| 序號 | 地圖類型 | 概述 |
|---|---|---|
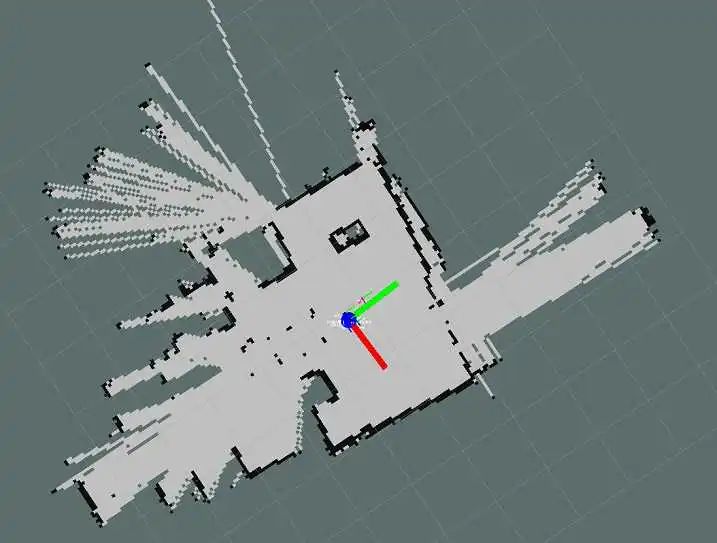
| 1 | 格柵地圖 | 將現實環境柵格化,每一個柵格用 0 和 1 分別表示空閑和占據狀態,初始化為未知狀態 0.5 |
| 2 | 特征地圖 | 以點、線、面等幾何特征來描繪周圍環境,將采集的信息進行篩選和提取得到關鍵幾何特征 |
| 3 | 拓撲地圖 | 將重要部分抽象為地圖,使用簡單的圖形表示環境中的物體信息,相對關系表示為節點與連接線的拓撲圖 |
| 4 | 點云地圖 | 利用掃描到的離散點的集合,直觀地描述周圍環境地圖的原始幾何信息 |
| 5 | 語義地圖 | 利用神經網絡進行點云的語義分割,地圖融合語義標簽,強調地圖各對象間的描述性 |
1. 格柵地圖:因更新速度快,帶有鮮明的顏色區分,多用在機器人的自主導航。
2. 特征地圖:因占用空間小、計算量少,適用于走廊、辦公室等相對結構化




)




—2D平行束投影公式)




——概述)
-變量)



?)