機器人簡介
下面給出一份機器人方向“從入門到進階”的極簡知識地圖,按「數學 → 硬件 → 軟件 → 算法 → 應用」五層展開,配合常用開源資源。你可以把它當作“字典”隨時查閱。
🔹 1. 數學層(所有算法的地基)
| 概念 | 一句話解釋 | 常用庫 |
|---|---|---|
| 線性代數 | 4×4 齊次矩陣 = 旋轉+平移一次搞定 | Eigen, numpy.linalg |
| 李群/李代數 | 把“旋轉+平移”變成可求導的向量 | Sophus, ceres::Lie |
| 概率 & 估計 | 卡爾曼/粒子濾波 = 帶噪聲的最優估計 | filterpy, robot_localization |
| 最優化 | 非線性最小二乘 = 把誤差平方和壓到最小 | ceres-solver, g2o |
🔹 2. 硬件層(機器人身體)
| 模塊 | 關鍵指標 | 典型器件 |
|---|---|---|
| 處理器 | 實時性 + 算力 | x86(ROS 主站)、STM32/ESP32(底層 MCU) |
| 執行器 | 力矩、精度、速度 | 伺服電機(Dynamixel)、無刷直驅、舵機 |
| 傳感器 | 頻率、噪聲、視場 | LiDAR(A2/RPlidar)、IMU(MPU9250)、RGB-D(RealSense) |
| 通信 | 延遲、帶寬 | CAN-FD、EtherCAT、Wi-Fi、ROS 2 DDS |
🔹 3. 軟件層(讓硬件動起來)
| 層級 | 作用 | 代表工具/框架 |
|---|---|---|
| 底層驅動 | 電機電流環、IMU采樣 | HAL庫、PlatformIO |
| 中間件 | 進程通信 + 時鐘同步 | ROS 2(rclcpp)、DDS |
| 實時系統 | 微秒級控制 | FreeRTOS、Xenomai、PREEMPT_RT |
| 上層應用 | SLAM、路徑規劃、人機交互 | ROS Navigation2、MoveIt2、Qt/PyQt |
🔹 4. 算法層(讓機器人“有腦子”)
| 任務 | 算法族 | 關鍵詞 |
|---|---|---|
| 狀態估計 | 卡爾曼、擴展卡爾曼、UKF、粒子濾波 | robot_localization |
| 建圖(SLAM) | 激光 SLAM:Gmapping、Cartographer | 回環檢測、圖優化 |
| 路徑規劃 | 全局:A*、Dijkstra、RRT* | move_base、move_base_flex |
| 運動控制 | PID、前饋、MPC | ros2_control、moveit2 |
| 機器視覺 | 目標檢測(YOLO)、位姿估計(PnP) | OpenCV、OpenVINO |
🔹 5. 應用層(真實落地場景)
| 場景 | 技術棧示例 |
|---|---|
| 移動機器人 | ROS 2 + Cartographer + DWA + RealSense |
| 機械臂 | MoveIt2 + OMPL + ros2_control + Dynamixel |
| 無人機 | PX4 + MAVROS + VINS-Fusion |
| AGV/AMR | ROS Navigation2 + LiDAR + SLAM Toolbox |
🧪 零基礎“1-2-3 步”上手路線
跑通 Hello Robot
買一臺 TurtleBot3 / 樹莓派小車 → 燒錄 Ubuntu + ROS 2 → 鍵盤遙控移動。做一個小 SLAM
激光雷達 +slam_toolbox→ RViz 實時建圖 → 保存.pgm地圖。加自主導航
使用 Navigation2 → 設定目標點 → 小車自動避障前往。
📚 常用開源資源速查表
| 名稱 | 一句話 | 地址 |
|---|---|---|
| ROS 2 官方教程 | 機器人軟件事實標準 | docs.ros.org |
| MoveIt2 | 機械臂運動規劃 | moveit.ros.org |
| PX4 開發者指南 | 無人機固件 | docs.px4.io |
| book《Probabilistic Robotics》 | SLAM 圣經 | PDF 可搜 |
| 課程《Modern Robotics》 | 李群+運動學 | Northwestern 公開課 |
? 一句話總結
機器人 = 數學(矩陣/優化) + 硬件(電機/傳感器) + 軟件(ROS 2) + 算法(SLAM/規劃) 的交叉系統。
先跑通“小車建圖 + 導航”這個小閉環,再按上面地圖逐層深挖,就能在機器人領域穩步升級。
工業機器人簡介
工業機器人(Industrial Robot)= 機械臂 + 控制器 + 示教器 + 現場總線 + 工藝軟件
下面按“1 張總覽圖 + 6 大模塊 + 3 條上手路線”給你速通工業機器人的必備基礎知識。
🔧 1. 總覽圖(記住這張圖,就能定位任何知識點)
┌────────────┐ ┌────────────┐ ┌────────────┐
│ 機械本體 │?──?│ 控制器 │?──?│ 示教器/PC │
│ (6 軸/SCARA│ │(柜/驅控一體)│ │(TP/UI) │
└────┬───────┘ └────┬───────┘ └────┬───────┘│ │ ││ IO/總線 │ 運動指令 │ 工藝程序
┌────▼───────┐ ┌────▼───────┐ ┌────▼───────┐
│ 末端執行器│ │ 現場總線 │ │ 工藝算法 │
│(焊槍/吸盤)│ │(EtherCAT)│ │(焊接/碼垛)│
└───────────┘ └───────────┘ └───────────┘📚 2. 六大知識模塊
表格
復制
| 模塊 | 關鍵概念 | 一句話速記 |
|---|---|---|
| ① 機械本體 | 6 軸串聯、SCARA、Delta、協作機器人 | “軸數越多,靈活度越高,剛性越低” |
| ② 運動學 | 正解(笛卡爾→關節)、逆解(關節→笛卡爾)、DH 參數 | “FK 易,IK 難” |
| ③ 控制器 | 實時操作系統、伺服環 1 kHz、軌跡插補、動力學補償 | “控制器=工業機器人的大腦” |
| ④ 示教與編程 | 示教器(TP)、在線/離線編程、Rapid/TP 語言、G-Code | “先示教,再自動運行” |
| ⑤ 現場通訊 | EtherCAT、Profinet、Modbus-TCP、IO-Link | “實時性:EtherCAT < 1 ms” |
| ⑥ 工藝應用 | 焊接、搬運、噴涂、打磨、碼垛、3C 裝配 | “工藝包 = 機器人+末端+工藝算法” |
🧮 3. 必須記住的 5 個公式
表格
復制
| 公式 | 場景 |
|---|---|
| 齊次變換 T = [R t; 0 1] | 4×4 矩陣一次完成旋轉+平移 |
| 逆運動學 θ = IK(x,y,z,rx,ry,rz) | 把笛卡爾目標變成關節角 |
| 雅可比 J = ?x/?θ | 速度與力映射 |
| 軌跡插補 S-curve | 平滑啟停,減少機械沖擊 |
| 動力學 τ = M(θ)θ? + C(θ,θ?) + G(θ) | 計算關節力矩 |
🛠? 4. 主流品牌速覽
表格
復制
| 品牌 | 特色 | 控制器語言 |
|---|---|---|
| ABB | 協作機器人 + RobotStudio 離線 | RAPID |
| FANUC | 高可靠性 + iRVision | TP/Karel |
| KUKA | 開放平臺 + ROS 驅動 | KRL |
| YASKAWA | 高速搬運 + Sigma7 伺服 | INFORM |
| 埃斯頓/匯川 | 國產高性價比 | ESTUN/INOVANCE 語言 |
🚀 5. 三條上手路線(按投入時間)
表格
復制
| 路線 | 0-1 周 | 1-4 周 | 1-3 月 |
|---|---|---|---|
| 📱 仿真路線 | RobotStudio / RoboDK 離線 | 創建虛擬工作站 | 完整搬運/焊接 demo |
| 🧪 開源機器人 | ROS-Industrial + MoveIt + Gazebo | 驅動 UR5 虛擬 | 真實 UR 協作臂 |
| 🏭 現場路線 | 示教器點動 + 簡單示教 | 編寫 TP 程序 | 集成 PLC + 視覺 |
📦 6. 工具/資源清單
| 類別 | 名稱 | 一句話 |
|---|---|---|
| 仿真 | RobotStudio, RoboDK, Gazebo | 零成本試錯 |
| 離線編程 | ABB RobotStudio, FANUC ROBOGUIDE | 真機 1:1 復現 |
| 學習資料 | 《工業機器人技術基礎》教材、ABB 官方 eLearning | 免費視頻 |
| 開源驅動 | ros-industrial/universal_robots,?ros-industrial/fanuc | 即插即用 ROS |
| 證書 | ABB IRC5、FANUC CRX 認證 | 求職加分 |
? 一句話總結
工業機器人 = “機械臂 + 實時控制器 + 工藝軟件” 的三位一體;
先把 “6 軸正逆解 + EtherCAT 通訊 + 示教器編程” 這三關打通,就能在 90% 的產線場景里“獨立上崗”。
主要內容
系統組成
由三大部分6個子系統組成。傳送帶、機器人本體、外圍系統控制柜、控制柜、示教器。網絡服務器、電腦、U盤
示教器:是輸入和讀取的設備。通過U盤進行備份。
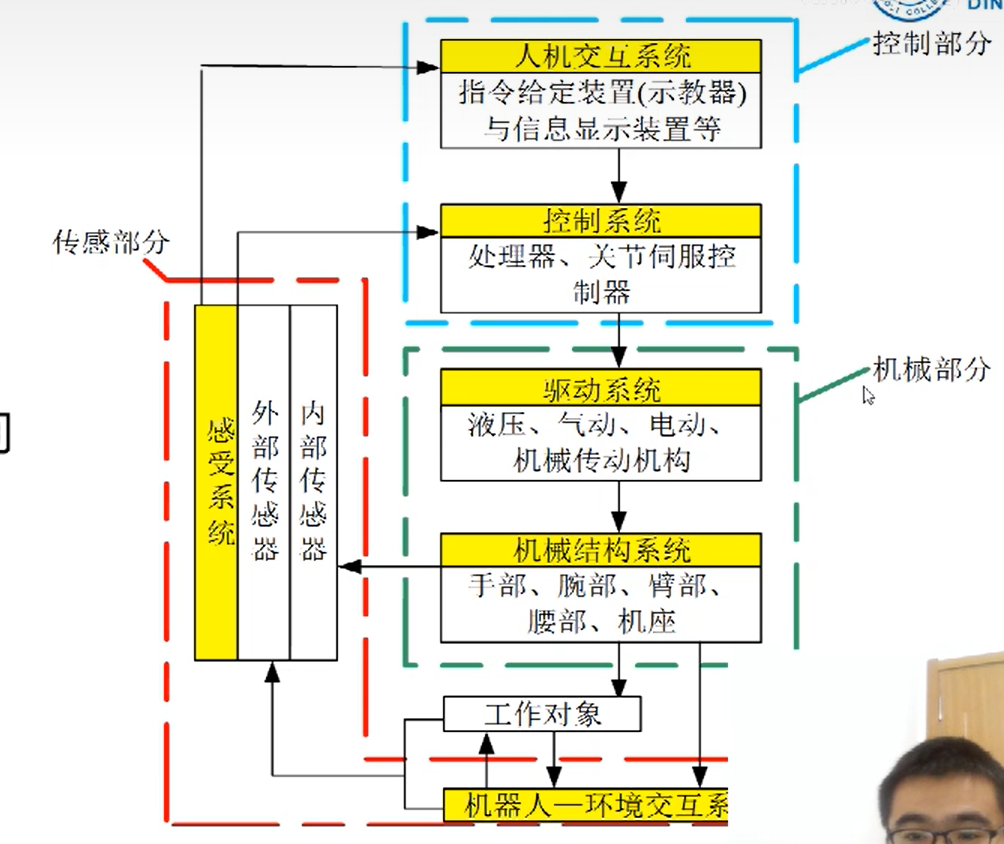
機械部分
用于實習各種動作,包括:機械結構和驅動系統。
機械結構系統
工業機器人的機械結構系統又稱為執行機構,也稱操作機,通常由桿件和關節組成。
從功能角度,執行機構可分為:
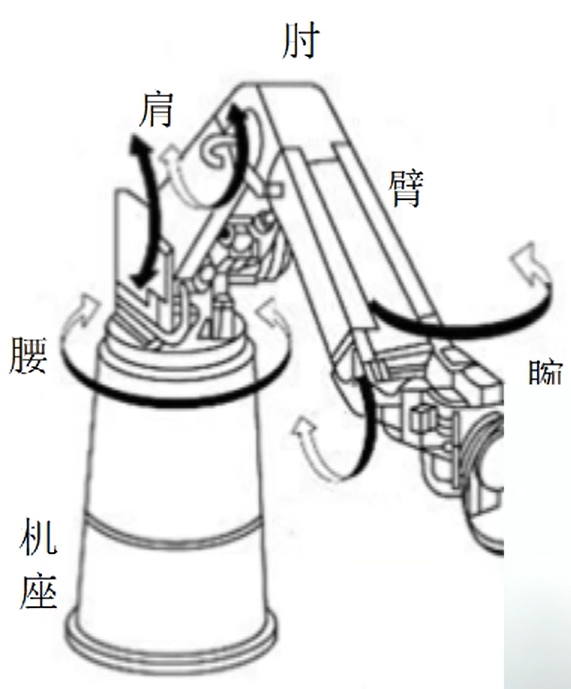
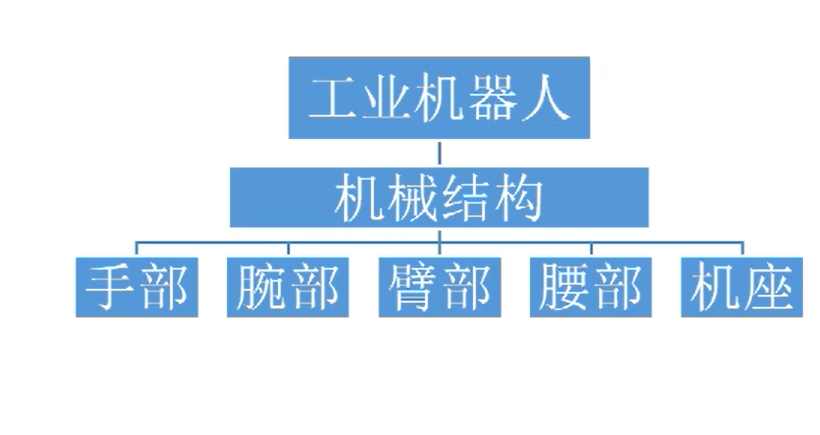
手部:末端執行器,其作用是直接抓取和放置物件。
腕部:連接手部和臂部的部件,其作用是調整或改變手部的姿態。
臂部:手臂,用以連接腰部和腕部,用以帶動腕部運動。
腰部:立柱,是支撐手臂的部件,其作用是帶動臂部運動,與臂部運動結合,把腕部傳遞到需到的工作位置。
機座:機座分為固定式和移動式。
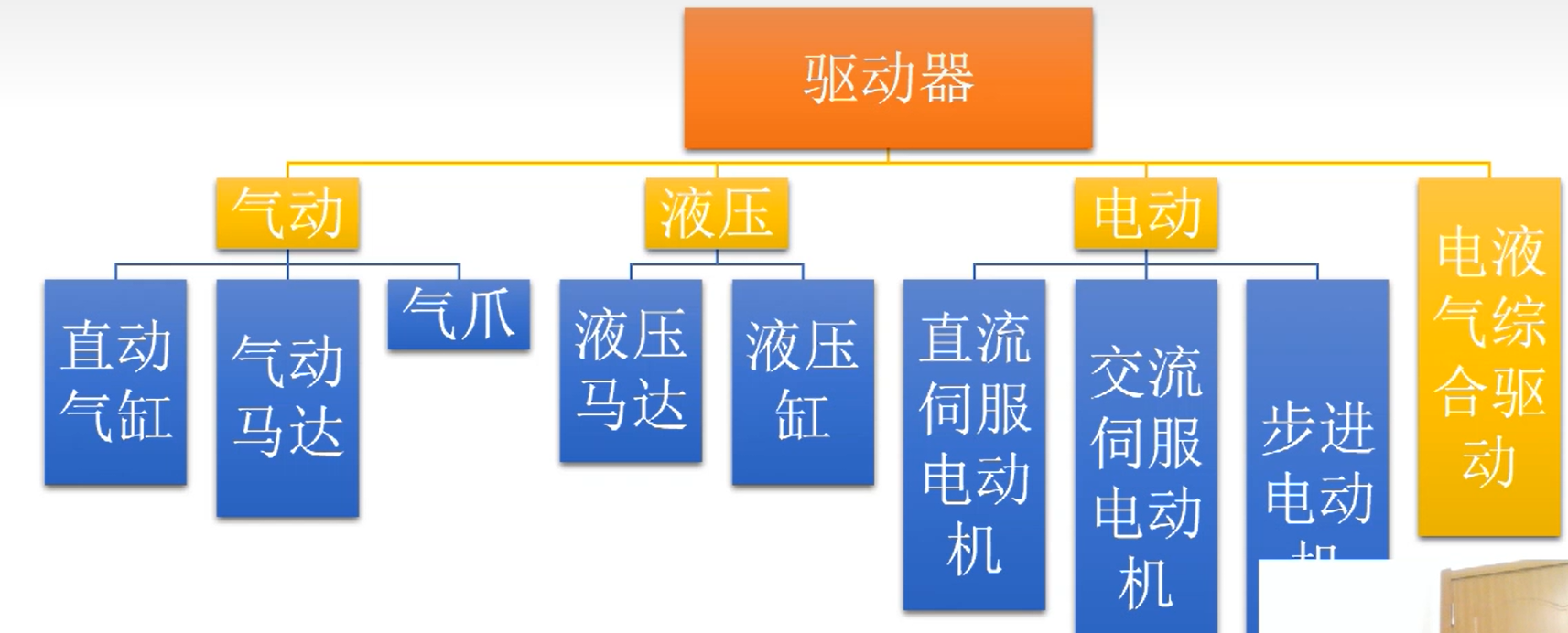
驅動系統
工業機器人的驅動系統包括驅動器和傳動機構兩部分,他們通常與執行機構連成機器人本體。
驅動器
各種電、液、氣裝置。電機驅動:直流伺服電機、步進電機、交流伺服電機。
液壓驅動、氣動驅動。
傳動機構
傳動機構常見的有:諧波減速器、滾珠絲桿、鏈、帶以及各種齒輪系。
控制部分
控制機器人完成各種動作,人機交互系統和控制系統。
人機交互系統
是使操作人員參與機器人控制并與機器人進行聯系的裝置。該系統歸納起來分為兩大類:指令給定裝置和信息顯示裝置。
控制系統
工業機器人的控制系統一般由控制計算機和伺服控制器組成。
控制計算機不僅可以發出指令,協調各關節驅動之間的運動,同時要完成編程、示教/再現,在其他環境狀態(傳感器信息)、工藝要求,外部相關設備(電焊機)之間傳遞信息和協調工作。
伺服控制器控制各個關節的驅動器。
傳感部分
用于感知內部和外部的信息,包括:感受系統和機器人——環境交互系統。
感受系統
感受系統包括內部檢測系統和外部檢測系統兩部分。
內部檢測系統的作用就是通過各種檢測器,檢測執行機構的運動狀況,根據需要反饋給控制系統,與設定值進行比較后對執行機構進行調整以保證其動作符合設計需求。
外部檢測系統檢測機器人所處環境、外部物體狀態或機器人與外部物體的關系。


)






圖像標簽的三個常用屬性:width、height、border)




導出 DLL 函數的功能)




