元格的像素大小
#define MAZE_WIDTH (SCREEN_WIDTH / MAZE_CELL_SIZE) // 迷宮寬度(單元格數)
#define MAZE_HEIGHT (SCREEN_HEIGHT / MAZE_CELL_SIZE) // 迷宮高度(單元格數)2.2?對象初始化與全局變量
????????maze數組: 這是一個二維數組,完全定義了迷宮的布局。修改這個數組就可以創造全新的關卡。1代表墻,0代表可通行的路徑。
Adafruit_ST7789 tft = Adafruit_ST7789(TFT_CS, TFT_DC, TFT_MOSI, TFT_SCLK, TFT_RST);
ADXL362 xl;// 小球和目標的初始位置(位于迷宮左上角和右下角路徑的中央)
int ballX = MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;
int ballY = MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;
int targetX = (MAZE_WIDTH - 2) * MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;
int targetY = (MAZE_HEIGHT - 2) * MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;// 迷宮地圖 (0=路徑, 1=墻)
byte maze[MAZE_HEIGHT][MAZE_WIDTH] = { ... }; // 此處省略數組內容// 加速度校準值
int16_t calibX = 0;
int16_t calibY = 0;
int16_t calibZ = 0;2.3 核心函數詳解
(1)calibrateAccelerometer() - 傳感器校準
void calibrateAccelerometer() {Serial.println("Calibrating accelerometer...");// 讀取多次樣本并取平均值long sumX = 0, sumY = 0, sumZ = 0;int samples = 20;for (int i = 0; i < samples; i++) {xl.readXYZTData(accelX, accelY, accelZ, temp);sumX += accelX;sumY += accelY;sumZ += accelZ;delay(10);}calibX = sumX / samples;calibY = sumY / samples;calibZ = sumZ / samples;
}(2)clearBall() - 優化的小球清除
????????避免了重繪整個屏幕或整個單元格,極大減少了刷新時間,消除了畫面閃爍,精確地恢復小球所占區域的原始迷宮圖案。
void clearBall(int x, int y) {// 只清除小球區域,不重新繪制整個迷宮// 創建一個臨時緩沖區來存儲小球區域的背景uint16_t bgBuffer[(BALL_RADIUS*2+2) * (BALL_RADIUS*2+2)];// 確定要清除的區域int clearX1 = max(0, x - BALL_RADIUS - 1);int clearY1 = max(0, y - BALL_RADIUS - 1);int clearX2 = min(SCREEN_WIDTH - 1, x + BALL_RADIUS + 1);int clearY2 = min(SCREEN_HEIGHT - 1, y + BALL_RADIUS + 1);int width = clearX2 - clearX1 + 1;int height = clearY2 - clearY1 + 1;// 繪制正確的背景for (int py = clearY1; py <= clearY2; py++) {for (int px = clearX1; px <= clearX2; px++) {// 計算像素到小球中心的距離int dx = px - x;int dy = py - y;int distance = dx*dx + dy*dy;// 如果在小球半徑范圍內,則繪制正確的背景if (distance <= (BALL_RADIUS+1)*(BALL_RADIUS+1)) {// 獲取像素所在的迷宮單元格int cellX = px / MAZE_CELL_SIZE;int cellY = py / MAZE_CELL_SIZE;// 根據單元格類型選擇顏色uint16_t color = (maze[cellY][cellX] == 1) ? WALL_COLOR : PATH_COLOR;// 繪制像素tft.drawPixel(px, py, color);}}}
}(3)updateBallPosition() - 控制邏輯
????????deadZone: 死區范圍。絕對值小于50的加速度讀數將被視為噪聲并忽略,防止小球輕微抖動。
void updateBallPosition() {const int deadZone = 50; // 死區閾值,過濾微小抖動xl.readXYZTData(accelX, accelY, accelZ, temp); // 讀取數據accelX -= calibX; // 應用校準accelY -= calibY;int moveX = 0;int moveY = 0;// 映射加速度值到移動速度if (abs(accelX) > deadZone) {moveX = map(accelX, -200, 200, -5, 5); // 映射范圍可調整}if (abs(accelY) > deadZone) {moveY = map(accelY, -200, 200, -5, 5);}ballX = constrain(ballX + moveX, BALL_RADIUS, SCREEN_WIDTH - BALL_RADIUS);ballY = constrain(ballY - moveY, BALL_RADIUS, SCREEN_HEIGHT - BALL_RADIUS); // 注意Y軸是減
}(4)checkCollision() 與 checkPointCollision() - 碰撞檢測
????????綜合檢查四邊中點和四個角點共8個點是否進入墻壁單元格。這種多點檢測法比只檢查中心點要準確得多,能有效防止卡墻和穿墻的Bug
bool checkCollision() {// 檢查小球邊緣的四個中點int top = ballY - BALL_RADIUS;int cellYTop = top / MAZE_CELL_SIZE;if (maze[cellYTop][ballX/MAZE_CELL_SIZE] == 1) return true;// ... 檢查bottom, left, right ...// 檢查四個角點if (checkPointCollision(ballX - BALL_RADIUS, ballY - BALL_RADIUS)) return true; // 左上角// ... 檢查其他三個角 ...return false;
}bool checkPointCollision(int x, int y) {int cellX = x / MAZE_CELL_SIZE;int cellY = y / MAZE_CELL_SIZE;// 檢查是否撞墻return (maze[cellY][cellX] == 1);
}2.4 完整代碼
#include <SPI.h>
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_ST7789.h>
#include <ADXL362.h>// ST7789 顯示屏引腳定義
#define TFT_CS 6 // 設置軟件SPI的片選引腳
#define TFT_RST 4 // 顯示屏復位引腳
#define TFT_DC 2 // 顯示屏數據/控制命令引腳
#define TFT_MOSI 8 // 軟件SPI的MOSI引腳
#define TFT_SCLK 7 // 軟件SPI的SCK引腳Adafruit_ST7789 tft = Adafruit_ST7789(TFT_CS, TFT_DC, TFT_MOSI, TFT_SCLK, TFT_RST);// 定義顯示屏參數
#define SCREEN_WIDTH 240
#define SCREEN_HEIGHT 240// 顏色定義
#define BACKGROUND ST77XX_BLACK
#define TEXT_COLOR ST77XX_WHITE
#define WALL_COLOR ST77XX_BLUE
#define BALL_COLOR ST77XX_RED
#define TARGET_COLOR ST77XX_GREEN
#define PATH_COLOR ST77XX_WHITE// ADXL362對象
ADXL362 xl;// 游戲參數
#define BALL_RADIUS 8
#define MAZE_CELL_SIZE 20
#define MAZE_WIDTH (SCREEN_WIDTH / MAZE_CELL_SIZE)
#define MAZE_HEIGHT (SCREEN_HEIGHT / MAZE_CELL_SIZE)// 小球位置
int ballX = MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;
int ballY = MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;// 目標位置
int targetX = (MAZE_WIDTH - 2) * MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;
int targetY = (MAZE_HEIGHT - 2) * MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;// 加速度數據
int16_t accelX, accelY, accelZ, temp;// 迷宮地圖 (0=路徑, 1=墻)
byte maze[MAZE_HEIGHT][MAZE_WIDTH] = {{1,1,1,1,1,1,1,1,1,1,1,1},{1,0,0,0,1,0,0,0,0,0,0,1},{1,0,1,0,1,0,1,1,1,1,0,1},{1,0,1,0,0,0,0,0,0,1,0,1},{1,0,1,1,1,1,1,1,0,1,0,1},{1,0,0,0,0,0,0,1,0,1,0,1},{1,0,1,1,1,1,0,1,0,1,0,1},{1,0,1,0,0,1,0,1,0,0,0,1},{1,0,1,0,1,1,0,1,1,1,0,1},{1,0,1,0,0,0,0,0,0,1,0,1},{1,0,0,0,1,1,1,1,0,0,0,1},{1,1,1,1,1,1,1,1,1,1,1,1}
};// 游戲狀態
bool gameActive = true;
int score = 0;// 加速度校準值
int16_t calibX = 0;
int16_t calibY = 0;
int16_t calibZ = 0;// 計時器變量
unsigned long lastDebugUpdate = 0;
const unsigned long DEBUG_UPDATE_INTERVAL = 10; // 每500ms更新一次調試信息void setup() {Serial.begin(9600);// 初始化顯示屏tft.init(SCREEN_WIDTH, SCREEN_HEIGHT);tft.setRotation(1);tft.fillScreen(BACKGROUND);tft.setTextColor(TEXT_COLOR);tft.setTextSize(1);// 顯示初始化信息tft.setCursor(50, 100);tft.print("Initializing...");// 初始化加速度計xl.begin(10); // CS引腳連接D10xl.beginMeasure(); // 進入測量模式// 校準加速度計 - 讀取初始值作為偏移calibrateAccelerometer();// 繪制迷宮drawMaze();// 繪制目標drawTarget();// 繪制初始小球drawBall();// 顯示游戲信息displayGameInfo();delay(1000);
}void loop() {if (!gameActive) {delay(100);return;}// 讀取加速度數據xl.readXYZTData(accelX, accelY, accelZ, temp);// 應用校準accelX -= calibX;accelY -= calibY;accelZ -= calibZ;// 保存舊位置int oldBallX = ballX;int oldBallY = ballY;// 根據加速度更新小球位置updateBallPosition();// 檢查碰撞if (checkCollision()) {// 如果碰撞,恢復舊位置ballX = oldBallX;ballY = oldBallY;} else {// 清除舊位置的小球clearBall(oldBallX, oldBallY);// 繪制新位置的小球drawBall();}// 檢查是否到達目標if (checkTargetReached()) {score++;displayGameInfo();// 生成新目標generateNewTarget();drawTarget();// 短暫暫停delay(500);}// 控制調試信息刷新率unsigned long currentTime = millis();if (currentTime - lastDebugUpdate >= DEBUG_UPDATE_INTERVAL) {displayDebugInfo();lastDebugUpdate = currentTime;}// 控制游戲速度delay(50);
}// 校準加速度計
void calibrateAccelerometer() {Serial.println("Calibrating accelerometer...");// 讀取多次樣本并取平均值long sumX = 0, sumY = 0, sumZ = 0;int samples = 20;for (int i = 0; i < samples; i++) {xl.readXYZTData(accelX, accelY, accelZ, temp);sumX += accelX;sumY += accelY;sumZ += accelZ;delay(10);}calibX = sumX / samples;calibY = sumY / samples;calibZ = sumZ / samples;Serial.print("Calibration values - X: ");Serial.print(calibX);Serial.print(" Y: ");Serial.print(calibY);Serial.print(" Z: ");Serial.println(calibZ);
}// 繪制迷宮
void drawMaze() {for (int y = 0; y < MAZE_HEIGHT; y++) {for (int x = 0; x < MAZE_WIDTH; x++) {if (maze[y][x] == 1) {tft.fillRect(x * MAZE_CELL_SIZE, y * MAZE_CELL_SIZE, MAZE_CELL_SIZE, MAZE_CELL_SIZE, WALL_COLOR);} else {tft.fillRect(x * MAZE_CELL_SIZE, y * MAZE_CELL_SIZE, MAZE_CELL_SIZE, MAZE_CELL_SIZE, PATH_COLOR);}}}
}// 繪制小球
void drawBall() {tft.fillCircle(ballX, ballY, BALL_RADIUS, BALL_COLOR);// 繪制小球輪廓tft.drawCircle(ballX, ballY, BALL_RADIUS, BACKGROUND);
}// 清除小球
void clearBall(int x, int y) {// 只清除小球區域,不重新繪制整個迷宮// 創建一個臨時緩沖區來存儲小球區域的背景uint16_t bgBuffer[(BALL_RADIUS*2+2) * (BALL_RADIUS*2+2)];// 確定要清除的區域int clearX1 = max(0, x - BALL_RADIUS - 1);int clearY1 = max(0, y - BALL_RADIUS - 1);int clearX2 = min(SCREEN_WIDTH - 1, x + BALL_RADIUS + 1);int clearY2 = min(SCREEN_HEIGHT - 1, y + BALL_RADIUS + 1);int width = clearX2 - clearX1 + 1;int height = clearY2 - clearY1 + 1;// 繪制正確的背景for (int py = clearY1; py <= clearY2; py++) {for (int px = clearX1; px <= clearX2; px++) {// 計算像素到小球中心的距離int dx = px - x;int dy = py - y;int distance = dx*dx + dy*dy;// 如果在小球半徑范圍內,則繪制正確的背景if (distance <= (BALL_RADIUS+1)*(BALL_RADIUS+1)) {// 獲取像素所在的迷宮單元格int cellX = px / MAZE_CELL_SIZE;int cellY = py / MAZE_CELL_SIZE;// 根據單元格類型選擇顏色uint16_t color = (maze[cellY][cellX] == 1) ? WALL_COLOR : PATH_COLOR;// 繪制像素tft.drawPixel(px, py, color);}}}
}// 繪制目標
void drawTarget() {tft.fillCircle(targetX, targetY, BALL_RADIUS, TARGET_COLOR);// 繪制目標輪廓tft.drawCircle(targetX, targetY, BALL_RADIUS, BACKGROUND);
}// 更新小球位置
void updateBallPosition() {// 應用死區過濾微小移動const int deadZone = 50;// 映射加速度到移動速度int moveX = 0;int moveY = 0;// 根據您的傳感器數據調整映射范圍if (abs(accelX) > deadZone) {moveX = map(accelX, -200, 200, -5, 5);}if (abs(accelY) > deadZone) {moveY = map(accelY, -200, 200, -5, 5);}// 更新位置ballX = constrain(ballX + moveX, BALL_RADIUS, SCREEN_WIDTH - BALL_RADIUS);ballY = constrain(ballY - moveY, BALL_RADIUS, SCREEN_HEIGHT - BALL_RADIUS); // 注意Y軸方向// 調試輸出Serial.print("Accel - X: ");Serial.print(accelX);Serial.print(" Y: ");Serial.print(accelY);Serial.print(" Move - X: ");Serial.print(moveX);Serial.print(" Y: ");Serial.print(moveY);Serial.print(" Ball - X: ");Serial.print(ballX);Serial.print(" Y: ");Serial.println(ballY);
}// 檢查碰撞 - 使用小球邊緣進行檢測
bool checkCollision() {// 檢查小球邊緣的四個點int top = ballY - BALL_RADIUS;int bottom = ballY + BALL_RADIUS;int left = ballX - BALL_RADIUS;int right = ballX + BALL_RADIUS;// 檢查上邊緣int cellXTop = ballX / MAZE_CELL_SIZE;int cellYTop = top / MAZE_CELL_SIZE;if (cellYTop >= 0 && cellYTop < MAZE_HEIGHT && cellXTop >= 0 && cellXTop < MAZE_WIDTH &&maze[cellYTop][cellXTop] == 1) {return true;}// 檢查下邊緣int cellXBottom = ballX / MAZE_CELL_SIZE;int cellYBottom = bottom / MAZE_CELL_SIZE;if (cellYBottom >= 0 && cellYBottom < MAZE_HEIGHT && cellXBottom >= 0 && cellXBottom < MAZE_WIDTH &&maze[cellYBottom][cellXBottom] == 1) {return true;}// 檢查左邊緣int cellXLeft = left / MAZE_CELL_SIZE;int cellYLeft = ballY / MAZE_CELL_SIZE;if (cellYLeft >= 0 && cellYLeft < MAZE_HEIGHT && cellXLeft >= 0 && cellXLeft < MAZE_WIDTH &&maze[cellYLeft][cellXLeft] == 1) {return true;}// 檢查右邊緣int cellXRight = right / MAZE_CELL_SIZE;int cellYRight = ballY / MAZE_CELL_SIZE;if (cellYRight >= 0 && cellYRight < MAZE_HEIGHT && cellXRight >= 0 && cellXRight < MAZE_WIDTH &&maze[cellYRight][cellXRight] == 1) {return true;}// 檢查四個角點if (checkPointCollision(left, top) || checkPointCollision(right, top) ||checkPointCollision(left, bottom) || checkPointCollision(right, bottom)) {return true;}return false;
}// 檢查單個點是否碰撞
bool checkPointCollision(int x, int y) {int cellX = x / MAZE_CELL_SIZE;int cellY = y / MAZE_CELL_SIZE;// 檢查是否超出邊界if (cellX < 0 || cellX >= MAZE_WIDTH || cellY < 0 || cellY >= MAZE_HEIGHT) {return true;}// 檢查是否撞墻if (maze[cellY][cellX] == 1) {return true;}return false;
}// 檢查是否到達目標
bool checkTargetReached() {// 計算小球和目標之間的距離int dx = ballX - targetX;int dy = ballY - targetY;int distance = dx*dx + dy*dy;// 如果距離小于兩者半徑之和,則認為到達目標return distance < (BALL_RADIUS * 2);
}// 生成新目標
void generateNewTarget() {int newX, newY;bool validPosition = false;int attempts = 0;// 嘗試找到有效位置while (!validPosition && attempts < 50) {newX = random(1, MAZE_WIDTH - 1) * MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;newY = random(1, MAZE_HEIGHT - 1) * MAZE_CELL_SIZE + MAZE_CELL_SIZE / 2;// 檢查是否在墻上int cellX = newX / MAZE_CELL_SIZE;int cellY = newY / MAZE_CELL_SIZE;if (maze[cellY][cellX] == 0) {validPosition = true;}attempts++;}// 清除舊目標clearBall(targetX, targetY);// 設置新目標targetX = newX;targetY = newY;
}// 顯示游戲信息
void displayGameInfo() {// 在屏幕頂部顯示分數tft.fillRect(0, 0, SCREEN_WIDTH, 20, BACKGROUND);tft.setCursor(10, 5);tft.setTextColor(TEXT_COLOR);tft.setTextSize(2);tft.print("Score: ");tft.print(score);
}// 顯示調試信息
void displayDebugInfo() {// 在屏幕底部顯示加速度數據tft.fillRect(0, SCREEN_HEIGHT - 20, SCREEN_WIDTH, 20, BACKGROUND);tft.setCursor(10, SCREEN_HEIGHT - 15);tft.setTextColor(TEXT_COLOR);tft.setTextSize(1);tft.print("X:");tft.print(accelX);tft.print(" Y:");tft.print(accelY);tft.print(" Z:");tft.print(accelZ);
}
三、操作結果展示
3.1 操作流程
- 按照接線圖連接硬件。
- 用零知IDE打開并上傳代碼至零知標準板。
- 將開發板平放在桌面上,系統自動進行加速度計校準。
- 游戲開始后,傾斜傳感器。向前傾斜小球向下移動,向左傾斜小球向左移動,以此類推。傾斜角度越大,小球移動速度越快。
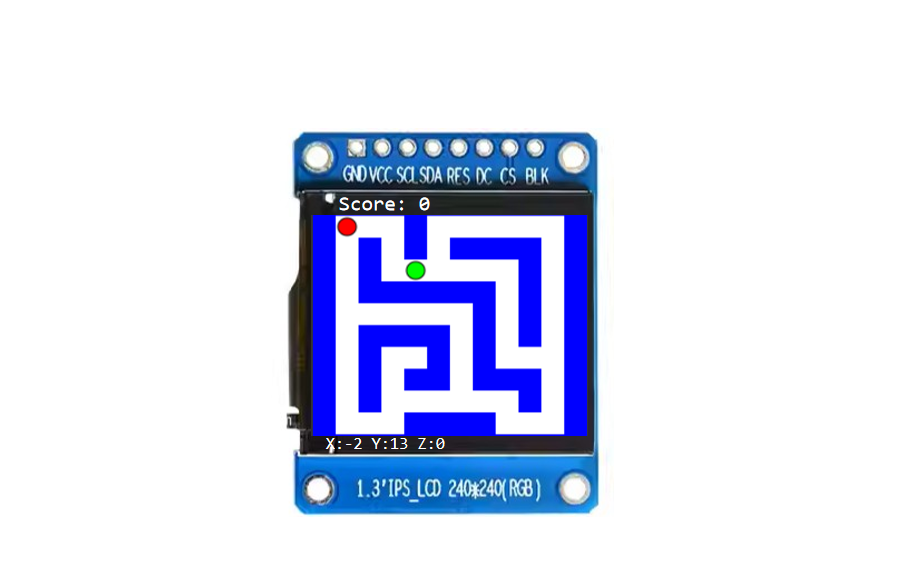
3.2?顯示屏界面分布
????????頂部區域(約20像素高): 顯示當前得分(Score)。
????????主體區域: 顯示迷宮、紅色小球和綠色目標點。
????????底部區域(約20像素高): 調試信息區,實時滾動顯示原始的加速度值(X, Y, Z)。
3.3 視頻演示
ADXL362三軸加速度計的體感迷宮游戲設計
實際游戲運行效果,包括傾斜控制、碰撞、得分
四、ADXL362的SPI接口技術
4.1 SPI通信方式
????????ADXL362支持SPI和I2C兩種通信協議。本項目采用SPI協議,因其速度更快,時序更穩
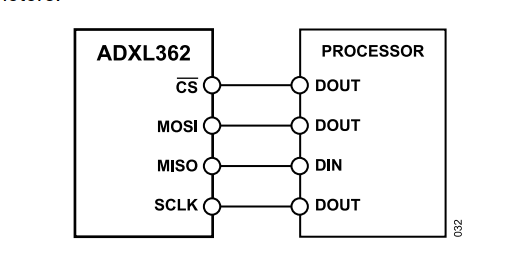
4.2?SPI數據傳輸和接收機制
????????在傳輸數據前,通過設置GPIO引腳的電平來激活CS信號,開始通信。
????????通過SPI的數據寄存器發送數據到SPI總線上。
????????發送數據的同時,通過讀取SPI的數據寄存器來接收數據。
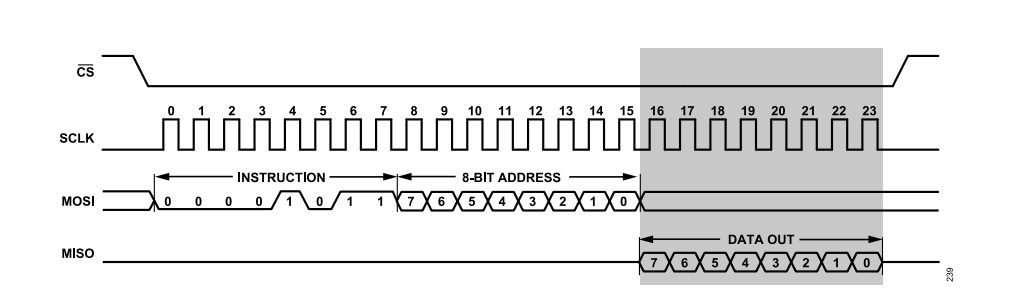
4.3 加速度數據格式和解析
????????加速度數據以數字值的形式存儲在特定的寄存器中,每個軸的數據通常由兩個連續的寄存器組成,一個用于高字節,一個用于低字節。代碼中使用 xl.readXYZTData(...) 函數一次性讀取X, Y, Z三軸的12位數字輸出和溫度值
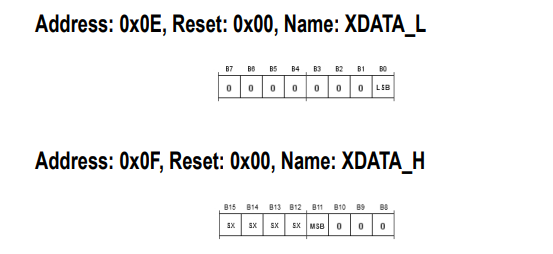
? ? ? ? XDATA_L包含8個最低有效位(LSBs), XDATA_H包含4個最高有效位(MSBs)
五、常見問題解答 (FAQ)
Q1: 為什么我的串口打印是亂碼?
A:請排查:
????????確保零知IDE的串口監視器的波特率設置為9600,與代碼中的 Serial.begin(9600) 一致。
Q2: 小球控制不靈敏或反向?
A:請根據以下提示操作:
????????調整 updateBallPosition() 函數中的 map 函數的參數,例如將 map(accelY, -200, 200, -5, 5) 改為 map(accelY, -200, 200, 5, -5) 可以反轉Y軸方向。
????????增大 deadZone 值可以減少抖動,增大 map 的輸出范圍(如-8~8)可以增加靈敏度。
Q3: 小球穿墻bug如何處理?
A:可能的原因:
????????小球移動速度(map輸出的值)設置過快,單幀移動距離超過了墻壁的厚度。嘗試減小 map 的輸出范圍(如改為-2~2),讓小球每幀移動慢一些。
項目資源:
? ? ? ??零知IDE:零知實驗室官網下載
????????ADXL362加速度計庫:ADXL362-master
? ? ? ? ADXL362數據手冊:ADXL362 (Rev.G)
????????通過實踐,我們掌握了如何驅動SPI顯示屏、讀取和處理加速度傳感器數據、設計高效的圖形刷新算法以及實現復雜的游戲碰撞邏輯

)


)
)







)

)



