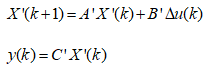
考慮擴展狀態空間形式
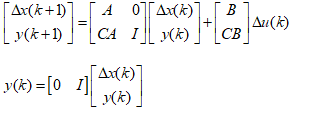
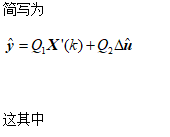
縮寫為
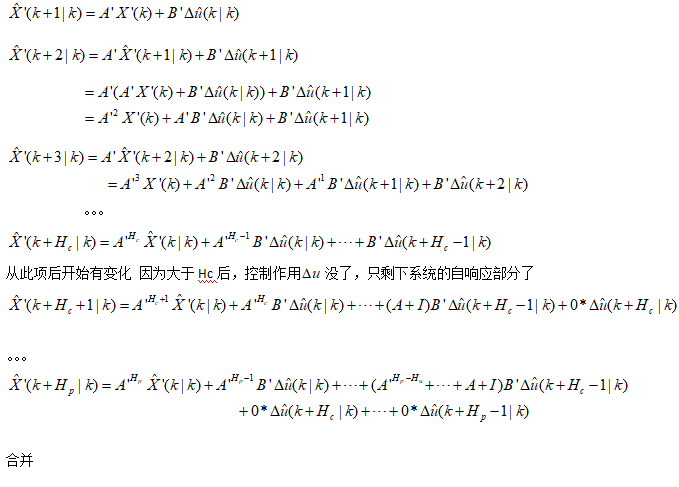
對于未來的預測,這里要注意,默認了最小預測時域為1,如果不為1,從k+1到k++最小預測時域的x的預測為0

模型預測控制matlab運行代碼,可實現模型預測控制。
StateMPC是按照錢積新版《預測控制》中4.3.2.1節的方法編寫的程序。
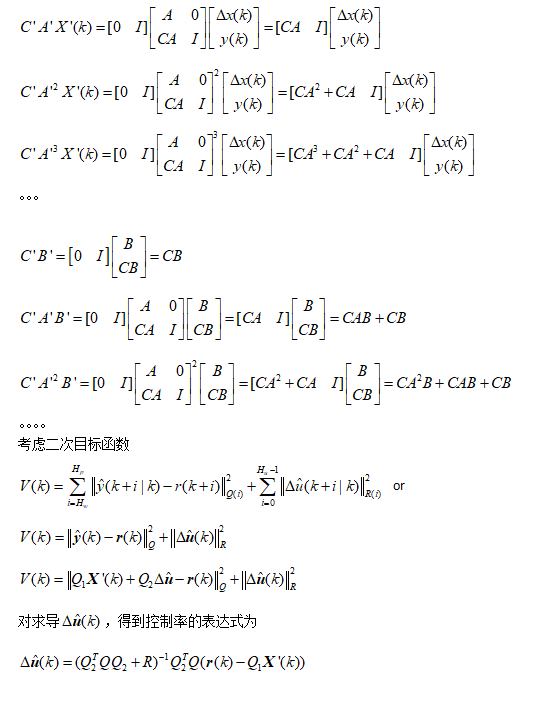
StateMPC1是按照公式4-61,4-62擴展狀態空間模型而編寫的程序。基于這個模型的控制率的推導請見文件夾里的word文件。
MIMO文件是從網上下載的多入多出系統的state mpc程序。控制率的求解與StateMPC1不同,因為沒有說明所以沒看懂。
壓縮包中是從網上下載的另外一個程序

)


?)








—芯片封裝中的開爾文源極)


,圖解超贊超詳細!!!)
)

