一:MPU6050簡介
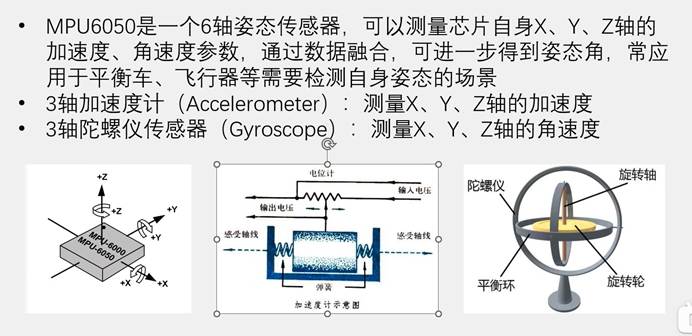
輸出一個隨姿態變化而變化的電壓,想要量化電壓,就得使用ADC轉化
歐拉角
偏航角(Yaw):也叫航向角,通常是繞 z 軸旋轉的角度,以 x 軸正向為起始邊,旋轉后 x 軸在 xOy 平面上的投影與起始邊的夾角就是偏航角,范圍一般是 [-π, π] 。例如,在飛機飛行中,偏航角表示飛機機頭相對于初始航向的左右偏轉角度。
俯仰角(Pitch):是繞 y 軸旋轉的角度,以 x 軸正向為起始邊,旋轉后 x 軸與 xOz 平面的夾角就是俯仰角,范圍一般是 [-π/2, π/2] 。對于飛機來說,俯仰角反映飛機機頭的上下仰俯程度。
滾轉角(Roll):繞 x 軸旋轉的角度,以 y 軸正向為起始邊,旋轉后 y 軸與 yOz 平面的夾角就是滾轉角,范圍一般是 [-π, π] 。比如飛機飛行時,機翼的傾斜狀態就由滾轉角體現。
加速度計具有靜態穩定性,不具備動態穩定性
陀螺儀具有動態穩定性,不具有靜態穩定性
兩組數據相互融合,就可以得到姿態角
參數
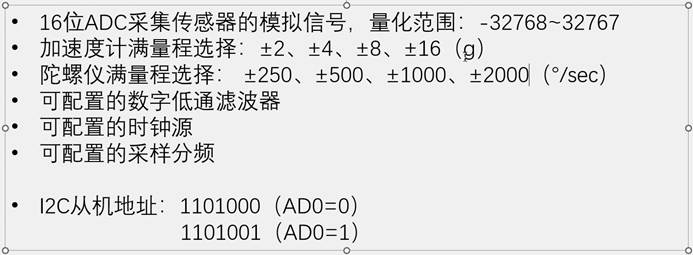
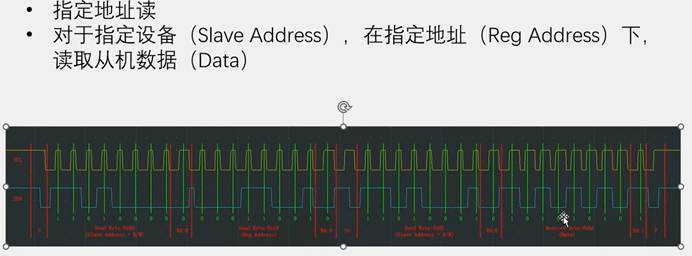
0X68為從機地址,左移一位 再 按位或上讀寫位(1/0)
把0X68左移一位后的數據作為,從機地址0XD0
讀0XD0 或上0X01記0XD1為讀
寫 0XD0 或上 0x00 記0XD0 為寫,就是把讀寫位融入從機地址
硬件電路圖
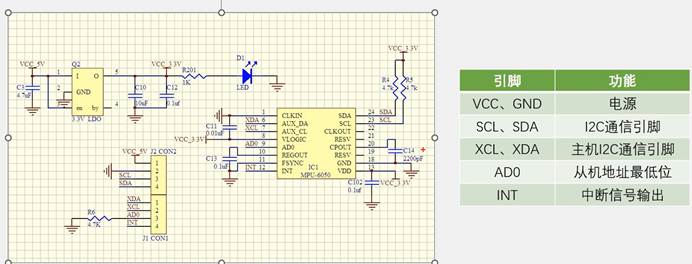
通信引腳(SDA/SCL、XDA/XCL)
SDA/SCL:主 I2C 總線,直連主機(如 STM32),支持掛載多設備(如磁場傳感器),簡化拓撲。
XDA/XCL:從 I2C 總線,用于級聯從設備,因控制復雜、效率低,實際少用,優先選 “多設備共 SDA/SCL” 方案。
?XCL 和XDA通常用于外接磁力計,或氣壓計,主機能直接讀取數據
?地址配置(AD0)
7 位從機地址由?AD0?電平決定:
AD0=0(默認下拉)→ 地址?0x68(二進制?1101000);AD0=1(接 VCC)→ 地址?0x69(二進制?1101001)。- 可通過改?
AD0?電平,實現同一總線掛多個 MPU6050(需硬件改引腳)。
?中斷引腳(INT)
- 功能豐富:支持 “數據就緒、I2C 錯誤、自由落體、零運動檢測” 等事件觸發。
- 價值:主機無需輪詢寄存器,靠中斷快速響應,適合低功耗 / 高實時性場景(如運動控制、傳感器融合)。
供電邏輯(VDD、VCC-5V、LDO)
- VDD:核心供電(2.375 - 3.46V),需精準穩壓,不可直連 5V。
- VCC-5V:寬壓輸入(3.3 - 5V),經板載 LDO 轉 3.3V 供內部電路,適配不同電源環境。
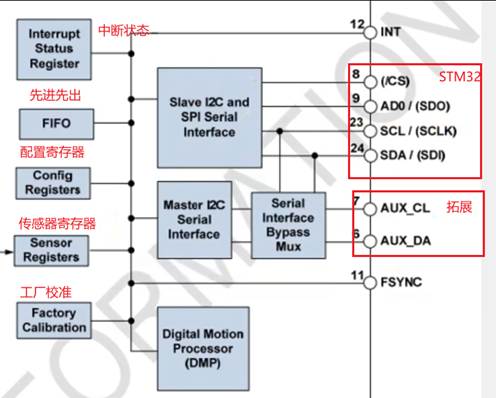
內部框圖
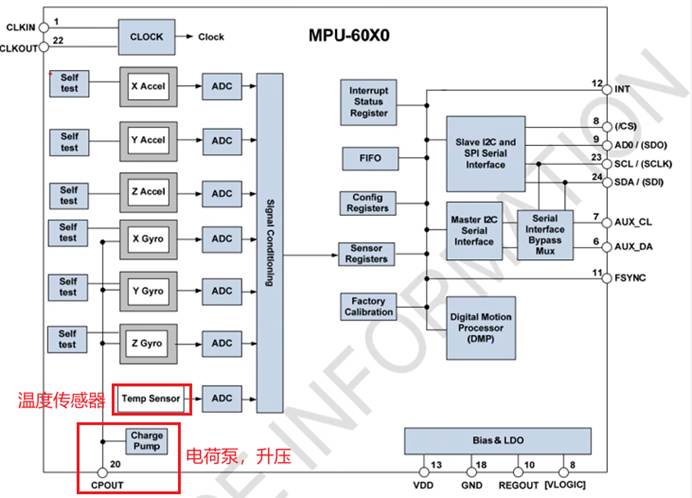
陀螺儀內部是需要高電壓支持的所以,用了電荷泵進行升壓
時鐘源一般選擇內置時鐘源,或者陀螺儀內部晶振時鐘
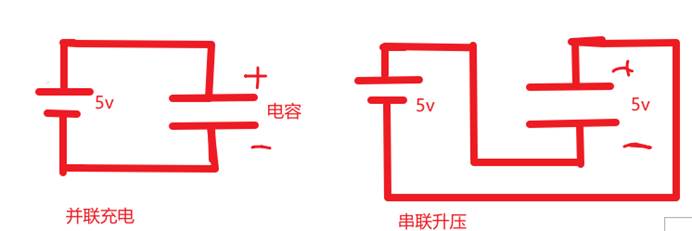
由于電容的電荷量少,所以需要充電和放電的過程來回轉化,就可以持續穩定升壓,再經過濾波器,就得到穩定的10v電壓
使用
寫字節時,要先解除睡眠模式
寄存器
運動傳感器

SMPLRT_DIV:采樣率分頻器 ,用于設置傳感器數據輸出的采樣率分頻系數,SMPLRT_DIV[7:0]表示該寄存器是 8 位可讀寫(RW)的,通過設置不同數值調整采樣率。
CONFIG:配置 ,EXT_SYNC_SET[2:0]用于設置外部同步輸入的配置,DLPF_CFG[2:0]是數字低通濾波器(Digital Low Pass Filter )配置,可設定濾波特性來處理信號噪聲等。
GYRO_CONFIG:陀螺儀配置 ,FS_SEL[1:0]用于選擇陀螺儀的滿量程范圍(Full Scale Select ),決定陀螺儀可測量的角速度范圍。
ACCEL_CONFIG:加速度計配置 ,XA_ST、YA_ST、ZA_ST分別是 X、Y、Z 軸的自測試(Self - Test )使能位;AFS_SEL[1:0]選擇加速度計的滿量程范圍(Accelerometer Full Scale Select );ACCEL_HPF[2:0]是加速度計高通濾波器(High Pass Filter )配置,用于過濾低頻信號。
慣性測量單元(如 MPU6050 等傳感器)的寄存器映射表
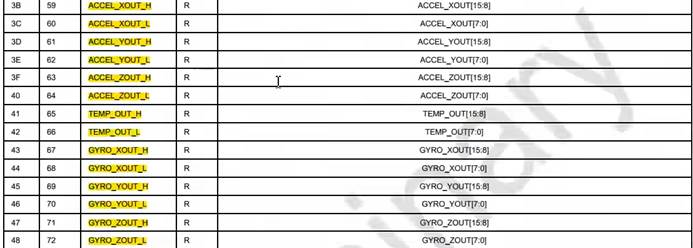
加速度計數據寄存器:ACCEL_XOUT_H/L、ACCEL_YOUT_H/L、ACCEL_ZOUT_H/L?,分別存儲 X、Y、Z 軸加速度測量值的高 8 位和低 8 位,拼接成 16 位數據反映加速度大小 。
溫度傳感器寄存器:TEMP_OUT_H/L?,存儲溫度測量值的高、低 8 位,組合為 16 位數據表示芯片溫度 .
陀螺儀數據寄存器:GYRO_XOUT_H/L、GYRO_YOUT_H/L、GYRO_ZOUT_H/L?,分別存儲 X、Y、Z 軸角速度測量值的高、低 8 位,拼接成 16 位數據體現角速度情況 ,這些寄存器用于讀取傳感器采集的運動、溫度數據 。
電源管理寄存器
![]()
PWR_MGMT_1(電源管理 1):可讀寫(RW),DEVICE_RESET用于設備復位;SLEEP控制睡眠模式;CYCLE使能循環模式;TEMP_DIS用于關閉溫度傳感器;CLKSEL[2:0]選擇系統時鐘源 。
PWR_MGMT_2(電源管理 2):可讀寫(RW),LP_WAKE_CTRL[1:0]配置低功耗喚醒控制;STBY_XA、STBY_YA、STBY_ZA分別使能加速度計 X、Y、Z 軸待機;STBY_XG、STBY_YG、STBY_ZG分別使能陀螺儀 X、Y、Z 軸待機 ,用于靈活控制傳感器各軸的功耗狀態 。
設備 ID 寄存器
![]()
WHO_AM_I:只讀(R)寄存器,WHO_AM_[6:1]存儲設備自身的標識 ID ,用于主機通過 I2C 等總線讀取,識別設備型號、判斷設備是否正常連接,是傳感器通信初始化時常用的 “設備身份確認” 寄存器?。
二:I2C
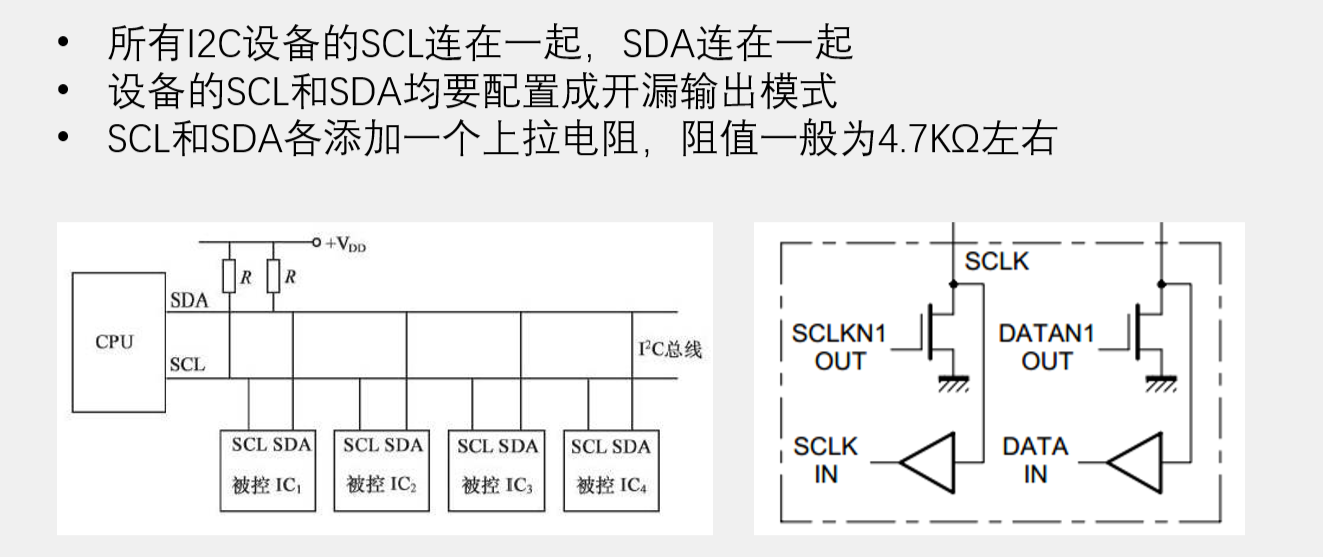
物理層特性
I2C 協議僅需要兩根線即可實現通信:
- SDA(Serial Data Line):串行數據線
- SCL(Serial Clock Line):串行時鐘線
這兩根線都需要通過上拉電阻連接到電源,因此當總線上的所有設備都不驅動總線時,總線會保持高電平狀態。這種設計使得多個設備可以共享同一總線,實現多主多從的通信架構。
數據傳輸格式
I2C 通信以字節(8 位)為基本單位進行數據傳輸,每個字節后面會跟隨一個應答位(ACK/NACK)。數據傳輸時,最高位(MSB)先發送。
通信流程通常包括:
- 起始信號(Start Condition)
- 從設備地址(7 位或 10 位)+ 讀寫位
- 應答位(ACK/NACK)
- 數據傳輸
- 停止信號(Stop Condition)
硬件
時序圖?
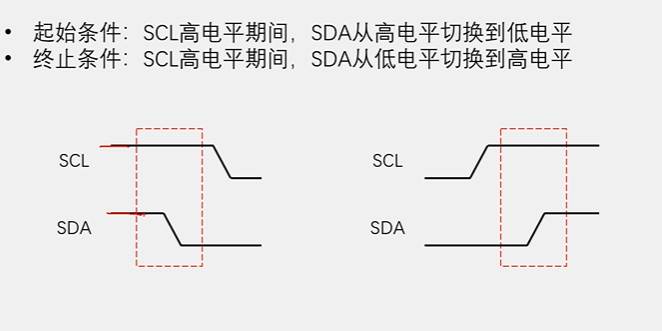
起始信號的核心是 “當 SCL 為高電平時,SDA 出現下降沿(從高到低的跳變)”。要產生這個下降沿,必須先讓 SDA 處于高電平狀態,再在 SCL 保持高電平期間將 SDA 拉低。
停止信號(Stop):當 SCL 為高電平時,SDA 由低電平變為高電平(上升沿),表示通信結束。
void MyI2C_Start(void)
{MyI2C_W_SDA(1);MyI2C_W_SCL(1);MyI2C_W_SDA(0);MyI2C_W_SCL(0);
}
void MyI2C_Stop(void)
{MyI2C_W_SDA(0);MyI2C_W_SCL(1);MyI2C_W_SDA(1);
}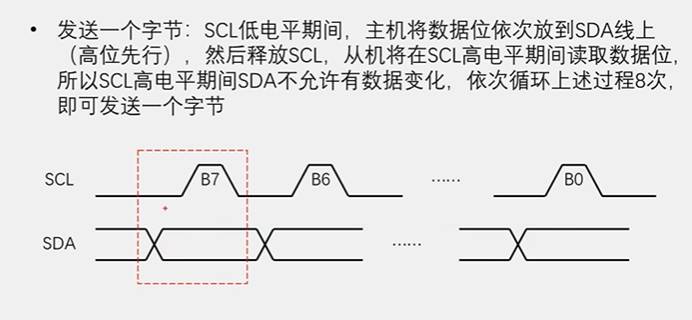
該函數通過循環逐位發送 8 位數據:先通過位運算將當前位輸出到 SDA 線,再拉高 SCL 讓從機讀取,最后拉低 SCL 準備下一位,按 I2C 時序完成 1 字節傳輸。?
void MyI2C_SendByte(uint8_t Byte)
{uint8_t i;for(i=0;i<8;i++){//傳遞8位數據,這樣寫方便MyI2C_W_SDA(Byte & (0x80>>i));MyI2C_W_SCL(1);MyI2C_W_SCL(0);}
}
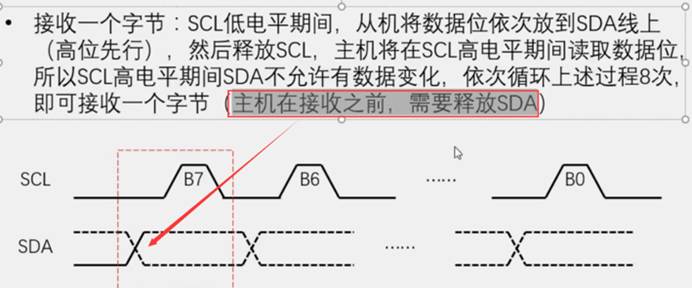 ?整個過程遵循 I2C 時序:SCL 高電平時讀取 SDA 數據,低電平時準備下一位,確保數據按位(高位優先)正確接收。
?整個過程遵循 I2C 時序:SCL 高電平時讀取 SDA 數據,低電平時準備下一位,確保數據按位(高位優先)正確接收。
uint8_t MyI2C_ReceiveByte(void)
{uint8_t i,Byte=0x00;MyI2C_W_SDA(1);//先釋放for(i=0;i<8;i++){MyI2C_W_SCL(1);if(MyI2C_R_SDA()==1) {Byte |=(0x80 >>i);}MyI2C_W_SCL(0);}return Byte;
}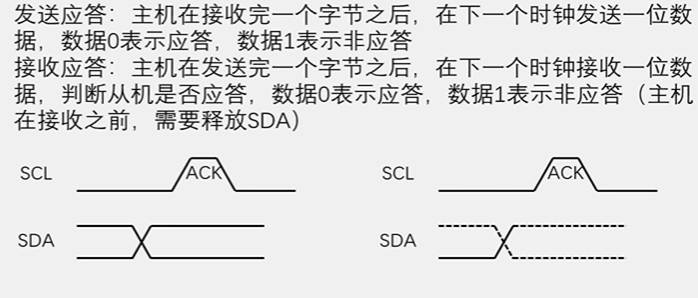
MyI2C_SendAck(uint8_t AckByte):發送應答信號:每傳輸 1 字節數據后,接收方必須發送應答信號。若發送 “非應答”(1),通常表示數據傳輸結束或接收失敗。
MyI2C_ReceiveAck(void):接收應答信號AckByte為 0 時表示接收成功,為 1 時表示接收失敗或需終止傳輸。?
void MyI2C_SendAck(uint8_t AckByte)
{MyI2C_W_SDA(AckByte);MyI2C_W_SCL(1);MyI2C_W_SCL(0);
}
uint8_t MyI2C_ReceiveAck(void)
{uint8_t i,AckByte=0x00;MyI2C_W_SDA(1);//先釋放MyI2C_W_SCL(1);AckByte=MyI2C_R_SDA();MyI2C_W_SCL(0);return AckByte;
}?三:MPU6050的邏輯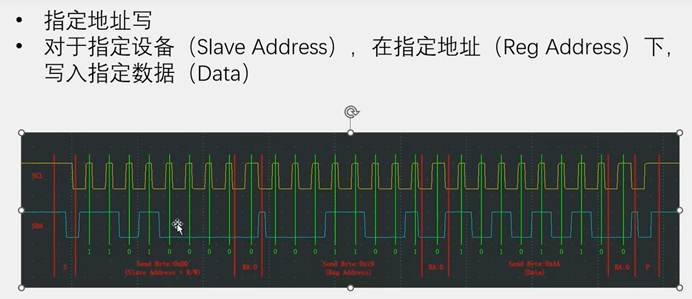
整個過程遵循 I2C “主設備寫從設備” 的標準流程:起始信號→設備地址(寫)→應答→寄存器地址→應答→數據→應答→停止信號,確保數據準確寫入 MPU6050 的目標寄存器?
void MPU6050_WriteReg(uint8_t RegAddress, uint8_t Data)
{MyI2C_Start();MyI2C_SendByte(MPU6050_ADDRESS);MyI2C_ReceiveAck();MyI2C_SendByte(RegAddress);MyI2C_ReceiveAck();MyI2C_SendByte(Data);MyI2C_ReceiveAck();MyI2C_Stop();
}
uint8_t MPU6050_ReadReg(uint8_t RegAddress)
{uint8_t Data;MyI2C_Start();MyI2C_SendByte(MPU6050_ADDRESS);MyI2C_ReceiveAck();MyI2C_SendByte(RegAddress);MyI2C_ReceiveAck();MyI2C_Start();MyI2C_SendByte(MPU6050_ADDRESS | 0x01);MyI2C_ReceiveAck();Data = MyI2C_ReceiveByte();MyI2C_SendAck(1);MyI2C_Stop();return Data;
}初始化
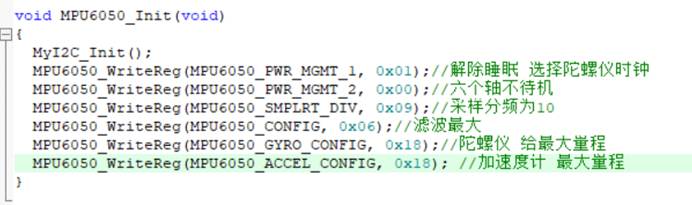
配置完后的檢測的數據都放到了相應的寄存器中
最后直接調用寄存器
void MPU6050_GetData(int16_t *AccX, int16_t *AccY, int16_t *AccZ, int16_t *GyroX, int16_t *GyroY, int16_t *GyroZ)
{uint8_t DataH, DataL;DataH = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_H);DataL = MPU6050_ReadReg(MPU6050_ACCEL_XOUT_L);*AccX = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_H);DataL = MPU6050_ReadReg(MPU6050_ACCEL_YOUT_L);*AccY = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_H);DataL = MPU6050_ReadReg(MPU6050_ACCEL_ZOUT_L);*AccZ = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_GYRO_XOUT_H);DataL = MPU6050_ReadReg(MPU6050_GYRO_XOUT_L);*GyroX = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_GYRO_YOUT_H);DataL = MPU6050_ReadReg(MPU6050_GYRO_YOUT_L);*GyroY = (DataH << 8) | DataL;DataH = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_H);DataL = MPU6050_ReadReg(MPU6050_GYRO_ZOUT_L);*GyroZ = (DataH << 8) | DataL;
}

動態內存分配與它的指針變量)


SmartWaterServer)







)

——基于 Spring Boot 實現動態路由加載:從數據庫到前端菜單的完整方案)



容器與模塊化工作原理)