摘要
近年來,隨著人口老齡化問題的加重,常年臥床的老年人數增多,同時因為各種疾病的原因,患肢體功能障礙的人數也在增加。嚴重影響著患者的生活質量,同時給社會和家庭增加了很多麻煩。他們迫切希望盡快康復,回歸健康的生活。
基于病人的需求,結合國內外的發展現狀,本文提出了一種新型的床上肢體康復機器人結構,將康復運動和床結合在一起,讓病患者只需要躺在床上就可以完成肢體的康復運動,盡快擺脫病魔。與此同時,床上肢體康復機器人不會疲勞,可以完整準確的完成一系列的康復運動,降低了人力資源的損耗,還可以改善患者的心肺功能,減少肌肉萎縮防止長期臥床帶來的并發癥,同時減少腦部患者的后遺癥,幫助患者更好的生活。
論文采用模塊化的設計思想,首先分析了人體的生理結構和運動特點,簡化了人體四肢的自由度,規劃機器人的康復訓練空間,完成了上下肢的運動分析和康復模塊的設計,上肢采用的是五桿機構,可以實現兩個自由度的運動,幫助患者進行上肢康復。下肢使用的是曲柄滑塊機構,一個自由度,實現患者的下肢鍛煉。最后使用solidworks軟件完成了床上肢體康復機器人的三維結構設計。使用ansys有限元分析軟件完成強度分析和機器人的結構改進。使得所設計床上肢體康復機器人能更好的滿足患者的需求。可以更好的幫助患者回歸社會。
關鍵詞:康復機器人;結構設計;運動分析;有限元分析;
目 ?錄
摘要?? ?I
Abstract?? ?II
1 ?緒論?? ?1
1.1 ?選題背景及意義?? ?1
1.2 ?國內外研究現狀與發展趨勢?? ?2
1.2.1 ?國外研究現狀?? ?2
1.2.2 ?國內研究現狀?? ?4
1.3 ?研究內容?? ?5
2 ?床上肢體康復機器人的總體方案設計?? ?6
2.1 ?人體上肢運動特點分析?? ?6
2.2 ?人體下肢運動特點分析?? ?7
2.3 ?人體各關節間尺寸范圍?? ?8
2.4 ?床上肢體康復機器人的總體方案?? ?9
2.5 ?本章小結?? ?10
3 ?床上肢體康復機器人的主體結構設計?? ?11
3.1 ?上肢運動分析?? ?11
3.2 ?上肢康復模塊的機構設計?? ?11
3.2.1 ?上肢機構設計?? ?11
3.2.2 ?上肢機構電機的選型?? ?12
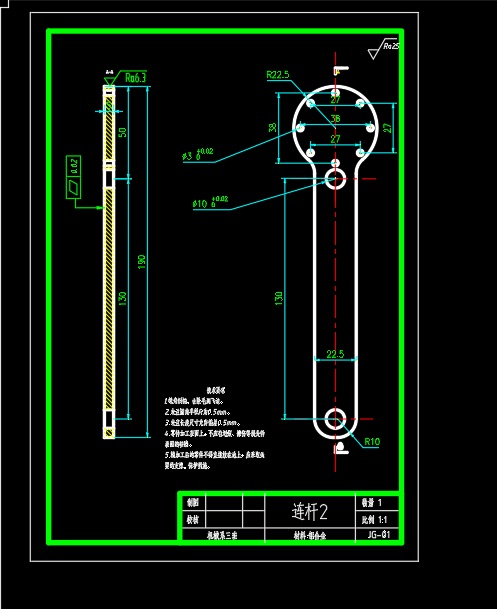
3.2.3 ?連桿的設計及校核?? ?13
3.3 ?下肢運動分析?? ?15
3.4 ?下肢康復模塊的機構設計?? ?16
3.4.1 ?下肢電機的選型計算?? ?17
3.4.2 ?下肢中心轉軸的設計及校核?? ?18
3.4.3 ?下肢軸承的選型及校核?? ?21
3.4.4 ?直線導軌的選型及校核?? ?22
3.5 ?本章小結?? ?23
4 ?床上肢體康復機器人多體位變化模塊的結構設計?? ?24
4.1 ?多體位變化模塊的驅動方式設計?? ?24
4.2 ?多體位變化模塊的移動平臺設計?? ?25
4.3 ?多體位變化模塊的姿態變化平臺設計?? ?27
4.4 ?本章小結?? ?28
5 ?仿真驗證與分析?? ?29
5.1 ?Solidworks軟件?? ?29
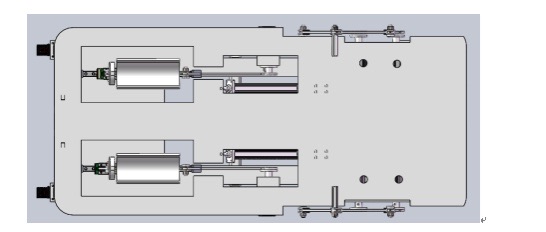
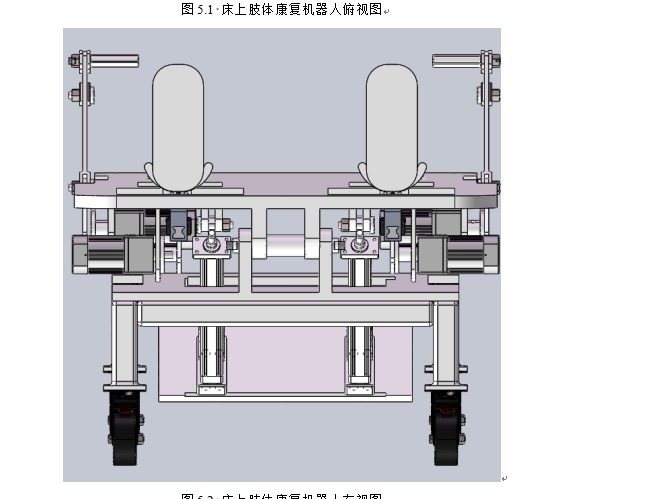
5.2 ?床上肢體康復機器人三維建模?? ?30
5.3 ?關鍵零部件的有限元分析?? ?31
5.3.1 ?Ansys workbench?? ?31
5.3.2 ?材料的選擇?? ?33
5.3.3 ?床體的有限元分析?? ?34
5.3.4 ?連桿的有限元分析?? ?34
5.3.5 ?軸的有限元分析?? ?36
6 ?總結與展望?? ?37
6.1 ?總結?? ?37
6.2 ?展望?? ?37
參考文獻?? ?38
致 ?謝?? ?40
附錄A?? ?41
附錄B?? ?45
1 ?緒論
1.1 ?選題背景及意義
隨著我國經濟的快速發展,人們的生活水平也得到了比較大的提升,人們的飲食結構和工作方式的變化,使得越來越多的人養成了不好的生活習慣。同時隨著計算機技術的發展,大多數的工作都需要使用計算機來完成,越來越多的人開始習慣于久坐不動的工作,很少進行體育鍛煉。與此同時,每年都有很多人因為疾病或者車禍造成的高位截癱患者,需要長期臥床休養。隨著年齡的增長,這些生活方式將增加患病的風險,例如高血壓等腦血管疾病,這些疾病會給病人造成運動失調等后遺癥,影響其生活的質量。醫學研究表明,除了一些很有必要的醫學手段進行治療以為,正確的康復訓練對患者的上肢和下肢的康復也有一定的好處[1]。
雖然肢體運動障礙患者需要接受必要的康復訓練,但是我國目前在醫療康復訓練方面的服務還不能滿足患者的需求[2]。在發達國家每10萬人口中就有5位康復醫師,而在我國每10萬人口中僅有0.4位康復醫師。據統計,在我國各級醫院中共需要大概100萬的醫療康復類人才,是現有數量的10倍,同時隨著我國人口老齡化的趨勢加重,需要更多的醫療康復類人才。僅僅依靠現有的康復手段遠遠不能滿足未來康復醫療行業的需求,因此,基于運動康復理論,通過分析人體的結構特點,利用人體的生理特點,設計一種可以用于患者在床上進行上肢和下肢康復動作的康復醫療床具有極其重要的意義[3]。設計的上下肢康復機構可以幫助患者進行康復鍛煉。肢體康復機器人訓練系統不僅可以為患者提供安全可靠的肢體康復訓練,還可以改善患者的心肺功能,減少肌肉萎縮防止長期臥床帶來的并發癥,同時減少腦部患者的后遺癥,幫助患者更好的生活[4]。
目前市面上比較常見的床上肢體 康復機器人存在的主要問題就是沒有同時集成上肢和下肢的運動康復,只有實現上肢的康復鍛煉儀器,或者單獨鍛煉下肢的康復鍛煉儀器,沒有同時在一張床上上肢和下肢同時鍛煉的儀器[5]。因此在這樣的背景下,本文設計了一種新型的床上肢體康復機器人[6]。
本文設計了一種可以幫助床上患者進行康復訓練的床上肢體康復機器人,首先對人體的生理結構特點進行分析,簡化人體自由度,規劃機器人的康復訓練空間,以保證患者在訓練過程中的安全性。在滿足人類生理結構的基礎上,提出了床上肢體康復機器人的整體結構設計,其次根據人體的結構和自由度分配要求完成主要零部件的結構仿真分析,完成三維模型的結構設計,使用有限元分析軟件完成強度分析和機器人的結構改進。使得所設計床上肢體康復機器人能更好的滿足患者的需求。床上肢體康復機器人可以更好的幫助患者回歸社會,因此床上肢體康復機器人的設計具有很大的市場前景和研究意義。
1.2 ?國內外研究現狀與發展趨勢
從上世紀60年代開始,就存在讓康復機器人為醫療患者服務的先例,隨著科技的發展,醫療康復機器人逐步進入人們的視野。在肢體康復機器人研究領域,全球的大部分研究中心都位于美國、加拿大等眾多發達國家內,直到上世紀90年代,國內一些機構才開始致力于康復機器人的設計研發領域[7]。到目前為止,醫療康復機器人行業進入全面發展的時期。隨著技術的發展,康復機器人將創造更好的醫療效果和商業利益[8]。
1.2.1 ?國外研究現狀
二十世紀初,國外的一家從事醫療器械設計生產的Hocoma公司,設計研發了一款專用于下肢康復機器人,如圖1.1所示。該款康復機器人最大的特點是可以讓患者在進行康復訓練的時候,可以躺在床上進行訓練,這樣避免在進行康復訓練的時候肢體患者出現二次傷害,設計的床上下肢康復機器人的床身可以任意的進行調節,同時在鍛煉的患者胸部安裝有一個安全裝置,主要是實現對患者的保護作用。床身的下方位置安裝有腳踏板,腳踏板上安裝有彈簧,當患者的腳踩在彈簧上時,腳踏板可以根據患者的踩踏角度實現腳部踝關節的調節和訓練,從而完成下肢的康復治療[10]。
 ?
?
 ?
?
 ?
?
 ?
?
 ?
?
?
CA1區域(dCA1)的時間細胞對NLP中的深層語義分析的積極影響和啟示)
全定制設計進階)

)









 降低版本,涉及兼容性問題)




生成!)
