這是繼 RCNN,fast-RCNN 和 faster-RCNN 之后,rbg(RossGirshick)針對DL目標檢測速度問題提出的另外一種框架。YOLO V1 增強版本GPU中能跑45fps,簡化版本155fps。
- 論文名: 《You Only Look Once:Unified, Real-Time Object Detection》
- 論文地址:https://arxiv.org/pdf/1506.02640v5.pdf
- 代碼:https://github.com/pjreddie/darknet
1. YOLO的核心思想
YOLO的核心思想就是利用整張圖作為網絡的輸入,直接在輸出層回歸bounding box的位置和bounding box所屬的類別。
faster RCNN中也直接用整張圖作為輸入,但是faster-RCNN整體還是采用了RCNN那種 proposal+classifier的思想,只不過是將提取proposal的步驟放在CNN中實現了,而YOLO則采用直接回歸的思路。
2.YOLO的實現方法
將一幅圖像分成SxS個網格(grid cell),如果某個object的中心落在這個網格中,則這個網格就負責預測這個object。
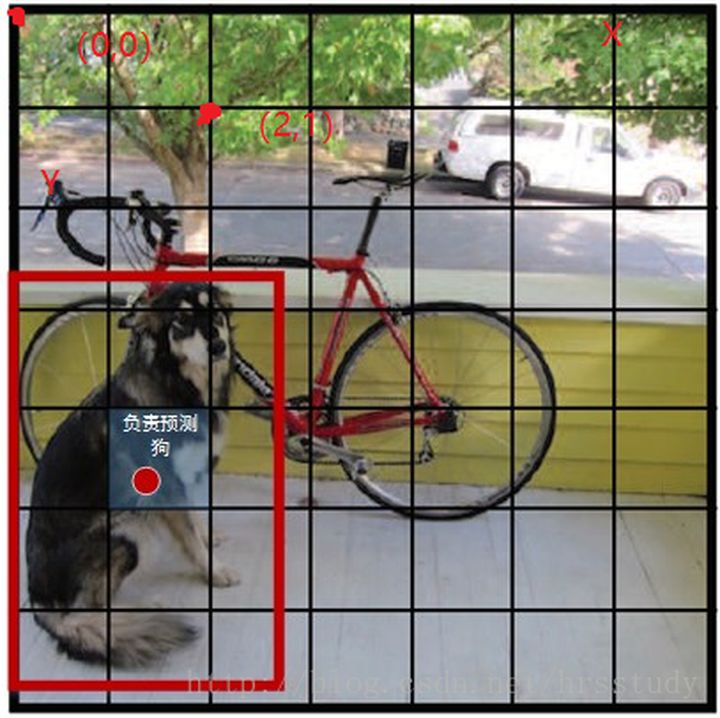
每個網格要預測B個bounding box,每個bounding box除了要回歸自身的位置之外,還要附帶預測一個confidence值。
這個confidence代表了所預測的box中含有object的置信度和這個box預測的有多準兩重信息,其值是這樣計算的:
Bbox置信度=P(Object)?IOUpredtruthBbox置信度 = P(Object) \ast IOU_{pred}^{truth} Bbox置信度=P(Object)?IOUpredtruth?
其中如果有object落在一個grid cell里,第一項取1,否則取0。 第二項是預測的bounding box和實際的groundtruth之間的IoU值。
每個bounding box要預測(x, y, w, h)和confidence共5個值,每個網格還要預測一個類別信息,記為C類。則 S?SS*SS?S 個網格,每個網格要預測B個bounding box還要預測C個categories。輸出就是 S?S?(5?B+C)S * S * (5*B+C)S?S?(5?B+C) 的一個tensor。
注意:class信息是針對每個網格的,confidence信息是針對每個bounding box的。
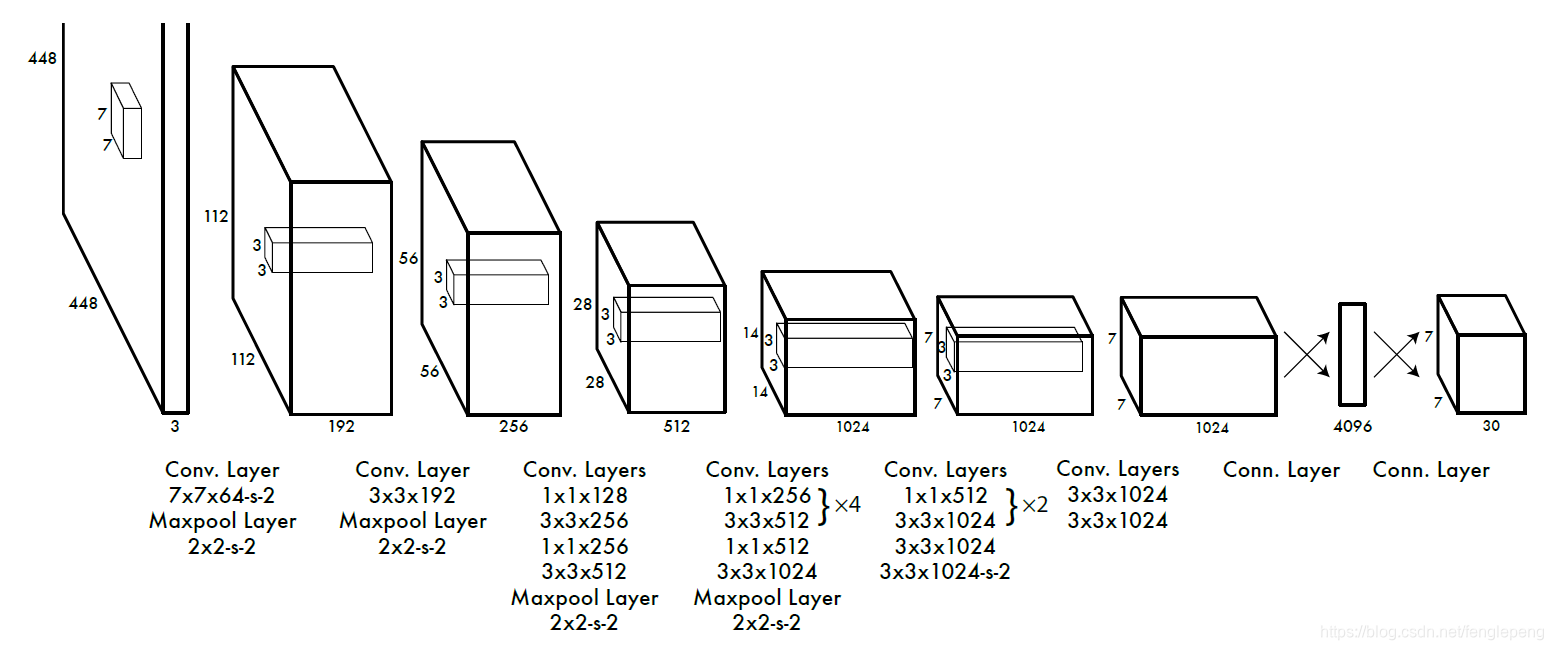
舉例說明: 在PASCAL VOC中,圖像輸入為448x448,取S=7,B=2,一共有20個類別(C=20)。則輸出就是7x7x(2x5+20)的一個tensor。
整個網絡結構如下圖所示:
在test的時候,每個網格預測的class信息和bounding box預測的confidence信息相乘,就得到每個bounding box的class-specific confidence score:
Pr(Classi∣Object)?Pr(Object)?IOUpredtruth=Pr(Classi)?IOUpredtruthPr(Class_{i}|Object) \ast Pr(Object) \ast IOU_{pred}^{truth} = Pr(Class_{i}) \ast IOU_{pred}^{truth} Pr(Classi?∣Object)?Pr(Object)?IOUpredtruth?=Pr(Classi?)?IOUpredtruth?
等式左邊第一項就是每個網格預測的類別信息,第二三項就是每個bounding box預測的confidence。這個乘積即encode了預測的box屬于某一類的概率,也有該box準確度的信息。
得到每個box的class-specific confidence score以后,設置閾值,濾掉得分低的 boxes,對保留的 boxes 進行NMS處理,就得到最終的檢測結果。
注意:
- 每個grid有30維,這30維中,8維是回歸box的坐標,2維是box的confidence,還有20維是類別。
- 其中坐標的x,y用對應網格的offset歸一化到0-1之間,w,h用圖像的width和height歸一化到0-1之間
簡單的概括就是:
(1) 給個一個輸入圖像,首先將圖像劃分成7*7的網格
(2) 對于每個網格,我們都預測2個邊框(包括每個邊框是目標的置信度以及每個邊框區域在多個類別上的概率)
(3) 根據上一步可以預測出772個目標窗口,然后根據閾值去除可能性比較低的目標窗口,最后NMS去除冗余窗口即可
損失函數
在實現中,最主要的就是怎么設計損失函數,讓這個三個方面得到很好的平衡。作者簡單粗暴的全部采用了sum-squared error loss來做這件事。 這種做法存在以下幾個問題:
- 第一,8維的localization error和20維的classification error同等重要顯然是不合理的;
- 第二,如果一個網格中沒有object(一幅圖中這種網格很多),那么就會將這些網格中的box的confidence push到0,相比于較少的有object的網格,這種做法是overpowering的,這會導致網絡不穩定甚至發散。
解決辦法:
- 更重視8維的坐標預測,給這些損失前面賦予更大的loss weight, 記為 λcoord\lambda_{coord}λcoord? 在pascal VOC訓練中取5。
- 對沒有object的box的confidence loss,賦予小的loss weight,記為λnoobj\lambda_{noobj}λnoobj?在pascal VOC訓練中取0.5。
- 有object的box的confidence loss和類別的loss的loss weight正常取1。
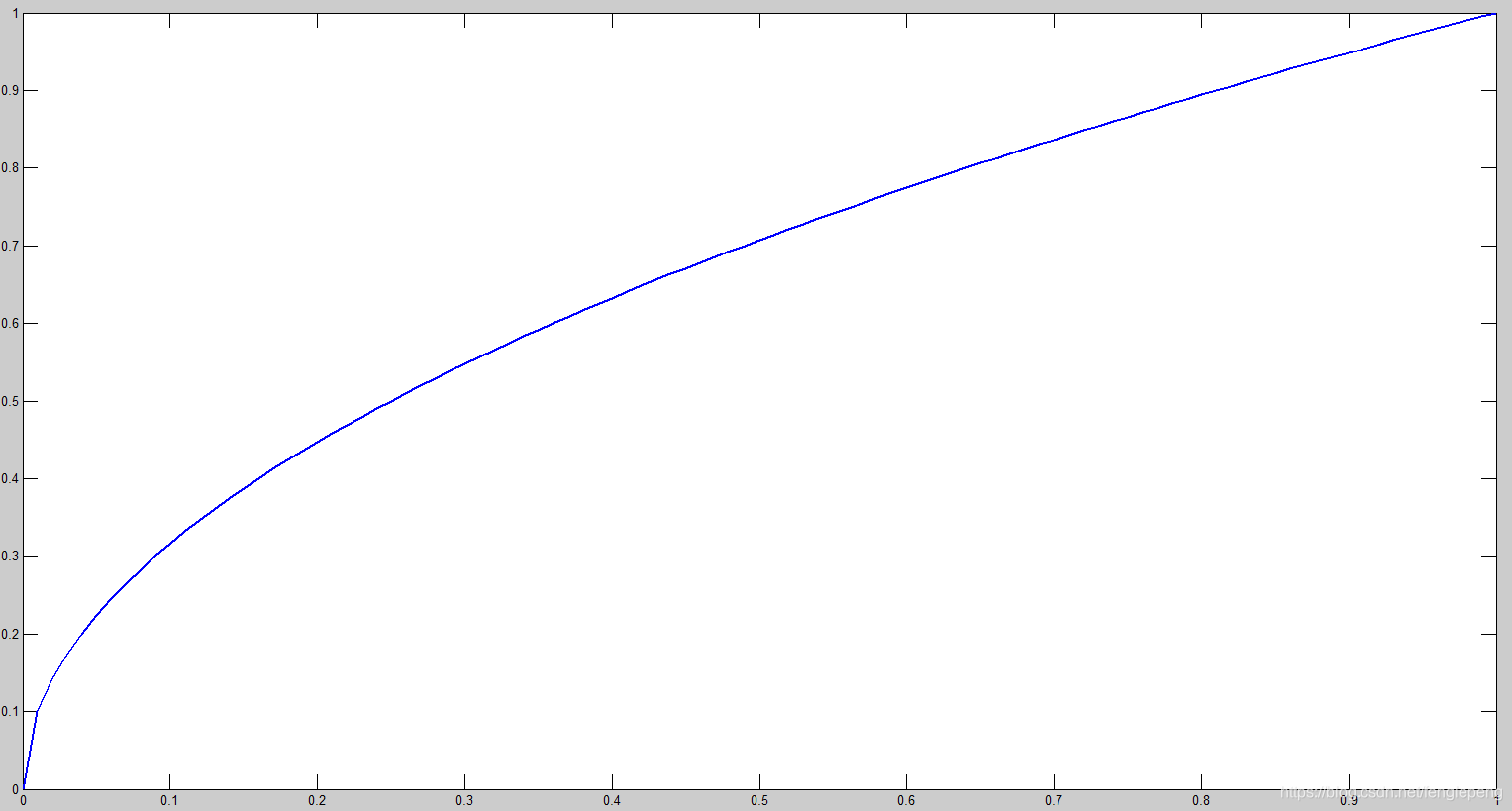
對不同大小的box預測中,相比于大box預測偏一點,小box預測偏一點肯定更不能被忍受的。而sum-square error loss中對同樣的偏移loss是一樣。 為了緩和這個問題,作者用了一個比較取巧的辦法,就是將box的width和height取平方根代替原本的height和width。這個參考下面的圖很容易理解,小box的橫軸值較小,發生偏移時,反應到y軸上相比大box要大。(也是個近似逼近方式)
一個網格預測多個box,希望的是每個box predictor專門負責預測某個object。具體做法就是看當前預測的box與ground truth box中哪個IoU大,就負責哪個。這種做法稱作box predictor的specialization。
最后整個的損失函數如下所示:
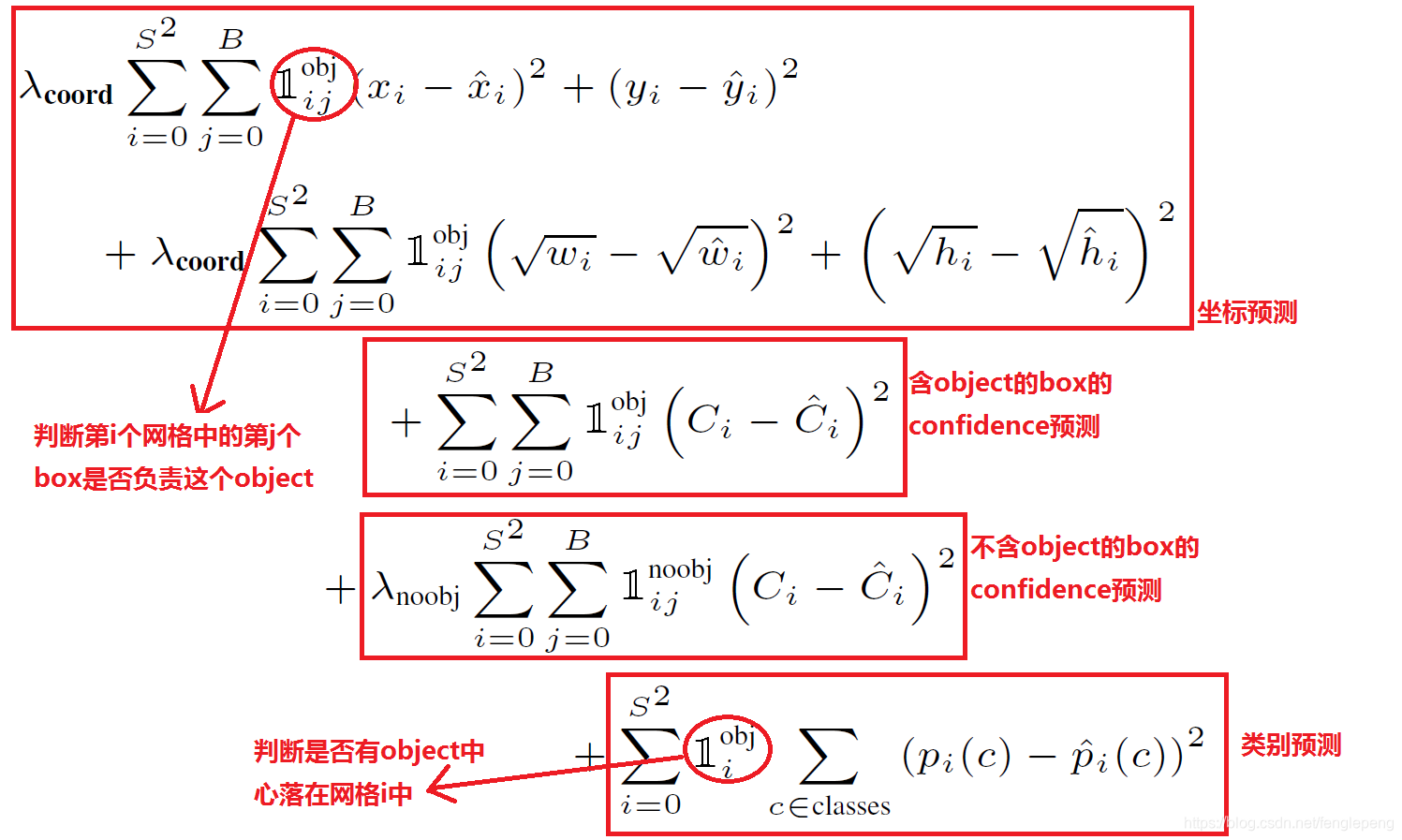
損失由三部分組成,分別是:坐標預測損失、置信度預測損失、類別預測損失。
使用的是差方和誤差。需要注意的是,w和h在進行誤差計算的時候取的是它們的平方根,原因是對不同大小的bounding box預測中,相比于大bounding box預測偏一點,小box預測偏一點更不能忍受。而差方和誤差函數中對同樣的偏移loss是一樣。 為了緩和這個問題,作者用了一個比較取巧的辦法,就是將bounding box的w和h取平方根代替原本的w和h。
定位誤差比分類誤差更大,所以增加對定位誤差的懲罰,使 λcoord=5λ_{coord}=5λcoord?=5。
在每個圖像中,許多網格單元不包含任何目標。訓練時就會把這些網格里的框的“置信度”分數推到零,這往往超過了包含目標的框的梯度。從而可能導致模型不穩定,訓練早期發散。因此要減少了不包含目標的框的置信度預測的損失,使 λnoobj=0.5λ_{noobj}=0.5λnoobj?=0.5。
1iobj1_{i}^{obj}1iobj? 表示網格 i 中存在對象。
1ijobj1_{ij}^{obj}1ijobj? 表示 網格 i 的第 j 個 Bbox 中存在對象。
1ijnoobj1_{ij}^{noobj}1ijnoobj?表示網格 i 的第 j 個 Bbox 中不存在對象。
這個損失函數中:
- 只有當某個網格中有object的時候才對classification error進行懲罰。
- 只有當某個box predictor對某個ground truth box負責的時候,才會對box的coordinate error進行懲罰,而對哪個ground truth box負責就看其預測值和ground truth box的IoU是不是在那個cell的所有box中最大。
其他細節,例如使用激活函數使用leak RELU,模型用ImageNet預訓練等等,在這里就不一一贅述了。
優點
- YOLO檢測速度非常快。標準版本的YOLO可以每秒處理 45 張圖像;YOLO的極速版本每秒可以處理150幀圖像。這就意味著 YOLO 可以以小于 25 毫秒延遲,實時地處理視頻。對于欠實時系統,在準確率保證的情況下,YOLO速度快于其他方法。
- YOLO 實時檢測的平均精度是其他實時監測系統的兩倍。
- 遷移能力強,能運用到其他的新的領域(比如藝術品目標檢測)。
YOLO的缺點
-
由于輸出層為全連接層,因此在檢測時,YOLO訓練模型只支持與訓練圖像相同的輸入分辨率
-
YOLO采用了多個下采樣層,網絡學到的物體特征并不精細,因此也會影響檢測效果。
-
雖然每個格子可以預測B個bounding box,但是最終只選擇只選擇IOU最高的bounding box作為物體檢測輸出,即每個格子最多只預測出一個物體。當物體占畫面比例較小,如圖像中包含畜群或鳥群時,每個格子包含多個物體,但卻只能檢測出其中一個。這是YOLO方法的一個缺陷。
-
YOLO loss函數中,大物體IOU誤差和小物體IOU誤差對網絡訓練中loss貢獻值接近(雖然采用求平方根方式,但沒有根本解決問題)。因此,對于小物體,小的IOU誤差也會對網絡優化過程造成很大的影響,從而降低了物體檢測的定位準確性。
-
由于損失函數的問題,定位誤差是影響檢測效果的主要原因。尤其是大小物體的處理上,還有待加強。
-
YOLO方法模型訓練依賴于物體識別標注數據,因此,對于非常規的物體形狀或比例,YOLO的檢測效果并不理想。同一類物體出現的新的不常見的長寬比和其他情況時,泛化能力偏弱。



)















