1 單選題(每題 2 分,共 30 分)
第1題 已知小寫字母 b 的ASCII碼為98,下列C++代碼的輸出結果是(?? )。
- #include <iostream>
- using namespace std;
- int main() {
- ????char a = 'b' ^ 4;
- ????cout << a;
- ????return 0;
- }
A. b????????????????????????????????????B. bbbb?????????????????????????????? C. f???????????????? ? ? ? ? ? ? ? ? ? ? ? D. 102
解析:答案C。'b?'為字符型,等人價整型98,'b' ^ 4等價98 ^ 4 = 0b01100010 ^ 0b00000100 = 0b01100110 = 102。char a表示a為字符型,102將轉換為字符'f'。????所以C.正確。故選C。
第2題 已知 a 為 int 類型變量, p 為 int * 類型變量,下列賦值語句不符合語法的是(?? )。
A. *(p + a) = *p;???????????????? B. *(p - a) = a;??????????????????? C. p + a = p;???????????????????????? ? D. p = p + a;
解析:答案C。本題考察的是?指針運算的合法性?,關鍵點在于?指針變量是否可以用于賦值表達式的左側?。?A.?*(p + a) = *p;? ?合法?:*(p + a)?是對指針?p?偏移?a?后的地址解引用,并賦值?*p?的值,這是合法的指針運算和賦值操作。?B.?*(p - a) = a;? ?合法?:*(p - a)?是對指針?p?偏移?-a?后的地址解引用,并賦值為?a,這也是合法的指針運算和賦值操作。?C.?p + a = p;? ?非法:p + a?是一個?臨時計算的指針值(地址值)?,不能出現在賦值語句的左側(即不能作為左值),編譯器會報錯,因為表達式?p + a?的結果是?不可修改的臨時對象?。?D.?p = p + a;? ?合法?:對指針變量?p?進行偏移運算(p + a),并將結果賦值給?p,這是合法的指針運算和賦值操作。故選C。
第3題 下列關于C++類的說法,錯誤的是(?? )。
A. 如需要使用基類的指針釋放派生類對象,基類的析構函數應聲明為虛析構函數。
B. 構造派生類對象時,只調用派生類的構造函數,不會調用基類的構造函數。
C. 基類和派生類分別實現了同一個虛函數,派生類對象仍能夠調用基類的該方法。
D. 如果函數形參為基類指針,調用時可以傳入派生類指針作為實參。
解析:答案B。若基類析構函數?未聲明為虛析構函數?,通過基類指針釋放派生類對象時會導致?內存泄漏?(僅調用基類析構函數,派生類部分未被釋放),?虛析構函數?確保多態性析構的正確調用,所以A.正確。?構造派生類對象時,會先調用基類構造函數,再調用派生類構造函數?,若基類未定義默認構造函數,派生類構造時必須顯式初始化基類,所以B.錯誤。派生類通過?base::?顯式調用基類虛函數(如?base::Method()),或通過基類指針/引用調用(覆蓋后仍可訪問基類實現),?基類指針可以指向派生類對象?(多態性),因此傳入派生類指針作為基類指針的實參是合法的,所以D.正確。故選B。
第4題 下列C++代碼的輸出是(?? )。
- #include <iostream>
- using namespace std;
- int main() {
- ????int arr[5] = {2, 4, 6, 8, 10};
- ????int * p = arr + 2;
- ????cout << p[3] << endl;
- ????return 0;
- }
A. 6? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?B. 8
C. 編譯出錯,無法運行。??????????????????????????????????????? D. 不確定,可能發生運行時異常。
解析:答案D。arr是數組arr的首地址,即地址指向下標0,也就是元素2這個位置,int *p = arr + 2,指針p指向arr+2,即指向下標2,也就是元素6這個位置,這個位置相當于p[0],所以p[3]已超arr的范圍,結果不確定,所以D.正確。故選D。
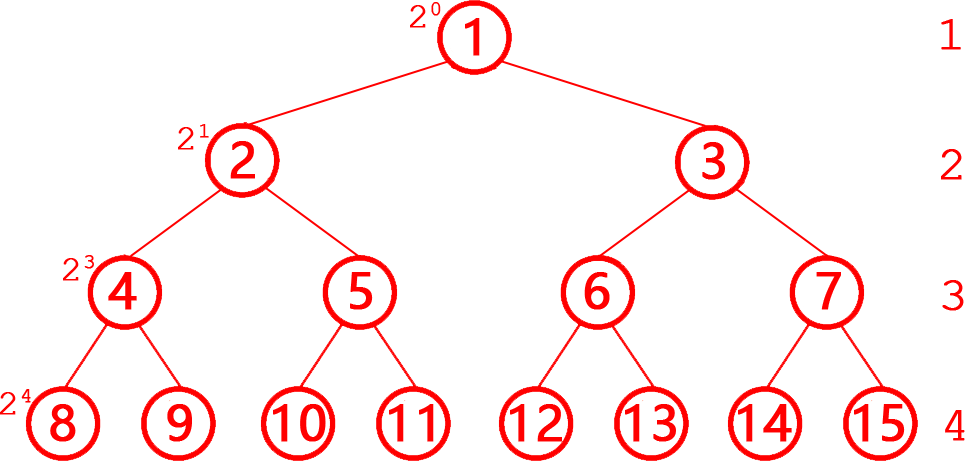
第5題 假定只有一個根節點的樹的深度為1,則一棵有N個節點的完全二叉樹,則樹的深度為(?? )。
A. ?log?(N)?+1??????????????????? B. ?log?(N)????????????????????????? C. ?log?(N)?????????????????????????????? D. 不能確定
解析:答案A。完全二叉樹每行的第1個節點的編號=為2層號-1,層號=log?編號+1,對整層的其他節點:層號=?log?編號?+1,對最后一層就是深度(參考下圖),所以對一棵有N個節點的完全二叉樹,如根節點的樹的深度為1,則樹的深度=?log?N?+1。故選A。
第6題 對于如下圖的二叉樹,說法正確的是(?? )。
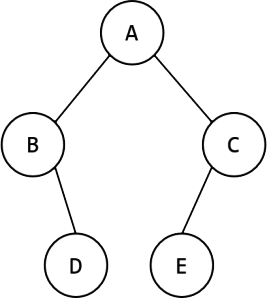
A. 先序遍歷是 ABDEC 。???????????????????????????????????????? B. 中序遍歷是 BDACE 。
C. 后序遍歷是 DBCEA 。???????????????????????????????????????? D. 廣度優先遍歷是 ABCDE 。
解析:答案D。先序遍歷是根-左樹-右樹,中序遍歷是左樹-根-右樹,后序遍歷是左樹-右樹-根,廣度優先遍歷是按層從上到下,每層從左到右。對本題圖中二叉樹:先序遍歷是ABDCE,A.錯誤;中序遍歷是BDAEC,B.錯誤;后序遍歷是DBECA,C.錯誤,廣度優先遍歷是ABCDE,D.正確。故選D。
第7題 圖的存儲和遍歷算法,下面說法錯誤的是(?? )。
A. 圖的深度優先遍歷須要借助隊列來完成。
B. 圖的深度優先遍歷和廣度優先遍歷對有向圖和無向圖都適用。
C. 使用鄰接矩陣存儲一個包含𝑣個頂點的有向圖,統計其邊數的時間復雜度為𝑂(𝑣2)。
D. 同一個圖分別使用出邊鄰接表和入邊鄰接表存儲,其邊結點個數相同。
解析:答案A。深度優先遍歷(DFS)通常使用?棧?(遞歸或顯式棧)實現,而廣度優先遍歷(BFS)才需要隊列,所以A.錯誤。兩種遍歷算法均適用于有向圖和無向圖,僅訪問順序和實現細節可能不同,所以正確。包含𝑣個頂點的有向圖的鄰接矩陣需要遍歷整個𝑣×𝑣矩陣才能統計邊數,時間復雜度為 𝑂(𝑣2),C.正確。無論出邊還是入邊鄰接表,每條邊均被存儲一次,僅方向不同,邊結點總數相同,D.正確。故選A。
第8題 一個連通的簡單有向圖,共有28條邊,則該圖至少有(?? )個頂點。
A. 5 ???????????????????????????????????? B. 6?????????????????????????????????????? C. 7??????????????????????????????????????????? D. 8
解析:答案B。對于?連通的簡單有向圖?,若共有28條邊,其最少頂點數的計算邏輯如下:
?對于簡單有向圖,若頂點數為𝑛,則最大邊數為𝑛 (𝑛?1)(每個頂點與其他?𝑛?1?個頂點各有一條有向邊)。題目要求邊數28,需滿足𝑛 (𝑛?1)≥28,即𝑛2?𝑛?28 ≥ 0,解方程![]() ≈5.82,因此最小的𝑛 =6。驗證:當n=8時,8×7=56≥28;當n=7時,7×6=42≥28;n=6?時,6×5=30≥28;當n=5?時,5×4=20<28(不滿足)。因此,?最少需要6個頂點?才能容納28條邊且保持連通性。?連通性約束:連通有向圖需保證至少n?1?條邊(如生成樹結構),但題目邊數(28)遠大于此下限,故頂點數由邊數上限決定為6。故選B。
≈5.82,因此最小的𝑛 =6。驗證:當n=8時,8×7=56≥28;當n=7時,7×6=42≥28;n=6?時,6×5=30≥28;當n=5?時,5×4=20<28(不滿足)。因此,?最少需要6個頂點?才能容納28條邊且保持連通性。?連通性約束:連通有向圖需保證至少n?1?條邊(如生成樹結構),但題目邊數(28)遠大于此下限,故頂點數由邊數上限決定為6。故選B。
第9題 以下哪個方案不能合理解決或緩解哈希表沖突(?? )。
A. 在每個哈希表項處,使用不同的哈希函數再建立一個哈希表,管理該表項的沖突元素。
B. 在每個哈希表項處,建立二叉排序樹,管理該表項的沖突元素。
C. 使用不同的哈希函數建立額外的哈希表,用來管理所有發生沖突的元素。
D. 覆蓋發生沖突的舊元素。
解析:答案D。在每個哈希表項處,用不同哈希函數再建一個哈希表管理沖突元素,但嵌套哈希表會顯著增加空間復雜度,且二次哈希函數的設計需保證不引發新的沖突,實現復雜,A.可以解決,但不算很理想。在每個哈希表項處建立二叉排序樹管理沖突元素,這是鏈地址法的優化變種,可提高查詢效率,B.可以解決。使用不同哈希函數建額外哈希表管理所有沖突元素,類似“再哈希法”,通過備用哈希函數分散沖突,是常見策略之一,可以解決。直接覆蓋沖突的舊元素,會導致數據丟失,違反哈希表完整性原則,無法解決沖突,所以D.不能解決。故選D。
第10題 以下關于動態規劃的說法中,錯誤的是(?? )。
A. 動態規劃方法通常能夠列出遞推公式。
B. 動態規劃方法的時間復雜度通常為狀態的個數。
C. 動態規劃方法有遞推和遞歸兩種實現形式。
D. 對很多問題,遞推實現和遞歸實現動態規劃方法的時間復雜度相當。
解析:答案B。動態規劃的核心是通過遞推公式(狀態轉移方程)描述子問題與原問題的關系,所以A.正確。動態規劃的時間復雜度取決于?狀態數量?與?每個狀態的計算復雜度?,通常為O(狀態數×單狀態計算復雜度),所以B.錯誤。?遞歸實現?(自頂向下):通過記憶化存儲避免重復計算,如斐波那契數列的遞歸解法;?遞推實現?(自底向上):通過迭代填充狀態表,如數塔問題的遞推解法,所以C.正確。兩種實現的時間復雜度通常相同,雖然遞歸會導致指數級別的時間復雜度,因為它會計算許多重復的子問題,但動態規劃會存儲子問題的結果,來降低復雜度,使其變成多項式級別,但遞歸可能因函數調用棧產生額外開銷,所以D.正確。故選B。
第11題 下面程序的輸出為(?? )。
- #include < iostream>
- using namespace std;
- int rec_fib[100];
- int fib(int n) {
- ????if (n <= 1)
- ????????return n;
- ????if (rec_fib[n] == 0)
- ????????rec_fib[n] = fib(n - 1) + fib(n - 2);
- ????return rec_fib[n];
- }
- int main() {
- ????cout << fib(6) << endl;
- ????return 0;
- }
A. 8?????????????????????????????????????? B. 13???????????????????????????????????? C. 64????????????????????????????????????????? D. 結果是隨機的
解析:答案A。本題程序實現了一個?帶記憶化(Memoization)的遞歸斐波那契數列計算?。斐波那契數列定義?:fib(0) = 0,fib(1) = 1;fib(n) = fib(n-1) + fib(n-2)(當?n > 1)。
全局數組?rec_fib?用于存儲已計算的斐波那契數,避免重復遞歸調用。若?rec_fib[n]?未被計算過(初始為0),則遞歸計算并存儲結果。計算結果:?fib(6)=fib(5)+ fib(4)=5+3=8。
具體遞歸展開如下:
fib(6) → fib(5) + fib(4) → 5 + 3 = 8
? fib(5) → fib(4) + fib(3) → 3 + 2 = 5?
? fib(4) → fib(3) + fib(2) → 2 + 1 = 3?
??? fib(3) → fib(2) + fib(1) → 1 + 1 = 2?
????? fib(2) → fib(1) + fib(0) → 1 + 0 = 1?
所以A.正確。故選A。
第 12 題 下面程序的時間復雜度為(?? )。
- int rec_fib[MAX_N];
- int fib(int n) {
- ????if (n <= 1)
- ????????return n;
- ????if (rec_fib[n] == 0)
- ????????rec_fib[n] = fib(n - 1) + fib(n - 2);
- ????return rec_fib[n];
- }
A. O(2?)??????????????????? ? ? ? ? B. O(𝜙?),![]() ? ? ? ? ? ? ?C. O(n2)? ? ? ? ? ? ? ? ? ? ? ? ? ? ? D. O(n)
? ? ? ? ? ? ?C. O(n2)? ? ? ? ? ? ? ? ? ? ? ? ? ? ? D. O(n)
解析:答案D。本題程序使用了?記憶化遞歸(Memoization)?來計算斐波那契數列,rec_fib[n]?數組存儲已經計算過的斐波那契數,避免重復計算。
每個?fib(k)(k ∈ [0, n])?僅計算一次?,后續直接查表返回,時間復雜度 ?O(1)?。
?計算?fib(n)?時,會依次計算?fib(n-1), fib(n-2), ..., fib(0),每個值只計算一次。
總共需要 ?n 次計算?(線性增長),因此時間復雜度為 ?O(n)?。普通遞歸的時間復雜度是 ?O(2?)?,因為會重復計算大量子問題。記憶化優化后,遞歸樹退化成?線性計算鏈?,復雜度降為 ?O(n)?。普通遞歸時間復雜度為O(2?)(或更精確的O(𝜙?),𝜙 = (√5 + 1)/2 ≈ 1.618),所以A.、B.錯誤。無O(n2)這種情況,C.錯誤。故選?D?。
第13題 下面 search 函數的平均時間復雜度為(?? )。
- int search(int n, int * p, int target) {
- ????int low = 0, high = n;
- ????while (low < high) {
- ????????int middle = (low + high) / 2;
- ????????if (target == p[middle]) {
- ????????????return middle;
- ????????} else if (target > p[middle]) {
- ????????????low = middle + 1; }
- ????????else {
- ????????????high = middle;
- ????????}
- ????}
- ????return -1;
- }
A. O(n log(n))??????????? ? ? ? ?B. O(n)??????????????????????? ? ? ?C. O(log(n)?????????? ? ? ? ? ? ?? D. O(1)
解析:答案C。本題的?search?函數明顯是?二分查找(Binary Search)?算法,其平均時間復雜度為 ?O(log n)。每次循環將搜索范圍縮小一半(middle = (low + high)/2),通過比較?target?與中間值決定向左或向右繼續搜索;若找到目標值則直接返回索引(第5-6行),否則調整?low?或?high?縮小范圍(第7-11行);每次迭代將數據規模?n減半,最壞情況下需迭代?log?n? 次才能確定結果。常見的分治排序算法、快速排序,其時間復雜度O(n log n),所以A.錯誤。適用于線性遍歷時間復雜度為?O(log n),而二分查找無需遍歷全部元素,所以B.錯誤。O(1)僅適用于哈希表等直接訪問操作,二分查找需多次比較,做不到O(1),所以D.錯誤。故選C。
?第 14 題 下面程序的時間復雜度為(?? )。
- int primes[MAXP], num = 0;
- bool isPrime[MAXN] = {false};
- void sieve() {
- ????for (int n = 2; n <= MAXN; n++) {
- ????????if (!isPrime[n])
- ????????????primes[num++] = n;
- ????????for (int i = 0; i < num && n * primes[i] <= MAXN; i++) {
- ????????????isPrime[n * primes[i]] = true;
- ????????????if (n % primes[i] == 0)
- ????????????????break;
- ????????}
- ????}
- }
A. O(n)????????????? ??? ? ? ? ?B. O(n×log n)????????????????????? C. O(n×log log n?????? ? ? ? ? ? ? ? D. O(n2)
解析:答案A。本題的程序實現的是?線性篩法(歐拉篩)?,用于高效生成素數,其時間復雜度為 ?O(n)?(線性復雜度)。外層循環(第 4 行)遍歷每個數?n(從 2 到?MAXN)。若?n?未被標記為非素數(!isPrime[n]),則將其加入素數表?primes(第 5-6 行)。內層循環(第 7-11 行)用當前素數?primes[i]?標記合數?n * primes[i],并在?n?能被?primes[i]?整除時提前終止(第 9-10 行),確保每個合數僅被標記一次。?每個合數僅被標記一次?:通過?if (n % primes[i] == 0) break?保證每個合數由其最小素因子標記,避免重復操作。雖然存在嵌套循環,但每個合數的標記操作均攤時間復雜度為 O(1),總操作次數與?MAXN?成線性關系。?對比?埃拉托斯特尼篩法(普通篩)?:時間復雜度 O(n log log n),存在重復標記。所以A.正確。故選A。
第15題 下列選項中,哪個不可能是下圖的廣度優先遍歷序列(?? )。
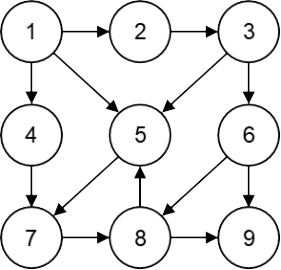
A. 1, 2, 4, 5, 3, 7, 6, 8, 9???????????????????????????????????????????????? B. 1, 2, 5, 4, 3, 7, 8, 6, 9
C. 1, 4, 5, 2, 7, 3, 8, 6, 9???????????????????????????????????????????????? D. 1, 5, 4, 2, 7, 3, 8, 6, 9
解析:答案B。根據廣度優先搜索(BFS)的特性,遍歷序列應按照層級順序逐層訪問節點,即從起始節點開始,先根節點入列,如有子節點(相鄰節點),則所有子節點(相鄰節點)壓入隊列,依此類推,直到最后一個節點。對A.:先壓入①,再壓入①的相鄰節點②、④、⑤,接著壓入②的相鄰節點③(⑤已在隊列)、④的相鄰節點⑦、⑤的相鄰節點無(⑦已在隊列),壓入③的相鄰節點⑥(⑤已在隊列)、⑦的相鄰節點⑧,最后是⑥的相鄰節點⑨。所以廣度優先遍歷序列1,2,4,5,3,7,6,8,9,所以A.正確。對B.:先壓入①,再壓入①的相鄰節點無②、⑤、④,接著壓入②的相鄰節點③(⑤已在隊列)、⑤的相鄰節點⑦、④的相鄰節點無(⑦已在隊列),壓入③的相鄰節點⑥(⑤已在隊列)、⑦的相鄰節點⑧,最后是⑥的相鄰節點⑨。所以廣度優先遍歷序列1,2,5,4,3,7,6,8,9,不可能出現1, 2, 5, 4, 3, 7, 8, 6, 9,8到達不了6,所以B.錯誤。對C.:先壓入①,再壓入①的相鄰節點無④、⑤、②,接著壓入④的相鄰節點⑦、⑤的相鄰節點無(⑦已在隊列)、②的相鄰節點③,壓入⑦的相鄰節點⑧、③的相鄰節點⑥(⑤已在隊列),最后是⑧的相鄰節點⑨。所以廣度優先遍歷序列1,4,5,2,7,3,8,6,9,所以C.正確。對D.:先壓入①,再壓入①的相鄰節點無⑤、④、②,接著壓入⑤的相鄰節點⑦、④的相鄰節點無(⑦已在隊列)、②的相鄰節點③,壓入⑦的相鄰節點⑧、③的相鄰節點⑥(⑤已在隊列),最后是⑧的相鄰節點⑨。所以廣度優先遍歷序列1,5,4,2,7,3,8,6,9,所以C.正確。故選B。
2 判斷題(每題 2 分,共 20 分)
第1題 C++語言中,表達式 9 & 12 的結果類型為 int 、值為 8 。(?? )
解析:答案正確。9 & 12 = 0b00001001 & 0b00001100 = 0b00001000 = 8。故正確。
第2題 C++語言中,指針變量指向的內存地址不一定都能夠合法訪問。(?? )
?解析:答案正確。在C++中,指針變量可以指向任意內存地址,但并非所有地址都能被程序合法訪問。如:?未初始化的指針?:指向隨機內存地址,訪問可能導致崩潰或數據損壞。?已釋放的內存(野指針)?:訪問delete或free后的內存屬于未定義行為。?空指針(NULL或nullptr)?:解引用空指針會直接引發段錯誤。?越界訪問?:如數組越界或緩沖區溢出,可能破壞其他數據。?系統保護區域?:嘗試訪問操作系統保留地址(如0x00000000)會觸發硬件異常。故正確。
第3題 對𝑛個元素的數組進行快速排序,最差情況的時間復雜度為𝑂(𝑛 log 𝑛)。(?? )
解析:答案錯誤。快速排序的最差時間復雜度為𝑂(𝑛2),而非𝑂(𝑛 log 𝑛)。故錯誤。
第4題 一般情況下, long long 類型占用的字節數比 float 類型多。(?? )
?解析:答案正確?。在大多數系統中,long long類型占用?8字節?,而float類型占用?4字節。long long類型,固定為8字節(64位),用于存儲大范圍整數(如?2?3 ~ 2?3?1)。?float類型?
固定為4字節(32位),采用IEEE 754浮點標準存儲,范圍約為±3.4×103?,但精度有限(約6~7位有效數字)。所以一般情況下long long類型占用的字節數比float類型多。故正確。
第5題 使用math.h或cmath頭文件中的函數,表達式pow(10, 3)的結果的值為1000、類型為int。(?? )
解析:答案錯誤。在C++中,pow(10, 3)?的結果是10的3次冪,即?1000?(103)。
?pow()函數原型?:double pow(double base, double exponent);
參數和返回值均為double類型,但整數參數(如10和3)會隱式轉換為double計算,所以實際輸出通常為1000.0,類型為double。故錯誤。
第6題 二叉排序樹的中序遍歷序列一定是有序的。(?? )
解析:答案正確。二叉排序樹的定義?:左子樹的所有節點值 ?小于? 當前節點值。右子樹的所有節點值 ?大于? 當前節點值。如下圖所示。
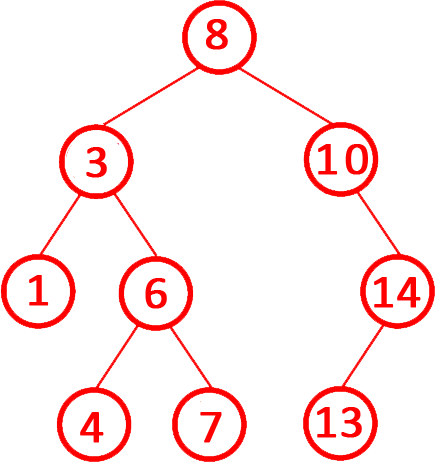
?中序遍歷(左-根-右)的特性?:先遍歷左子樹(所有值更小),再訪問根節點,最后遍歷右子樹(所有值更大)。因此,中序遍歷結果必然按?升序排列。故正確。
第7題 無論哈希表采用何種方式解決沖突,只要管理的元素足夠多,都無法避免沖突。(?? )
解析:答案正確。哈希函數將較大的輸入空間映射到有限的輸出空間(哈希表大小),根據鴿巢原理,當元素數量超過哈希表容量時,必然存在多個元素映射到同一位置,即沖突不可避免。即使采用鏈地址法或開放尋址法等策略,沖突僅被緩解或分散,無法從根本上消除。故正確。
第8題 在C++語言中,類的構造函數和析構函數均可以聲明為虛函數。(?? )
解析:答案錯誤。?在C++中,構造函數不能是虛函數?,因為虛函數依賴虛函數表(vtable)實現,而虛函數表在對象構造期間才被初始化。調用構造函數時,對象尚未完全創建,此時無法通過虛函數機制動態綁定。語法上,C++直接禁止構造函數聲明為virtual(編譯報錯)。?析構函數可以(且有時必須)是虛函數,其作用是當基類指針指向派生類對象時,若基類析構函數非虛,則通過該指針刪除對象會導致?派生類析構未被調用?,引發資源泄漏。故錯誤。
第9題 動態規劃方法將原問題分解為一個或多個相似的子問題,因此必須使用遞歸實現。(?? )
解析:答案錯誤。?動態規劃(Dynamic Programming, DP)的核心思想是通過將原問題分解為?重疊子問題?,并存儲子問題的解(記憶化)來避免重復計算,從而提高效率。?關鍵點?:子問題必須具有?重疊性?和?最優子結構?,但實現方式不限定于遞歸。?動態規劃的兩種實現方式?:?自頂向下(遞歸+記憶化)?:使用遞歸分解問題,并通過哈希表或數組緩存子問題的解(即“記憶化搜索”)。?自底向上(迭代)?:從最小子問題開始,通過迭代逐步構建更大問題的解(通常用數組或表格存儲狀態)。?遞歸并非必需?。故錯誤。
第10題 如果將城市視作頂點,公路視作邊,將城際公路網絡抽象為簡單圖,可以滿足城市間的車道級導航需求。(?? )
解析:答案錯誤。?將城市抽象為頂點、公路抽象為邊的簡單圖模型(無向、無權、無自環/重邊)無法精確表達車道級導航所需的細節,這是簡單圖的局限性?。車道級導航需包含?車道數量、轉向限制、實時交通狀態?等屬性,而簡單圖僅能表示城市間的連通性。?車道級導航的數據需求?:高精度導航依賴?動態權重?(如實時車速)、?車道級拓撲?(如出口車道標識)和?三維空間關系?(如高架橋分層),這些無法通過簡單圖的邊和頂點直接建模。故錯誤。
3 編程題(每題 25 分,共 50 分)
3.1 編程題1
- 試題名稱:線圖
- 時間限制:1.0 s
- 內存限制:512.0 MB
3.1.1 題目描述
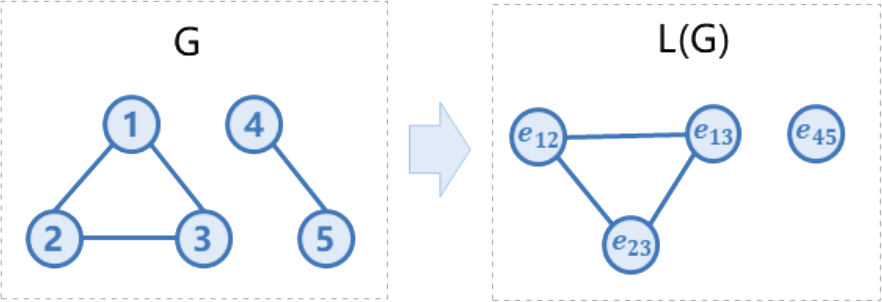
給定由𝑛個結點與𝑚條邊構成的簡單無向圖𝐺,結點依次以1,2,...,𝑛編號。簡單無向圖意味著 中不包含重邊與自環。𝐺的線圖𝐿(𝐺)通過以下方式構建:
初始時線圖𝐿(𝐺)為空。
對于無向圖𝐺中的一條邊,在線圖𝐺中加入與之對應的一個結點。
對于無向圖𝐺中兩條不同的邊(𝑢?,𝑣?),(𝑢?,𝑣?),若存在𝐺中的結點同時連接這兩條邊(即𝑢?,𝑣?之一與𝑢?,𝑣?之一相同),則在線圖𝐿(𝐺)中加入一條無向邊,連接(𝑢?,𝑣?),(𝑢?,𝑣?)在線圖中對應的結點。
請你求出線圖𝐿(𝐺)中所包含的無向邊的數量。
3.1.2 輸入格式
第一行,兩個正整數𝑛,𝑚,分別表示無向圖𝐺中的結點數與邊數。
接下來𝑚行,每行兩個正整數𝑢?,𝑣?,表示𝐺中連接𝑢?,𝑣?的一條無向邊。
3.1.3 輸出格式
輸出共一行,一個整數,表示線圖𝐿(𝐺)中所包含的無向邊的數量。
3.1.4 樣例
3.1.4.1 輸入樣例1
- 5 4
- 1 2
- 2 3
- 3 1
- 4 5
3.1.4.2 輸出樣例1
- 3
3.1.4.3 輸入樣例2
- 5 10
- 1 2
- 1 3
- 1 4
- 1 5
- 2 3
- 2 4
- 2 5
- 3 4
- 3 5
- 4 5
3.1.4.4 輸出樣例2
- 30
3.1.4.5 樣例解釋
3.1.5 數據范圍
對于60%的測試點,保證1≤𝑛≤500,1≤𝑚≤500。 對于所有測試點,保證1≤𝑛≤10?,1≤𝑚≤10?。
3.1.6 編寫程序思路
分析:設計思路與原理:?線圖定義:線圖L(G)?的頂點對應原圖G?的邊。若原圖G?中兩條邊共享一個公共頂點,則在線圖L(G)?中對應的頂點之間連一條邊。線圖的邊數等于原圖中所有共享公共頂點的邊對數。對于原圖的每個頂點u,其鄰接邊的數量為edge(u),貢獻的邊對數為![]() ?。構建鄰接表,記錄每個頂點的鄰接邊。遍歷每個頂點,計算其鄰接邊的組合數并累加。?時間復雜度?:鄰接表構建:O(m),組合數計算:O(n),總復雜度:O(n+m)。因為n≤10?,m≤10?,總復雜度在10?數量級,不會超時。完整參考程序代碼如下:
?。構建鄰接表,記錄每個頂點的鄰接邊。遍歷每個頂點,計算其鄰接邊的組合數并累加。?時間復雜度?:鄰接表構建:O(m),組合數計算:O(n),總復雜度:O(n+m)。因為n≤10?,m≤10?,總復雜度在10?數量級,不會超時。完整參考程序代碼如下:
#include <iostream>
using namespace std;const int MaxN = 1e5+10; //頂點編號n≤10?
int n, m, edge[MaxN];??? //頂點編號1~n,初始為0int main() {cin >> n >> m;for (int i = 1; i <= m; ++i) { //輸入m條邊u?,v?int u, v;cin >> u >> v;edge[u]++;? //頂點計數edge[v]++;? //頂點計數}long long edge_count = 0;? //防止大數溢出for (int u = 1; u <= n; ++u)edge_count += 1ll * edge[u] * (edge[u] - 1) / 2; //組合運算cout << edge_count << endl;return 0;
}3.2 編程題2
- 試題名稱:調味平衡
- 時間限制:1.0 s
- 內存限制:512.0 MB
3.2.1 題目描述
小A準備了𝑛種食材用來制作料理,這些食材依次以1,2,...,𝑛編號,第i種食材的酸度為a?,甜度為b?。對于每種食材,小A可以選擇將其放入料理,或者不放入料理。料理的酸度𝐴為放入食材的酸度之和,甜度𝐵為放入食材的甜度之和。如果料理的酸度與甜度相等,那么料理的調味是平衡的。 過于清淡的料理并不好吃,因此小A想在滿足料理調味平衡的前提下,合理選擇食材,最大化料理的酸度與甜度之和。你能幫他求出在調味平衡的前提下,料理酸度與甜度之和的最大值嗎?
3.2.2 輸入格式
第一行,一個正整數𝑛,表示食材種類數量。
接下來𝑛行,每行兩個正整數a?, b?,表示食材的酸度與甜度。
3.2.3 輸出格式
輸出共一行,一個整數,表示在調味平衡的前提下,料理酸度與甜度之和的最大值。
3.2.4 樣例
3.2.4.1 輸入樣例1
- 3
- 1 2
- 2 4
- 3 2
3.2.4.2 輸出樣例1
- 8
3.2.4.3 輸入樣例2
- 5
- 1 1
- 2 3
- 6 1
- 8 2
- 5 7
3.2.4.4 輸出樣例2
- 2
3.2.5 數據范圍
對于40%的測試點,保證1≤𝑛≤10,1≤a?, b?≤10。
對于另外20%的測試點,保證1≤𝑛≤50,1≤a?, b?≤10。
對于所有測試點,保證1≤𝑛≤100,1≤a?, b?≤500。
3.2.6 編寫程序思路
方法一:用vector(可變數組存放料理酸度與甜度, 不會vector也可用結構體struct)。需要選擇若干食材,使得它們的總酸度等于總甜度(A = B),同時最大化A + B(即2A或2B)。
這是一個典型的?動態規劃?問題,可以轉化為?背包問題?的變種:我們需要跟蹤酸度和甜度的差值(A - B),并記錄對應的最大總和(A + B)。用?動態規劃設計,?狀態定義?:dp[d]?表示酸度與甜度之差為?d?時的最大總和(A + B)。?初始化?:dp[0] = 0(差值為0時總和為0),其他狀態初始化為負無窮(表示不可達)。?狀態轉移?:對于每個食材,更新所有可能的差值?d:
如果選擇該食材,新的差值為?d + (a? - b?),新的總和為?dp[d] + a? + b?。不選擇則保持原狀態。偏移量處理?:由于差值可能為負,使用偏移量將差值映射到非負范圍。?復雜度優化?,使用滾動數組或一維數組優化空間復雜度。差值范圍限制在?[-sum(a? + b?), sum(a? + b?)]?內,避免無效計算。時間復雜度O(n*MAX_DIFF)=100*105*505*2≈10?,不會超時。完整參考程序代碼如下:
#include?<iostream>
#include?<vector>
using?namespace?std;const?int?MAX_DIFF?=?105?*?505?*?2;?//n*a*2,最大可能差值范圍
const?int?OFFSET?=?MAX_DIFF?/?2;????//偏移量處理負值(中心點)int?main()?{ios::sync_with_stdio(false);?//即取消緩沖區同步,cin、cout效率接近scanf、printfcin.tie(nullptr);????????????//解除cin和cout之間的綁定,進一步加快執行效率int?n;cin?>>?n;vector<pair<int,?int?>>?items(n);?//pair成對數據.first存酸度a、.second存甜度bfor?(int?i?=?0;?i?<?n;?++i)?{cin?>>?items[i].first?>>?items[i].second;?//輸入n個酸度、甜度對}vector<int>?dp(MAX_DIFF?+?1,?-1000);?//1≤a?,b?≤500。a?-b?≥-499dp[OFFSET]?=?0;?//?初始狀態:差值為0時和為0for?(const?auto&?item?:?items)?{int?a?=?item.first,?b?=?item.second;int?diff?=?a?-?b;vector<int>?new_dp?=?dp;?//拷貝創建new_dp,dp的所有元素復制到new_dpfor?(int?j?=?0;?j?<=?MAX_DIFF;?++j)?{if?(dp[j]?!=?-1000)?{int?new_j?=?j?+?diff;if?(new_j?>=?0?&&?new_j?<=?MAX_DIFF)?{if?(new_dp[new_j]?<?dp[j]?+?a?+?b)?{new_dp[new_j]?=?dp[j]?+?a?+?b;}}}}dp?=?move(new_dp);?//資源所有權的轉移給dp,new_dp.size()=0}cout?<<?max(0,?dp[OFFSET])?<<?endl;return?0;
}方法二:用一個動態規劃算法,主要功能是處理輸入數據并計算特定條件下的最大值。數組dp[MAX_DIFF+1]初始化為極小值(-16843010<-499),僅dp[OFFSET]初始化為0,作為動態規劃的起點。核心算法:先讀取n對整數(a,b),計算addt=a+b和subt=a-b?,根據subt值的正負采用不同的遍歷方向:subt≤0時正向遍歷更新dp數組,subt>0時逆向遍歷更新dp數組,通過max(dp[j+subt], dp[j]+addt)實現狀態轉移,記錄最大值,?輸出結果為最終輸出dp[OFFSET]的值,即中心位置的計算結果?。使用動態規劃思想,通過狀態轉移方程更新數組值?;采用雙指針技巧處理不同方向的遍歷需求。時間復雜度O(n*n*a*2)=100*105*505*2?≈10?,不會超時。完整參考程序代碼如下:
?#include <iostream>
#include <cstring> //含memset()函數
using namespace std;const int MAX_DIFF = 105 * 505 * 2; //n*a*2,最大可能差值范圍
const int OFFSET = MAX_DIFF / 2;??? //偏移量處理負值(中心點)int main() {ios::sync_with_stdio(false); //即取消緩沖區同步,cin、cout效率接近scanf、printfcin.tie(nullptr);??????????? //解除cin和cout之間的綁定,進一步加快執行效率int n;cin >> n;int dp[MAX_DIFF + 1]; //1≤a?,b?≤500。a?-b?≥-499memset(dp, -2, sizeof(dp)); //初始化為-16843010。0b11111110111111101111111011111110dp[OFFSET] = 0; // 初始狀態:差值為0時和為0for (int i = 0; i < n; ++i) {int a, b;cin >> a >> b;????????????????? //輸入n個數據對int addt = a + b, sunt = a - b; //求和及差if (sunt <= 0)?? //小于等于0,正向遍歷for (int j = -sunt; j <= MAX_DIFF; ++j)dp[j + sunt] = max(dp[j + sunt], dp[j] + addt);else???????????? //否則大于0,逆向遍歷for (int j = MAX_DIFF - sunt - 1; j; j--)dp[j + sunt] = max(dp[j + sunt], dp[j] + addt);}cout << max(0, dp[OFFSET]) << endl;return 0;
}





)

)










