摘要——在本文中,我們研究了集成感知與通信(ISAC)系統的聯合接收機設計,其中通信信號和目標回波信號同時被接收和處理,以在兩種功能之間實現平衡性能。特別地,我們提出了兩種設計方案來解決聯合感知和通信問題中的接收信號處理。第一種方案基于最大似然(ML)檢測、最小均方誤差(MMSE)估計和干擾消除(IC),而第二種方案提出了一種針對目標估計的定制MMSE估計器,該估計器獨立于檢測器,從而形成了一種非IC設計。我們表明,將通信信號星座的結構信息納入考慮后,非IC方法優于IC方法并實現最優性能。數值結果驗證了所提出的最優設計的有效性。
索引詞——集成感知與通信、最大似然、干擾消除、最小均方誤差。
I. 引言
隨著數十年的發展,無線網絡現在正走向下一代,即5G-Advanced(5G-A)和6G。一方面,大量新興的5G-A和6G應用,如車聯網(V2X)和智慧城市,需要同時具備通信功能和無線電感知能力[1]。另一方面,感知和通信(S&C)系統正朝著更高頻段和更大天線陣列發展,導致硬件架構和信號處理上的顯著相似性[2]。由于技術趨勢和商業需求,集成感知與通信(ISAC)被視為下一代無線網絡的有前途的技術,并已經受到了工業界和學術界的廣泛研究關注。
現有的ISAC信號處理方法主要集中在發射端設計,即ISAC波束形成和波形設計[3]、[4]。然而,關于ISAC系統接收信號處理的文獻卻相對有限。一般來說,ISAC接收機應能夠從通信信號中解碼有用信息,同時從回波中估計目標的狀態/與目標相關的參數。這兩項任務可能同時發生,導致ISAC系統設計中出現嚴重的相互干擾和挑戰。實際上,同時進行的通信數據解碼和目標感知可以被建模為一個聯合檢測和估計問題,這在統計推斷領域已有研究[5]、[6]。然而,將這些研究中的結果直接應用于ISAC接收機設計可能并不適合,因為雷達中的目標檢測和通信中的符號檢測之間存在根本差異。以前的研究主要集中在目標檢測上,涉及確定目標是否存在,這通常使用奈曼-皮爾遜準則作為二元假設檢驗問題來解決。然而,在ISAC場景中,檢測問題通常是通信符號檢測,涉及多假設檢驗問題,而NP準則并不常用。
與本文更相關的是,最近[7]和[8]中的研究探討了雷達干擾下的通信符號解碼,其中雷達信號的特定結構,如恒模和稀疏性,被利用來促進干擾消除和符號檢測,這依賴于干擾消除(IC)方法。盡管各種IC技術在多用戶檢測中被廣泛用于通信接收機并被證明可以大大提高通信性能[9],但它在ISAC接收機中是否有類似應用尚不清楚。
受上述研究的啟發,我們的目標是為多輸入多輸出(MIMO) ISAC接收機設計聯合通信和感知方案。具體而言,本文考慮了一個MIMO-ISAC基站(BS),它同時處理來自通信用戶的上行信號和來自目標的回波信號。我們首先基于IC技術設計一個簡單的ISAC接收機,該接收機為通信功能實現最佳性能,但對感知而言是次優的。為了提高感知性能,我們提出了另一種基于最小均方誤差(MMSE)估計的目標估計方案,其中充分利用了通信星座的結構信息。此外,我們提供了所提出方案的相關性能分析,其中比特錯誤率(BER)和均方誤差(MSE)被采用作為通信和感知的性能指標。最后,我們提供數值結果來驗證所提出的ISAC接收機設計的有效性。我們的結果表明,IC操作相比其MMSE對應方案會導致感知性能下降,因為它忽略了通信信號的結構信息。
II. 系統模型
我們考慮一個配備有個發射天線和
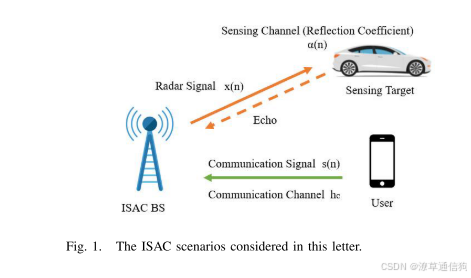
個接收天線的MIMO ISAC基站(BS),它在服務上行單天線用戶的同時,作為單靜態雷達檢測單個目標,如圖1所示。
令為用戶發送并被基站接收的上行通信信號的第
個樣本,
。ISAC基站接收到的通信信號向量由下式給出:
txSig_UE = pskmod(data_UE, M, phase_shift);
h_c = sqrt(beta) * sqrt(1/2) * (randn(NRx(nrx), L) + 1i * randn(NRx(nrx), L));
Comm_Rx = h_c(:, jj) .* txSig_UE(:, jj)+ noise;其中是上行單輸入多輸出(SIMO)通信信道向量,假定通過導頻訓練完全為基站所知,而
表示加性白高斯噪聲(AWGN)向量。
令為基站發送的雷達信號的第
個樣本,
為發射波束成形向量。ISAC基站接收到的反射回波信號由下式給出:
txSig_T = pskmod(data_T, M, phase_shift);
alpha = sqrt(0.5)*(randn(1, L) + 1i*randn(1, L)); % 反射系數矢量,復高斯噪聲
a = exp(1i * 2 * pi * (0:NTx-1) * sin(theta_rad) * d).' / sqrt(NTx); % 發射方向矢量
b = exp(1i * 2 * pi * (0:NRx(nrx)-1) * sin(theta_rad) * d).' / sqrt(NRx(nrx)); % 接收方向矢量
f = a; % 發射波束成形矢量,與方向矢量a一致
Sensing_Rx = sqrt(gamma(ii)) * alpha(:, jj) .* (b * a' * f * txSig_T(:, jj))+ noise;
其中和
分別表示反射系數和目標角度,
和
分別是發射和接收波束形成向量。同樣,
表示與
無關的AWGN向量。為簡潔起見,我們假設目標位于單一距離門內,在這種情況下,目標參數是在給定時間延遲下估計的。
由于基站同時執行通信和感知任務,等式(1)和(2)中的信號可能同時被接收,導致以下S&C信號混合:
rxSig = Comm_Rx + Sensing_Rx ; 其中是一個零均值白高斯噪聲向量,方差為
。
對于通信任務,我們的目標是通過混合接收信號和已知的
來恢復符號
。對于感知任務,我們專注于在已知探測信號
的情況下估計目標的反射系數
。遵循雷達文獻中的標準假設[10],[11],并考慮到我們將注意力集中在反射系數的估計上,我們假設目標的角度是完全預測/跟蹤的,在這種情況下我們有
。根據Swerling II目標模型[12],我們假設目標的反射系數從脈沖到脈沖具有瑞利/指數分布的振幅,在這種情況下
以獨立同分布的方式遵循復高斯分布。為了表示方便,且不失一般性,我們通過噪聲功率
對
的方差進行歸一化,在這種情況下我們有
。
III. ISAC接收機設計
在本節中,我們提出兩種ISAC接收信號處理的設計策略,即IC方法和非IC方法。
A. 次優設計:IC
第一步是檢測通信符號,將其他信號,包括目標回波和噪聲,視為不需要的信號。因此,信號模型可以表示為
其中。注意到隨機變量
和向量
都是白高斯分布且相互獨立,它們的線性組合
也是高斯分布,具有零均值和協方差矩陣為
R = g * g' + sigma_sq * eye(NRx(nrx));其中。這表明
是有色高斯分布,導致相關的通信子信道。有了已知的協方差矩陣,我們可以對接收信號進行白化并將通信信道分解為幾個獨立的子信道
其中是白化矩陣,
是標準高斯白噪聲矩陣。
Q = sqrtm(inv(R)); % 白化矩陣,用于消除信道的相關性為了獲得最大分集增益并制定的充分統計量,可以采用最大比率合并器(MRC)接收機[13]。令
為我們選擇的合并器。合并后的通信信號模型可表示為
w = Q * h_c(:, jj); % MRC的加權矢量
rxSig_MRC = w' * Q * rxSig; % 進行MRC處理后的信號應用最大似然(ML)檢測器來最小化解碼錯誤。注意到也遵循AWGN分布的有用信號。在這種情況下,ML檢測問題可以被表述為以下最小二乘(LS)問題[14]
euclidean_dist = []; % 歐幾里得距離向量% 計算每個星座點的歐幾里得距離for k = 1:Mref = w' * Q * h_c(:, jj) * constellation(k); % 參考信號euclidean_dist = [euclidean_dist, norm(rxSig_MRC - ref)]; % 計算距離end[x_val, x_indx] = sort(euclidean_dist); % 對距離排序
predicted_symbol = x_indx(1:p) - 1; % 選取最小距離對應的符號
ML_predict_txSig(jj) = predicted_symbol; % 存儲最大似然預測的符號其中表示通信符號的字母表集合。問題(8)可以通過在字母表
中窮盡搜索最小值
來最優求解。顯然,這種方案對通信實現了最優性能,原因是等式(7)是
的充分統計量。
有了,我們可以恢復通信信號并從固定接收信號(3)中減去它:
s_hat = pskmod(predicted_symbol, M, phase_shift); % 將預測符號重新PSK調制為信號
Comm_approx = h_c(:, jj) .* s_hat; % 接收到的近似通信信號
y_hat_s = rxSig - Comm_approx; 其中。
現在,剩余的任務是估計。可以觀察到等式(9)是一個標準的貝葉斯線性模型,其中
服從先驗分布
。然而,殘差
的解析分布很難獲得。幸運的是,在大多數情況下,ML檢測器保證了檢測性能,使得在高信噪比(SNR)下誤差可以足夠小。在殘差誤差已確定的情況下,可以構建最小MSE(MMSE)估計器,如[15]所示:
ka = b * a' * f * txSig_T(:, jj); % 計算感知信號ka矩陣
K = ka' * inv(ka' * ka + sigma_sq * eye(1)); % 感知信道估計的權重% eg(10)
alpha_hat(jj) = K * y_hat_s; % 估計alpha值
其中。
雖然估計器(10)方便應用于ISAC接收器,但我們需要指出它不是真正的MMSE估計器,因為它忽略了殘差誤差,因此導致次優性能。
B. 最優設計:非IC
盡管上述策略對通信是最優的,但IC處理會帶來不可避免的殘差誤差。在隨后的估計步驟中沒有解決這個殘差誤差,而是將ML估計
作為點估計使用。因此,上述感知估計器是次優的,因為它沒有考慮符號檢測誤差的結構。這種性能損失在中等或低信噪比場景中尤為明顯。為了解決這個問題,我們為感知任務推導一個量身定制的MMSE估計器,通過利用通信星座的結構信息,在MSE意義上提供最優性能。為簡潔起見,我們在以下推導中省略
。
我們首先處理混合接收信號(3)。我們假設通信星座中的每個符號出現的概率相等,這在大多數通信系統中是常見的。因此,通信符號均勻分布,即。根據貝葉斯估計理論,
的MMSE估計器是其后驗概率密度函數(PDF)的均值,
表示為
其中。給定
,
和
是聯合高斯分布,其條件協方差矩陣為
其中。聯合分布的PDF為
其中。
如上所示,我們有且
,其中
。因此,
,其PDF為
將上述PDF代入等式(11),MMSE估計器表示為
公式(15)中的估計器不僅在最小化MSE的意義上是最優的,而且獨立于通信檢測器,因為它不依賴于檢測結果。同時,ML檢測器(8)在似然函數度量(以及在后驗概率方面,如果先驗PDF是均勻分布)中是最優的。因此,通過結合ML檢測器(8)和MMSE估計器(15),通信和感知性能同時達到最優。
注釋1:在多用戶信息理論中,IC指的是先解碼更強的分量然后再解碼較弱的分量的方法。從這個意義上說,就是次優設計上述提出的方法似乎僅在通信信號功率大于感知信號功率的情況下適合IC方案。然而,在感知信號更強的情況下,IC也可能導致通信解碼器的性能損失,這是由于被忽略的近似誤差。因此,由于沒有利用
的分布,通信解碼器是次優的。簡而言之,IC操作不可避免地導致性能下降,原因是在感知或通信信號中對結構信息的利用不充分。為簡潔起見,我們在本節后面詳細說明這種低效性。
IV. 性能分析
A. 通信信號檢測
為了分析通信符號解碼的比特誤碼率(BER)性能,我們關注通信信號模型(7)。由于這只是一個具有完美已知信道信息和噪聲功率的加性高斯白噪聲(AWGN)信道模型,我們可以根據函數輕松推導出BER的閉式表達,這取決于采用的調制格式。例如,對于使用相干解調器的QPSK調制,BER表示為
其中指的是合并后的總信噪比,由于采用了最大比合并(MRC)合并器,這等于所有子信道的信噪比之和。
B. 反射系數估計
根據貝葉斯估計理論,MMSE估計器與實際參數之間的均方誤差(MSE)可以轉化為條件方差的期望,表示為
由于公式(15)中的遵循混合高斯分布,公式(17)中的MSE通常沒有閉式表達。因此,我們需要通過數值計算MSE來評估感知性能,這將在仿真結果中詳細說明。
V. 數值結果
在本節中,我們提供數值結果來驗證所提出的ISAC接收器設計的有效性以及近似BER的準確性。為了說明兩種功能之間相互干擾的影響,我們使用以下系統模型
其中參數和
分別表示通信和感知信號的功率。相應地,通信信號
和感知信號
都被歸一化。
我們考慮一個配備了個發射天線和
個接收天線的ISAC基站,兩者都是間隔半波長的等間距線性陣列。由于我們主要關注感知和通信信號之間的相互干擾,噪聲功率設置為
dB,這足夠小,以便噪聲不會影響對感知和通信互相干擾的分析。在不失一般性的情況下,我們設定
,并假設上行通信信道向量
是獨立同分布的高斯隨機變量,均值為零,方差為1。通信信號
和雷達信號
都調制為QPSK。
圖2顯示了在固定感知功率()和變化通信功率(
)下的通信和感知性能。可以觀察到,理論BER完全符合所有接收天線數量下的仿真結果,非IC方法在感知MSE方面優于其IC對應方法。此外,通過增加接收天線獲得的陣列增益顯著提高了通信和感知性能。此外,從BER曲線的單調下降趨勢可以看出,存在MSE曲線的拐點,隨著接收天線數量的增加而向左移動。這種現象的原因在于通信功率的影響。一方面,增加的干擾功率導致感知性能下降。另一方面,更大的通信功率提高了檢測性能,同時消除了干擾。隨著通信功率的增加,消除效應超過了性能惡化效應,這導致了拐點。裝備越多天線的ISAC接收器,消除效果越好,這導致拐點的移動。
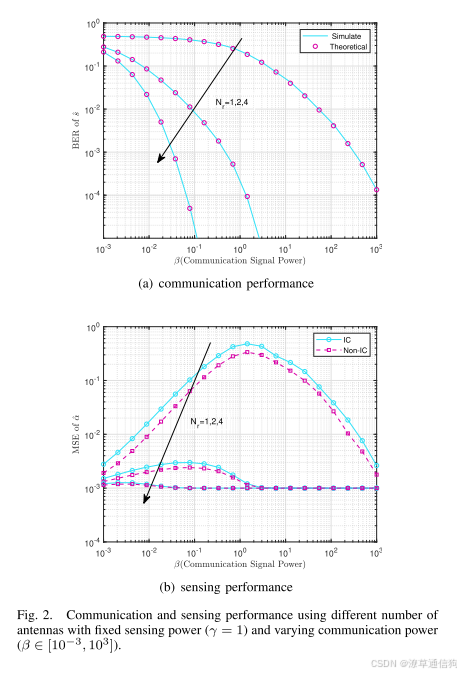
圖3顯示了使用不同調制方式的感知性能,包括BPSK、QPSK、8PSK和16QAM,固定感知功率()和變化通信功率(
)。如圖所示,雖然由于調制方式的不同特性,感知性能在各調制方式下有所不同,但BER曲線在所有調制格式下顯示相同的趨勢,這也與上述分析一致。

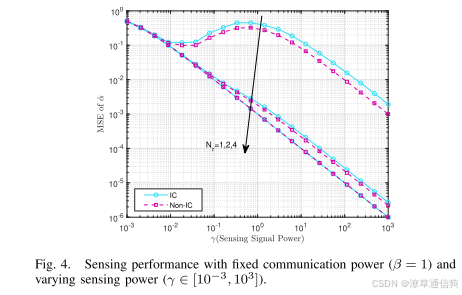
圖4顯示了固定通信功率()和變化感知功率(
)下的感知性能。隨著
的增加,感知性能總體上呈現持續改善趨勢,MMSE策略再次優于IC設計。然而,在
的情況下仍然存在拐點。當感知功率較小時,通信干擾的影響可以完全消除,而當感知功率較大時,這種影響則是固定的,這導致了MSE曲線的下降趨勢。然而,當感知功率與通信功率相當時,相互干擾效應變得更加嚴重,導致感知性能下降。幸運的是,這種性能損失可以通過增加天線數量獲得的陣列增益來補償。
VI. 結論
在這篇信函中,我們研究了MIMO-ISAC系統的聯合接收器設計,并提出了兩種用于同時符號檢測和目標回波估計的設計策略。特別地,第一種設計通過將目標回波干擾視為噪聲來執行通信符號的ML檢測,然后在減去解碼的通信符號后用MMSE估計器估計目標的反射系數,這本質上是一個IC接收器。第二種方法則考慮到通信信號的結構信息,為目標估計制定了一個改進的MMSE估計器,同時用ML解碼器檢測通信符號。通過數值仿真分析了兩種方法的性能,結果表明,非IC設計在感知MSE方面比其IC對應方法取得了更好的性能。


用于執行兩個矩陣(或圖像)逐元素乘法操作的函數mul())







)








