導? 讀
????本文主要介紹使用YOLOv8圖像分割實現路面坑洞檢測(步驟 + 代碼)。??
背 景

????如上圖所示,現實生活中路面坑洞對車輛和駕駛員安全來說存在巨大隱患,本文將介紹如何使用YoloV8圖像分割技術來檢測路面坑洞,從而提示駕駛員注意避讓,盡可能保證安全。
??
實現步驟
? ??【1】準備數據集。
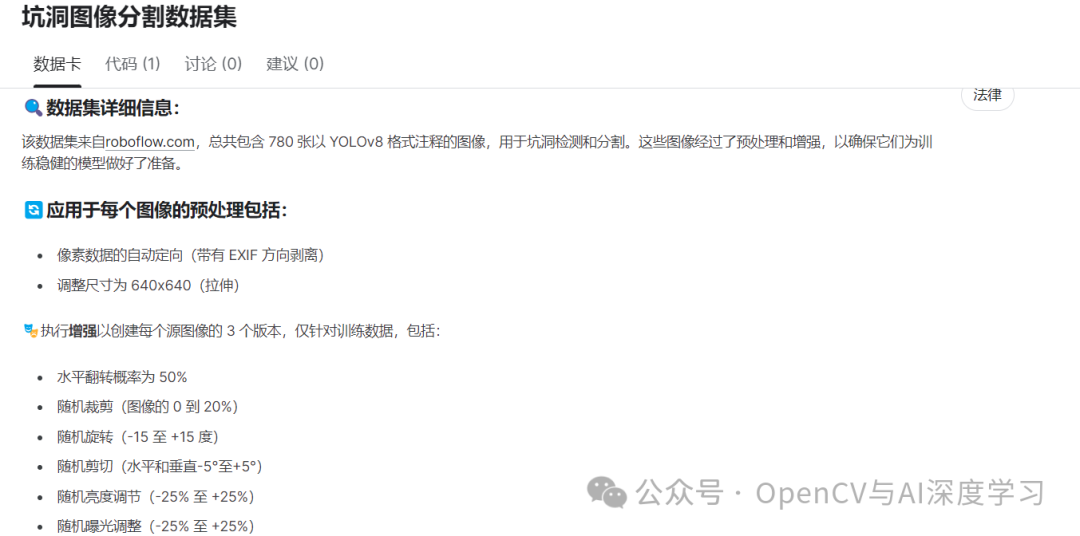
????本教程中使用Pothole圖像分割數據集。獲取坑洼圖像分割數據集。您可以從?Kaggle?訪問它,這是一個流行的數據科學競賽、數據集和機器學習資源平臺。數據集下載鏈接:
https://www.kaggle.com/datasets/farzadnekouei/pothole-image-segmentation-dataset????下載數據集后,如果數據集已打包,您可能需要從壓縮格式(例如 ZIP 或 TAR 文件)中提取文件。

? ??【2】安裝Ultralytics,導入必要的庫。
????安裝Ultralytics:
pip?install?ultralytics????導入必要的庫:
import pandas as pdimport numpy as npimport matplotlib.pyplot as pltimport seaborn as snsimport osimport warningsfrom ultralytics import YOLOimport cv2from PIL import Imageimport yamlimport random
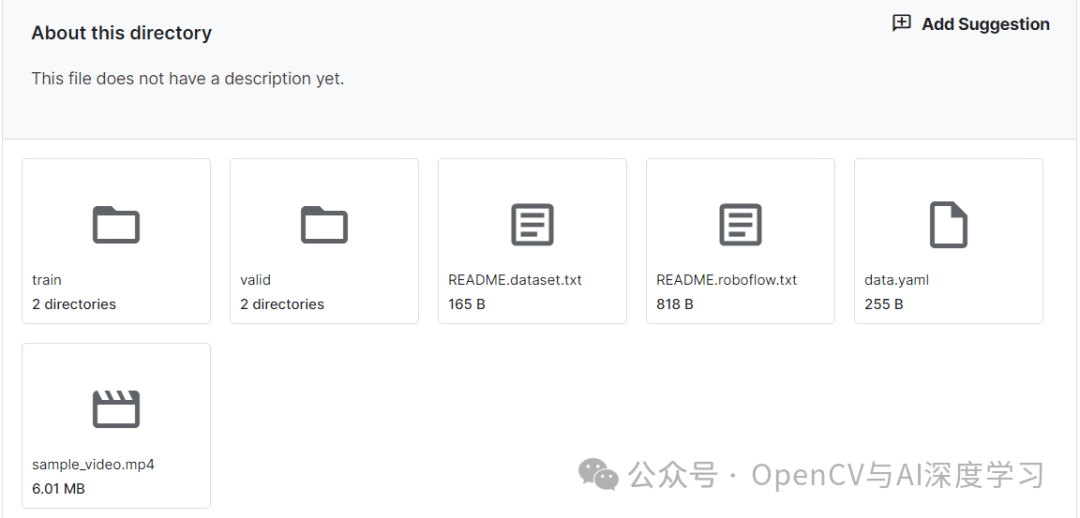
? ??【3】設置數據路徑。
dataDir = '/content/Pothole_Segmentation_YOLOv8/'? ??dataDir目錄路徑“/content/Pothole_Segmentation_YOLOv8/”的變量。該變量表示存儲圖像分割任務的數據集的目錄。
? ??【4】加載并繪制圖像。???????
trainImagePath = os.path.join(dataDir, 'train','images')#list of the imagesimageFiles = [f for f in os.listdir(trainImagePath) if f.endswith('.jpg')]randomImages = random.sample(imageFiles, 15)plt.figure(figsize=(10, 10))for i, image_file in enumerate(randomImages):image_path = os.path.join(trainImagePath, image_file)image = Image.open(image_path)plt.subplot(3, 5, i + 1)plt.imshow(image)plt.axis('off')# Add a suptitleplt.suptitle('Random Selection of Dataset Images', fontsize=24)# Show the plotplt.tight_layout()plt.show()
????設置訓練圖像路徑:
??? trainImagePath = os.path.join(dataDir, 'train','images'):此行構造包含訓練圖像的目錄的路徑。它使用該os.path.join()函數將基本目錄路徑 ( dataDir) 與存儲訓練圖像的子目錄“train”和“images”連接起來。
????列出圖像文件:
??? imageFiles = [f for f in os.listdir(trainImagePath) if f.endswith('.jpg')]:此行在目錄中創建圖像文件列表trainImagePath。它使用列表理解來迭代目錄中的文件,并僅過濾那些以“.jpg”擴展名結尾的文件。
????選擇隨機圖像:
??? randomImages = random.sample(imageFiles, 15):此行從上一步使用該函數獲得的圖像文件列表中隨機選擇 15 個圖像random.sample()。
????繪制圖像:
-
-
以下代碼行迭代隨機選擇的圖像,使用?PIL?( Image.open()) 打開每個圖像,然后用于matplotlib.pyplot創建顯示所選圖像的子圖網格。
-
該plt.subplot()函數用于定位網格中的每個圖像。
-
plt.imshow()在子圖中顯示圖像。
-
plt.axis('off')刪除軸標簽以獲得更清晰的可視化效果。
-
????添加標題并顯示繪圖:
??? plt.suptitle('Random Selection of Dataset Images', fontsize=24):為整個情節添加標題。
??? plt.tight_layout()調整子圖的布局以防止重疊。
??? plt.show()顯示情節。
隨機選擇數據集圖像
? ??【5】下載并訓練YoloV8分割模型。
model = YOLO('yolov8n-seg.pt')????加載預訓練權重:'yolov8n-seg.pt'傳遞給 YOLO 構造函數指定 YOLOv8n 模型預訓練權重的文件路徑。這些權重對于使用訓練過程中學到的參數初始化神經網絡至關重要。
yamlFilePath = os.path.join(dataDir,'data.yaml' )??? yamlFilePath = os.path.join(dataDir,'data.yaml')用于構造名為 的 YAML 文件的文件路徑data.yaml。???????
results = model.train(data= yamlFilePath,epochs= 30 ,imgsz= 640 ,batch= 32 ,optimizationr= 'auto' ,lr0= 0.0001 , # 初始學習率lrf= 0.01 , # 最終學習率 (lr0 * lrf)?????dropout?=?0.25?,???????????#?使用?dropout?正則化device= 0 , # 運行的設備,即 cuda device=0seed= 42)
????開始 YOLOv8 圖像分割模型的訓練過程。讓我們分解一下傳遞給該model.train()方法的參數:
-
data:此參數指定 YAML 文件 ( ) 的路徑,yamlFilePath其中包含配置設置和有關用于訓練的數據集的信息。YAML 文件可能包含圖像文件路徑、注釋文件、類名等詳細信息。
-
epochs:該參數決定訓練過程中的 epoch 數(完整遍歷整個數據集)。在我們的例子中,模型將訓練 30 個?epoch。
-
imgsz:該參數指定訓練時模型的輸入圖像大小。圖像在輸入網絡之前可能會調整為 640x640 像素。
-
batch:該參數設置訓練期間使用的批量大小。它確定在訓練過程的每次迭代中同時處理的圖像數量。這里使用的批量大小為 32。
-
optimizer:該參數指定用于訓練模型的優化器。該值'auto'表明訓練過程會根據模型架構或其他設置自動選擇優化器。
-
lr0:該參數設置優化器的初始學習率。指定學習率為 0.0001,這是許多優化任務的常見起始值。
-
lrf:該參數指定最終學習率,其計算方式為初始學習率乘以lrf。它有助于在訓練過程中逐漸降低學習率以穩定學習過程。
-
dropout:該參數指定 dropout 率,這是一種用于防止訓練期間過度擬合的正則化技術。丟棄率為 0.25 表示在每次訓練迭代期間將隨機丟棄 25% 的神經元。
-
device:此參數指定模型將在其上進行訓練的設備。值0通常表示在第一個 CUDA 設備 (GPU) 上進行訓練(如果可用),否則將使用 CPU。
-
seed:此參數設置用于訓練期間再現性的隨機種子。設置固定種子可確保每次執行代碼時生成相同的隨機數序列,這對于調試和結果再現性很有用。
? ??【6】加載性能最佳的模型。???????
bestModelpath = '/content/runs/segment/train/weights/best.pt'bestModel = YOLO(bestModelpath)
-
-
bestModelpath:該變量包含訓練期間獲得的最佳模型的文件路徑。
-
'/content/runs/segment/train/weights/best.pt':該字符串指定包含最佳模型權重的文件的路徑。
-
? ??【7】加載圖像做推理。???????
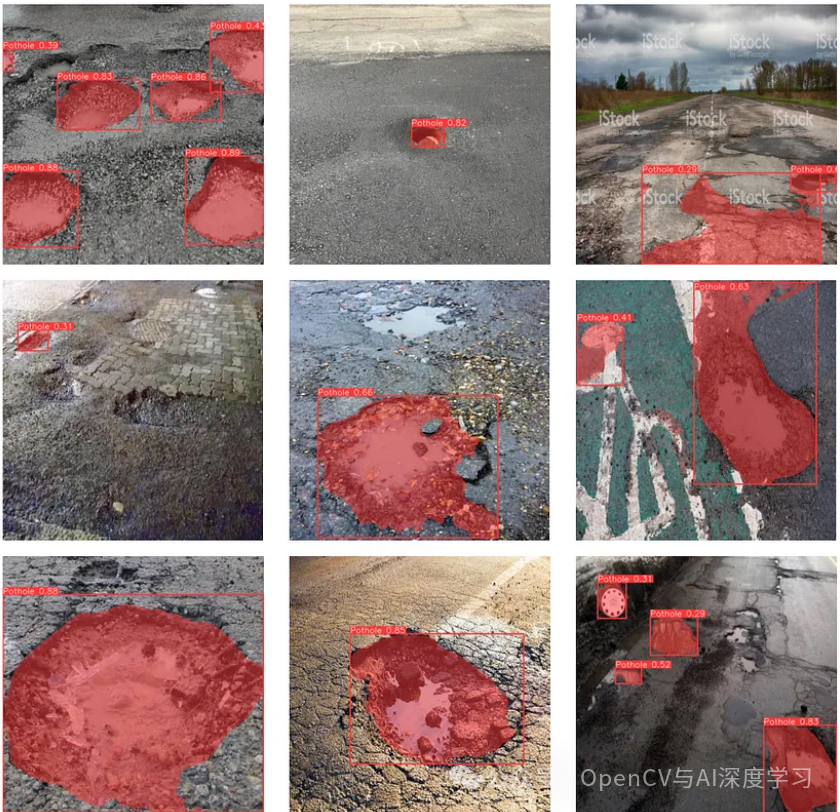
validImagePath = os.path.join(dataDir, 'valid', 'images')imageFiles = [f for f in os.listdir(validImagePath) if f.endswith('.jpg')]#select Random imagesnumImages = len(imageFiles)selectedImage = [imageFiles[i] for i in range(0, numImages, numImages // 9)]fig, axes = plt.subplots(3, 3, figsize=(10, 10))fig.suptitle('Validation Set Inferences')for i, ax in enumerate(axes.flatten()):imagePath = os.path.join(validImagePath, selectedImage[i])results = bestModel.predict(source= imagePath, imgsz=640)annotatedImage = results[0].plot()annotatedImageRGB = cv2.cvtColor(annotatedImage, cv2.COLOR_BGR2RGB)ax.imshow(annotatedImageRGB)ax.axis('off')plt.tight_layout()plt.show()
????使用訓練期間獲得的最佳模型對驗證圖像集進行推斷。
????設置驗證圖像路徑:
-
-
validImagePath = os.path.join(dataDir, 'valid', 'images'):此行構造包含驗證圖像的目錄的路徑。
-
????列出驗證圖像文件:
-
-
imageFiles = [f for f in os.listdir(validImagePath) if f.endswith('.jpg')]:此行在目錄中創建圖像文件列表validImagePath。
-
????選擇隨機圖像:
-
-
numImages = len(imageFiles):此行計算驗證集中的圖像總數。
-
selectedImage = [imageFiles[i] for i in range(0, numImages, numImages // 9)]:此行從驗證集中選擇圖像的子集。似乎通過將圖像總數 ( numImages) 除以 9 來選擇 9 個圖像。
-
????繪制推斷圖像:
-
-
然后,代碼繼續使用 來創建 3x3 子圖網格plt.subplots()。整個圖的標題設置為“驗證集推斷”,使用fig.suptitle().
-
它使用 迭代子圖enumerate(axes.flatten()),其中每個子圖代表驗證集中的一個圖像。
-
對于每個子圖,它使用 加載相應的圖像os.path.join(validImagePath, selectedImage[i]),使用 方法執行推理bestModel.predict(),并使用 繪制帶注釋的圖像results[0].plot()。
-
OpenCV的cv2.cvtColor()函數用于將帶注釋的圖像從BGR轉換為RGB格式,適合用Matplotlib顯示。
-
最后,它使用 隱藏每個子圖的軸ax.axis('off')。
-
? ??【8】加載視頻做推理。???????????
import shutilvideoPath = '/content/Pothole_Segmentation_YOLOv8/sample_video.mp4'bestModel.predict(source=videoPath, save=True)??????????????
import subprocess# Convert AVI to MP4 using FFmpegsubprocess.call(['ffmpeg', '-y', '-loglevel', 'panic', '-i', '/content/runs/segment/predict/sample_video.avi', 'output_video.mp4'])from IPython.display import Video# Display the converted MP4 videoVideo("output_video.mp4", embed=True, width=960)
????結論:
????當我們結束使用 YOLOv8 的圖像分割迷人世界的旅程時,我們發現自己配備了新的見解、技能和可能性。在整個項目中,我們從數據管理到模型訓練、推理和評估,揭示了圖像分割的復雜性及其在計算機視覺中的變革潛力。
—THE END—

)

)


)





)



)


