移相電路就是對輸入信號(一般是正弦波)進行相位控制,而不改變其幅度,本推文以移相電路為例,展示模擬電路的反饋設計技巧與方法:
一、全通濾波器實現移相
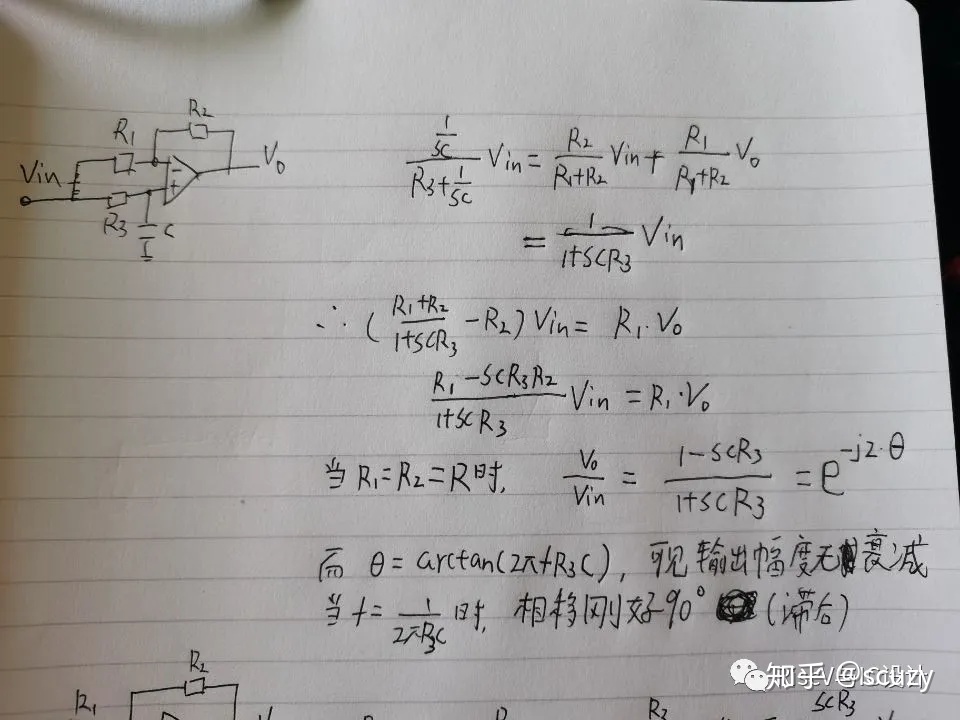
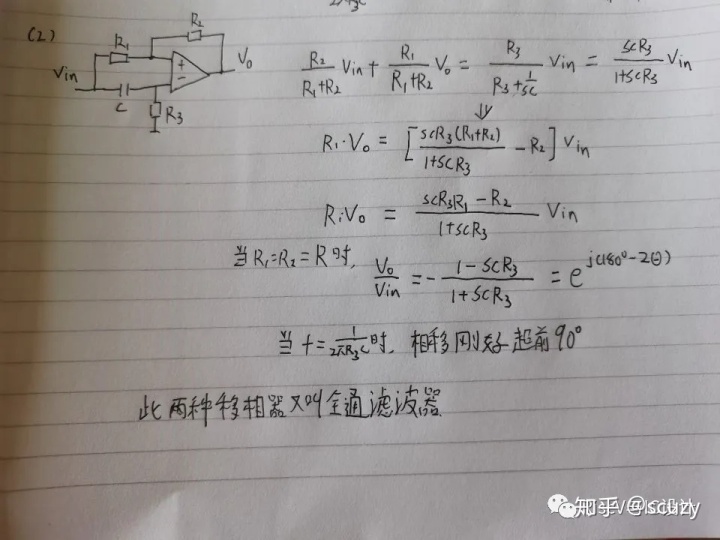
以上是兩種移相電路 的原理,其輸出幅度保持不變,移動的相位隨R3和C而改變,在C和R3確定時其移相是arctan函數,非線性的,當WR3C較小時,近似線性arctan(x)=x,|x|<=0.5,仿真伯德特的相位如下:
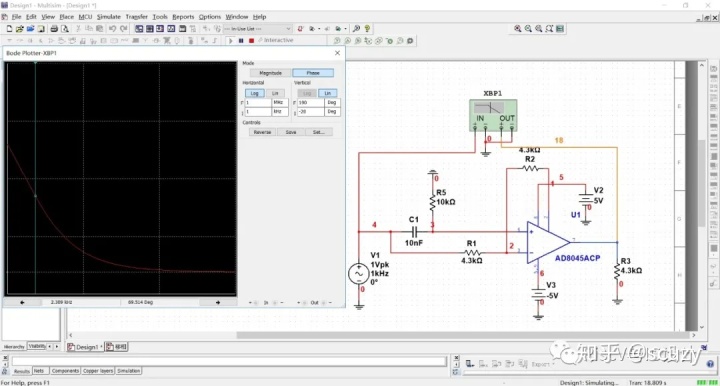
上圖可見,在WR3C較小時,是線性相移,即確定最最高頻率Wmax后可以反向計算R3C<=0.5/Wmax,確定線性相移應用的時間常數R3C。
二、反饋控制設計舉例
現在需要設計一個電路,實現輸入頻率在一定范圍內變化、輸入信號的初始相位變化時,輸出信號始終超前輸入信號90°,而輸出信號幅度保持與輸入信號幅度相同。這該如何實現?
應用前述的全通濾波器,好像有希望實現,關鍵是要能調整C與R3,而且要剛好調整到對輸入信號移相90°,這是問題的關鍵。我們把問題細分一下:
1)如何改變C或R3?
2) 如何檢測相位差?這其實就是要根據相位差來反饋控制C或R3的變化,可以采用模擬控制也可用數字控制方式。
先說1),改變C當然不能人去手動調節,要用電信號自動調節,首先想到的就是反向偏置的變容二極管,本推文我們不選擇改變C,如果是改變R3那么如何做?當然不能用普通電位器了
,我們還是需要能電控改變阻值的東東:
a)不少人可能首先想到的是數字電位器,這個有些問題:首先太復雜,意味著你要使用單片機,而且數字電位器都是離散電阻值,假設一步對應100歐姆,1.5khz時需要900歐姆,剛好合適,而1.525khz輸入頻率,如果需要923.56歐,就完了,因為一步對應100歐姆的數字電位器只有900歐姆、1000歐姆,沒有923.56歐姆,會影響控制精度,所以數字電位器不是最佳方案。那么你非要使用數字電位器又該怎么辦?那也不是沒有辦法,只是精度差一些:比如,你可以參考PWM控制的思路,在20次控制中,1000*(20-x)/20+900*x/20=923.56,計算出x次選擇900歐,剩下(20-x)選擇1000歐。
b)還有就是選擇JFET管,工作在可變電阻區,這是非常好的方案,只是要控制JFET的工作電壓和擴展JFET的線性,下面詳述
再說2),這里關鍵是需要一個鑒相器,來檢測相位差,二極管鑒相器、二極管平衡環狀鑒相器、乘法器....都可以做鑒相器,這里為了簡單選擇乘法器做鑒相器
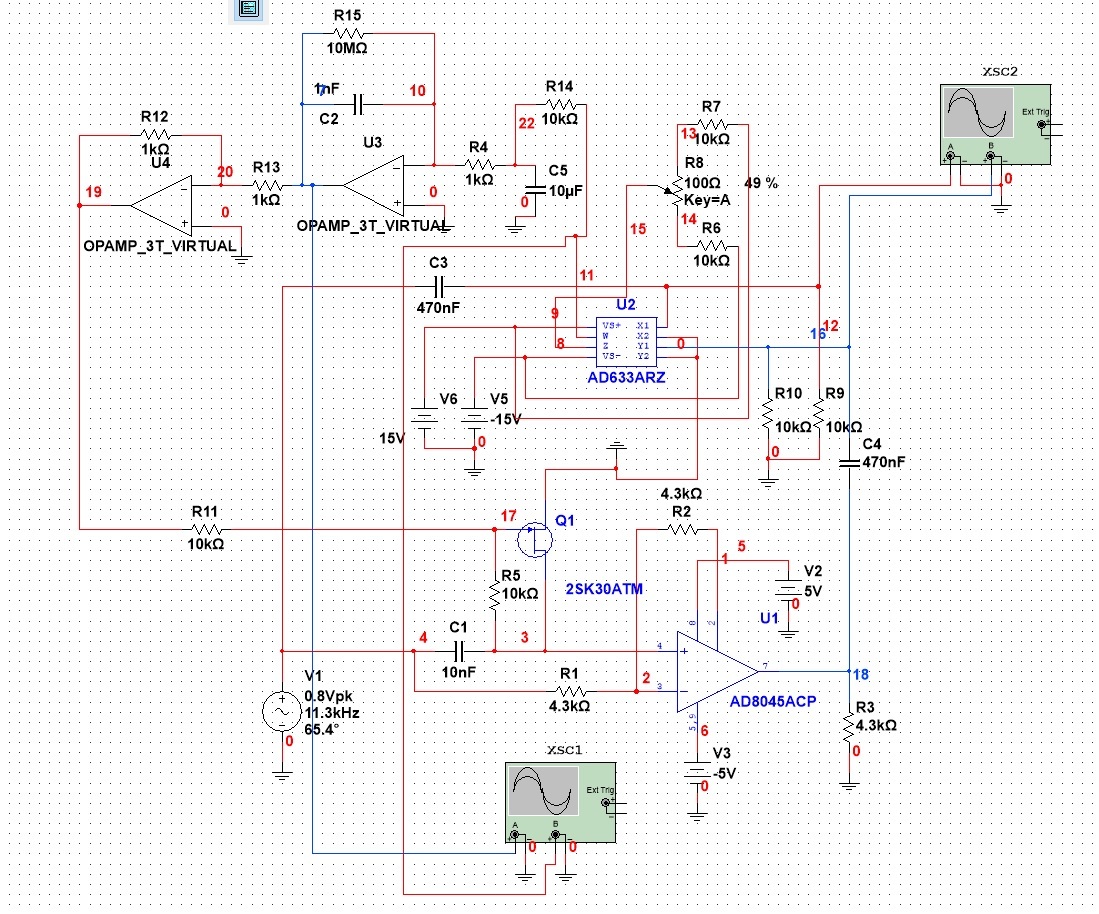
先給出整體仿真電路和仿真實驗結果:
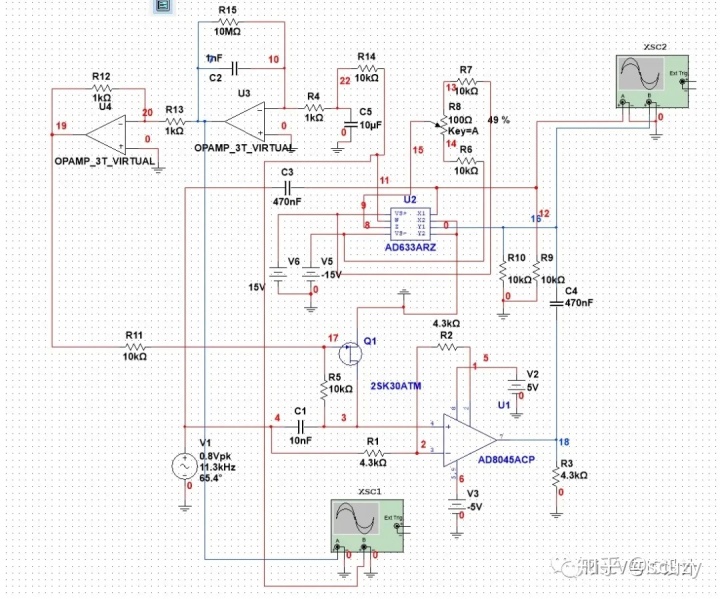
下面看看反饋跟蹤控制電路,其由鑒相器和JFET可變電阻構成:
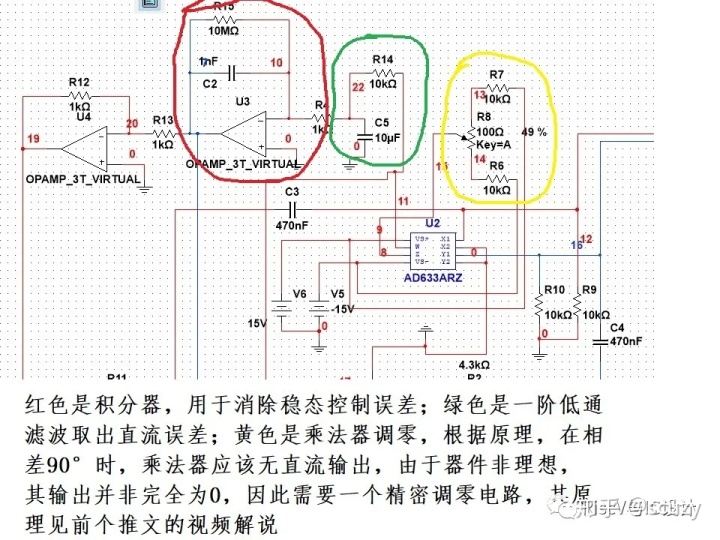
1)鑒相器這里采用的是乘法器,把輸出信號Asin(wt+Po)與輸入信號Asin(wt+P1)相乘,sina*sinb=-0.5[cos(a+b)-cos(a-b)],當兩者差90°時結果只有cos2wt 二倍頻分量,無直流分量,而非90°相位差時,會有一個直流分量0.5*cos(Po-P1), 推文中使用一個一階RC取出直流分量,然后對直流分量進行積分,這個積分器是必須的,其作用就是如果誤差沒有消除就不斷增強調節作用,此處如果換成放大器就沒有持續調節作用了,其實這就是PID控制中的積分環節,目的就是消除最終的穩態誤差!此電路只是臨時起意設計的,參數還沒有優化計算。
2)JFET可變電阻
jFET的輸出電流ID與VGS(柵源電壓)、VDS(漏源電壓)關系如下,可以推導出其輸出導納gDS
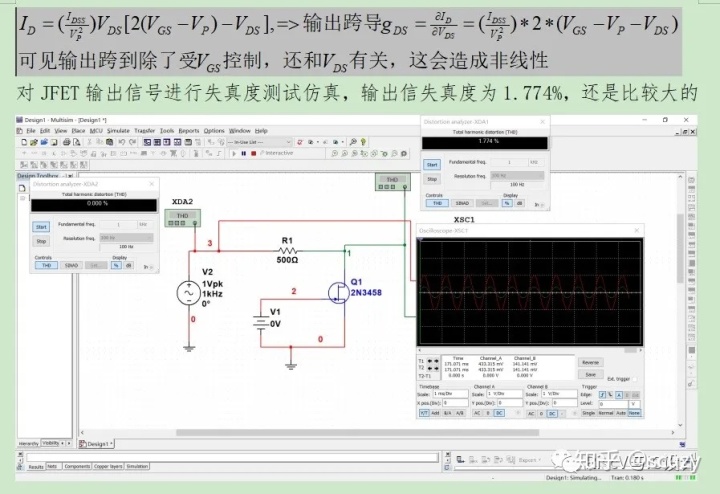
現在如下圖所示,通過R3/R2引入對Vds信號的反饋,目的是減小JFET輸出電阻的非線性,造成非線性的原因從上圖的gDS公式可見其還是Vds的函數,因此我們的做法還是負反饋!引入對Vds信號的負反饋來抑制Vds對ID的影響!
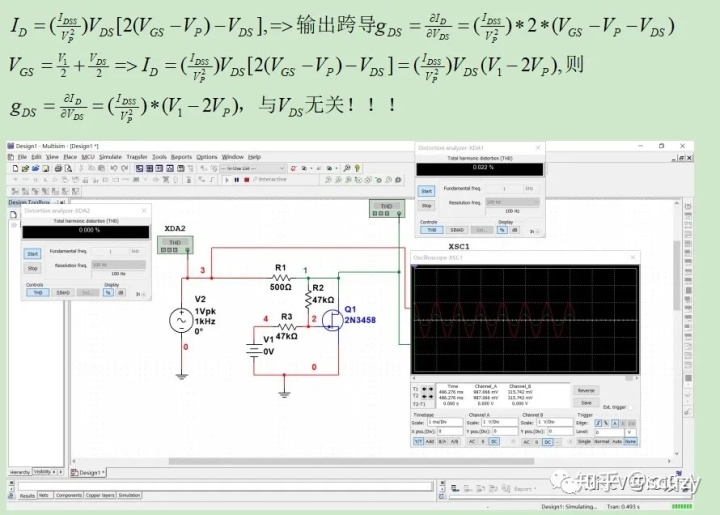
失真補償以后,失真度降為0.022%,這改善非常明顯,記住善于應用負反饋者,如果模擬電路世界的天下一分為四,你已得其一!是不是有點當年諸葛大神的隆中對三分天下的意思?
這種JFET低失真可變電阻很有用,例如下圖的低失真系數的正弦波振蕩器:
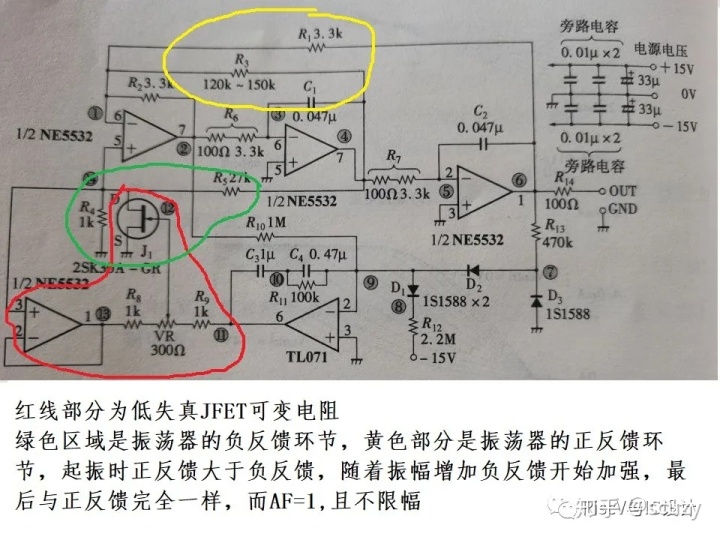
紅色區域左下角的1:1運放就是為了隔離R8/R9/VR對R4的負載效應; TL071也是反饋控制中的積分環節,目的一樣是消除穩態誤差;D2/D3構成主要的信號幅度信息提取網絡,采用半波整流電路取出正半周信號,通過積分器其實就是半波整流輸出信號的平均直流分量,該分量與正弦波的幅度成比例:
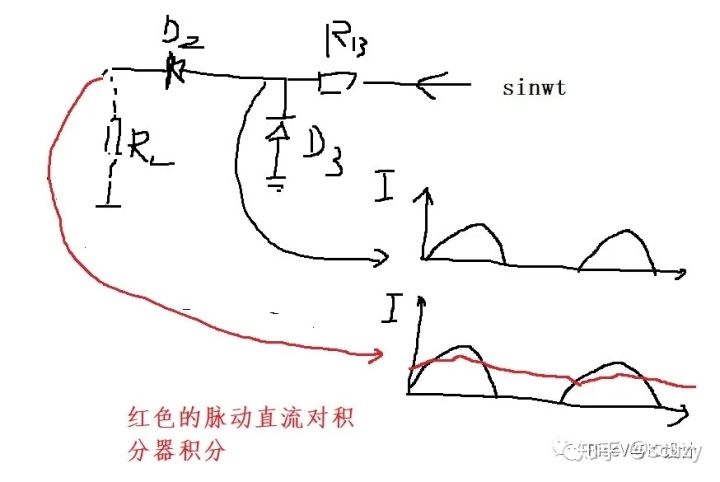
二極管半波整流雖然簡單而且不精確,但是和積分器搭配卻是很常見的信號幅度提取與反饋控制的手段!
關注微信公眾號: RiscV與IC設計

修改成小時分鐘_銀行核心系統24小時機制實現總結)




SVD推薦(1)解讀奇異值分解)








)



