上期的筆記,瀏覽快1萬了,既然關注的人很多,那就發出來承諾過的算法全模擬,希望幫到你們。
上期的操作系統學霸筆記,考試復習面試全靠它
一、模擬進程調度
功能
data.h
#ifndef _Data_h_
#define _Data_h_#include <stdio.h>
#include <stdlib.h>
#include <string.h>#define ElemType PCB
#define Status int
#define OK 1
#define ERROR 0
#define TimeSlice 1
#define Infinity 10 //INT_MAX#define NAME_MAXSIZE 20
typedef enum
{Ready,Running,Block
}ProState;typedef enum
{FCFS, SPF //先來先服務,短進程優先
}PriorityRule;typedef struct
{char Name[NAME_MAXSIZE]; //進程名int Priority; //優先數int ArrivalTime; //到達時間 以時間片為單位int NeedRunningTime; //運行時間 以時間片為單位int StartTime; //開始執行時間int FinishTime; //完成時間int TimeUsedCPU; //已用CPU時間 以時間片為單位ProState ProcessState; //進程狀態
}PCB;typedef struct Node
{ElemType data;struct Node * Next;
}LNode,*LinkList;#endif
?ChainList.h
#ifndef _ChainList_h_
#define _ChainList_h_#include "Data.h"//功能:鏈表初始化
Status Init(LinkList *L);//功能:賦值運算,將e2賦值給e1
void Assignment(ElemType *e1, ElemType e2);//功能:獲取第i個結點元素
Status GetElemt_L(LinkList L,int i,ElemType *e);//功能:鏈表根據優先級插入元素
Status ListInsert_L(LinkList L,ElemType e);//功能:鏈表刪除頭結點
Status ListDelete_L(LinkList L,ElemType *e);#endifProPCB.h
#ifndef _ProPCB_h_
#define _ProPCB_h_#include "ChainList.h"//功能:將e插入鏈表Q
Status GetProcess(LinkList Q,ElemType e); //上就緒隊列//功能:根據不同的優先級規則,返回優先數
int GetPriority(ElemType *e, PriorityRule PR); //根據不同的規則PR 設置優先數//功能:將鏈表Q的頭結點數據放到e指向的內存,并刪除
Status OutProsess(LinkList Q,ElemType *e); //下就緒隊列//功能:CPU運行pcb指向的進程,并輸出所有進行進程狀態
Status CPURunPro(LinkList Q, PCB *pcb); //CPU運行PCB//功能:打印所有PCB信息
void PrintProQueue(LinkList Q, PCB *pcb); //打印運行后PCB信息//功能:當一個進程結束,打印進程信息
void PrintProResult(PCB *pcb);#endif實現
#include "ChainList.h"extern int CPUUsedTime;//功能:鏈表初始化
Status Init(LinkList *L)
{*L = (LinkList)malloc(sizeof(LNode));(*L)->data.NeedRunningTime = -1;(*L)->Next = NULL;return OK;
}//功能:賦值運算,將e2賦值給e1
void Assignment(ElemType *e1, ElemType e2)
{e1->ArrivalTime = e2.ArrivalTime;strcpy(e1->Name,e2.Name);e1->Priority = e2.Priority;e1->ProcessState = e2.ProcessState;e1->FinishTime = e2.FinishTime;e1->StartTime = e2.StartTime;e1->NeedRunningTime = e2.NeedRunningTime;e1->TimeUsedCPU = e2.TimeUsedCPU;
}//鏈表中按照優先級:從大到小排序插入
Status ListInsert_L(LinkList L,ElemType e) //這樣修改應該不對 p = *L出錯
{LinkList p = L->Next, pre = L, s;while (p && e.Priority <= p->data.Priority) {pre = p;p = p->Next;}s = (LinkList)malloc(sizeof(LNode));Assignment(&s->data, e);s->Next = pre->Next;pre->Next = s;return OK;
}
//鏈表中頭部刪除
Status ListDelete_L(LinkList L,ElemType *e)
{LinkList p = L, q;q = p->Next;if(!q)return ERROR;p->Next = q->Next;Assignment(e, q->data);free(q);return OK;
}#include "ProPCB.h"extern int CPUUsedTime;//功能:將e插入鏈表Q
Status GetProcess(LinkList Q,ElemType e)
{return ListInsert_L(Q, e);
}//功能:根據不同的優先級規則,返回優先數
int GetPriority(ElemType *e, PriorityRule PR)
{if(PR == FCFS)return Infinity - e->ArrivalTime;else if(PR == SPF)return Infinity - e->NeedRunningTime;elseprintf("GetPriority Function ERROR!\n");return ERROR;
}//功能:將鏈表Q的頭結點數據放到e指向的內存,并刪除
Status OutProsess(LinkList Q,ElemType *e)
{return ListDelete_L(Q ,e);
}//上一次CPU運行時間增加1個時間片
Status CPURunPro(LinkList Q,PCB *pcb)
{if(pcb->StartTime == -1)pcb->StartTime = CPUUsedTime;pcb->ProcessState = Running;//PrintProQueue(Q, pcb);pcb->TimeUsedCPU += TimeSlice;return OK;
}//功能:打印所有PCB信息
void PrintProQueue(LinkList Q, PCB *pcb)
{LinkList p = Q->Next;printf("進程名 優先數 到達時間 運行時間 已用CPU時間 完成時間 進程狀態\n");if(pcb)printf(" %4s %2d %4d %4d %3d(+1) %3d %4s \n",pcb->Name,pcb->Priority,pcb->ArrivalTime,pcb->NeedRunningTime,pcb->TimeUsedCPU, pcb->FinishTime,pcb->ProcessState == Ready ? "就緒" : "運行");while (p){printf(" %4s %2d %4d %4d %3d %3d %4s \n",p->data.Name,p->data.Priority,p->data.ArrivalTime,p->data.NeedRunningTime,p->data.TimeUsedCPU,p->data.FinishTime, p->data.ProcessState == Ready ? "就緒" : "運行");p = p->Next;}printf("-------------------------------------------------------------------------------\n");
}//功能:當一個進程結束,打印進程信息
void PrintProResult(PCB *pcb)
{printf("進程名 到達時刻 運行時間 開始時刻 完成時刻 周轉時間 帶權周轉時間 進程狀態\n");if(pcb)printf(" %2s %3d %4d %4d %3d %4d %5.2lf %4s \n",pcb->Name,pcb->ArrivalTime,pcb->NeedRunningTime,pcb->StartTime,pcb->FinishTime,pcb->FinishTime-pcb->ArrivalTime,((pcb->FinishTime - pcb->ArrivalTime)*1.0)/pcb->NeedRunningTime,"完成");printf("-------------------------------------------------------------------------------\n");
}main:
#include "ProPCB.h"/****************************
* 實驗01: 非搶占式靜態優先權 *
* ① 優先權始終保持不變 *
* ② 一旦進入CPU便運行到結束 *
* ③ FCFS只考慮到達時間進CPU *
* ④ SPF認為到達時間相同 *
****************************/int CPUUsedTime = 0;void InputData(LinkList * pPCBdata, PriorityRule PR)
{ElemType e = {{0},-1,-1,-1,-1,-1,0,Ready};e.ArrivalTime = 0;e.ProcessState = Ready;e.TimeUsedCPU = 0;strcpy(e.Name,"A");e.NeedRunningTime = 1;e.Priority = GetPriority(&e, PR);if(PR == SPF) e.ArrivalTime = 0;GetProcess(*pPCBdata,e);e.ArrivalTime = 1;e.ProcessState = Ready;e.TimeUsedCPU = 0;strcpy(e.Name,"B");e.NeedRunningTime = 100;e.Priority = GetPriority(&e, PR);if(PR == SPF) e.ArrivalTime = 0;GetProcess(*pPCBdata,e);e.ArrivalTime = 2;e.ProcessState = Ready;e.TimeUsedCPU = 0;strcpy(e.Name,"C");e.NeedRunningTime = 1;e.Priority = GetPriority(&e, PR);if(PR == SPF) e.ArrivalTime = 0;GetProcess(*pPCBdata,e);e.ArrivalTime = 3;e.ProcessState = Ready;e.TimeUsedCPU = 0;strcpy(e.Name,"D");e.NeedRunningTime = 100;e.Priority = GetPriority(&e, PR);if(PR == SPF) e.ArrivalTime = 0;GetProcess(*pPCBdata,e);}//void InputData1(LinkList * pPCBdata, PriorityRule PR)
//{
// ElemType e = {{0},-1,-1,-1,-1,-1,0,Ready};
// e.ArrivalTime = 0;
// e.ProcessState = Ready;
// e.TimeUsedCPU = 0;
// strcpy(e.Name,"A");
// e.NeedRunningTime = 4;
// e.Priority = GetPriority(&e, PR);
// if(PR == SPF) e.ArrivalTime = 0;
// GetProcess(*pPCBdata,e);
//
// e.ArrivalTime = 1;
// e.ProcessState = Ready;
// e.TimeUsedCPU = 0;
// strcpy(e.Name,"B");
// e.NeedRunningTime = 3;
// e.Priority = GetPriority(&e, PR);
// if(PR == SPF) e.ArrivalTime = 0;
// GetProcess(*pPCBdata,e);
//
// e.ArrivalTime = 2;
// e.ProcessState = Ready;
// e.TimeUsedCPU = 0;
// strcpy(e.Name,"C");
// e.NeedRunningTime = 5;
// e.Priority = GetPriority(&e, PR);
// if(PR == SPF) e.ArrivalTime = 0;
// GetProcess(*pPCBdata,e);
//
// e.ArrivalTime = 3;
// e.ProcessState = Ready;
// e.TimeUsedCPU = 0;
// strcpy(e.Name,"D");
// e.NeedRunningTime = 2;
// e.Priority = GetPriority(&e, PR);
// if(PR == SPF) e.ArrivalTime = 0;
// GetProcess(*pPCBdata,e);
//
// e.ArrivalTime = 4;
// e.ProcessState = Ready;
// e.TimeUsedCPU = 0;
// strcpy(e.Name,"E");
// e.NeedRunningTime = 4;
// e.Priority = GetPriority(&e, PR);
// if(PR == SPF) e.ArrivalTime = 0;
// GetProcess(*pPCBdata,e);
//}int main(void)
{LinkList PCBQueue; //InitPCBdata里面存放PCB初始數據ElemType e = {{0},-1,-1,-1,-1,-1,0,Ready};ElemType *pcb = NULL;PriorityRule PR;PR = FCFS; // SPF or FCFS//*********** 初始化就緒隊列 *************//Init(&PCBQueue);InputData(&PCBQueue, PR);printf("初始數據如下:\n");PrintProQueue(PCBQueue, pcb);//*********** 進程根據優先級上CPU *************//printf("\n進程運行信息如下:\n");while (OutProsess(PCBQueue, &e)){//一次性運行完畢while(e.TimeUsedCPU < e.NeedRunningTime) //上完CPU的進程是否完畢{CPURunPro(PCBQueue, &e); //上CPU++CPUUsedTime; //CPU時間增加}//*********** 當進程執行完畢時打印輸出 *************//e.FinishTime = CPUUsedTime;PrintProResult(&e);}getchar();return 0;
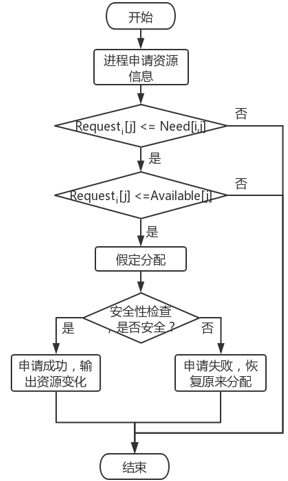
}二、模擬銀行家算法?
介紹
data.h
#ifndef _Data_h_
#define _Data_h_#include <stdio.h>
#include <stdlib.h>
#include <string.h>#define ElemType PCB
#define Status int
#define true 1
#define false 0
#define OK 1
#define ERROR 0
#define RESOURCE_NUM 3
#define MAX_RESOURCE_A_NUM 10
#define MAX_RESOURCE_B_NUM 5
#define MAX_RESOURCE_C_NUM 7
#define NAME_MAXSIZE 20
#define PCB_Num 5
typedef struct{int MaxNum[RESOURCE_NUM]; //需要每項資源個數int AllocationNum[RESOURCE_NUM]; //已占用每項資源個數int NeedNum[RESOURCE_NUM]; //還需要的每項資源個數
}ResourceList;typedef struct
{char Name[NAME_MAXSIZE]; //進程名ResourceList resList; //資源清單
}PCB;typedef struct Node
{ElemType data;struct Node * Next;
}LNode,*LinkList;#endif
chainlist.h
#ifndef _ChainList_h_
#define _ChainList_h_#include "Data.h"Status Init(LinkList *L);
void Assignment(ElemType *e1, ElemType e2);
Status ListInsert_L(LinkList L,ElemType e);#endif實現
ProPCB.h
#ifndef _ProPCB_h_
#define _ProPCB_h_#include "ChainList.h"
#include <string.h>
//上隊列
Status GetProcess(LinkList Q,ElemType e);
//銀行家算法
Status BankerAlgorithm(int *Allocation, int *Request,int i, int *Need, int *Available);
//安全性檢測算法
Status SecurityCheck(int *Allocation,int *Need, int *Available);
//分配資源
Status AllocateResource(LinkList PCBdata , int pos , int *Request);
//獲取資源矩陣
void GetMatrixData(LinkList PCBdata,int *Max,int *Allocation,int *Need,int *Available);
//打印進程資源信息
void PrintProQueue(LinkList L, int *A);
//得到指定PCB名的位置
void GetPos(LinkList L, char *name, int len, int *pos);
//對當前的請求進行預分配
void PreGrant(int* Allocation, int *Request,int pos,int *Need, int *Available);
//正式分配算法
void GrantSource(LinkList L, int *Request, int pos, int *Available);#endifchainlist.c
#include "ChainList.h"
extern int CPUUsedTime;
Status Init(LinkList *L)
{*L = (LinkList)malloc(sizeof(LNode));strcpy((*L)->data.Name, "");(*L)->Next = NULL;return OK;
}void Assignment(ElemType *e1, ElemType e2)
{int i = 0;strcpy(e1->Name,e2.Name);for(i = 0; i < RESOURCE_NUM; ++i){e1->resList.AllocationNum[i] = e2.resList.AllocationNum[i];e1->resList.MaxNum[i] = e2.resList.MaxNum[i];e1->resList.NeedNum[i] = e2.resList.NeedNum[i];}
}Status ListInsert_L(LinkList L,ElemType e) //這樣修改應該不對 p = *L出錯
{LinkList p = L, s;while (p->Next) p = p->Next;s = (LinkList)malloc(sizeof(LNode));Assignment(&s->data, e);s->Next = p->Next;p->Next = s;return OK;
}ProPCB.c
#include "ProPCB.h"Status GetProcess(LinkList Q,ElemType e)
{return ListInsert_L(Q, e);
}Status AllocateResource(LinkList PCBdata , int pos , int *Request)
{int i = 1;LNode *p = PCBdata->Next;while (p && i < pos){p = p->Next;++i;}if(!p || i > pos)return ERROR;for (i = 0; i < RESOURCE_NUM; ++i){p->data.resList.AllocationNum[i] += Request[i];p->data.resList.NeedNum[i] -= Request[i];}return OK;
}
void GetMatrixData(LinkList PCBdata,int *Max,int *Allocation,int *Need,int *Available)
{LNode *p;int i, j, c = RESOURCE_NUM;Available[0] = Available[1] = Available[2] = 0;for(p = PCBdata->Next, i = 0; p; p = p->Next, ++i){for(j = 0; j < RESOURCE_NUM; ++j){Max[i * c + j] = p->data.resList.MaxNum[j];Allocation[i * c + j] = p->data.resList.AllocationNum[j];Need[i * c + j] = p->data.resList.NeedNum[j];}Available[0] += Allocation[i * c + 0];Available[1] += Allocation[i * c + 1];Available[2] += Allocation[i * c + 2];}Available[0] = MAX_RESOURCE_A_NUM - Available[0];Available[1] = MAX_RESOURCE_B_NUM - Available[1];Available[2] = MAX_RESOURCE_C_NUM - Available[2];
}void PrintProQueue(LinkList L,int *available)
{int i = 0;L = L->Next;printf(" -------------------------------------------------------------\n");printf("|進程名 | Max | Allocation | Need | Available |\n");printf("| | A B C | A B C | A B C | A B C |\n");while(L){printf("| %s | %d %d %d | %d %d %d | %d %d %d | %d %d %d |\n",L->data.Name, L->data.resList.MaxNum[0], L->data.resList.MaxNum[1], L->data.resList.MaxNum[2],L->data.resList.AllocationNum[0],L->data.resList.AllocationNum[1],L->data.resList.AllocationNum[2],L->data.resList.NeedNum[0],L->data.resList.NeedNum[1],L->data.resList.NeedNum[2],available[0], available[1], available[2]);L = L->Next;}printf(" -------------------------------------------------------------\n");}//安全性檢測算法
Status SecurityCheck(int *Allocation,int *Need, int *Available)
{/ 以下補充 //int work[RESOURCE_NUM];int Finish[PCB_Num];int k, i, j, t, f;int flag;//初始化工作向量和標記數組memcpy(work, Available, sizeof work);memset(Finish, 0, sizeof Finish);//最多檢測PCB_Num次for(k = 0; k < PCB_Num; ++k){flag = 0;for(i = 0; i < PCB_Num; ++i){//已經被訪問if(Finish[i]){continue;}//檢測是否所有資源都能被分配for(j = 0; j < RESOURCE_NUM; ++j){if(!(Need[i * 3 + j] <= work[j])){break;}}//可以滿足,回收if(j == RESOURCE_NUM){for(t = 0; t < RESOURCE_NUM; ++t){work[t] += Allocation[i * 3 + t];}Finish[i] = 1;flag = 1;break;}}//為進行分配,跳出循環if(!flag){break;}}for(f = 0; f < PCB_Num; ++f){//只要有一個進程不滿足,跳出循環if(!Finish[f]){return ERROR;}}return OK;
}//銀行家算法
Status BankerAlgorithm(int* Allocation, int *Request,int pos,int *Need, int *Available)
{/ 以下補充 //int i;//檢查請求的是否大于需要的for(i = 0; i < RESOURCE_NUM; ++i){if(Request[i] > Need[pos*3 + i]){return ERROR;}}//檢查請求的是否大于可分配的for(i = 0; i < RESOURCE_NUM; ++i){if(Request[i] > Available[i]){return ERROR;}}//進行預分配PreGrant(Allocation, Request, pos, Need, Available);//進行安全性檢測if(!SecurityCheck(Allocation, Need, Available)){return ERROR;}return OK;
}//根據PCB的名字得到該PCB在鏈表中的位置
void GetPos(LinkList L, char *name, int len, int *pos)
{LinkList p = L->Next;char PcbName[NAME_MAXSIZE];memcpy(PcbName, name, (len + 1) * sizeof(char));(*pos) = 0;while(p){if(strcmp(p->data.Name, PcbName)){(*pos)++;p = p->Next;} else {break;}}
}//預分配算法
void PreGrant(int* Allocation, int *Request,int pos,int *Need, int *Available){int i;//1. Need減去請求的for(i = 0; i < RESOURCE_NUM; ++i){Need[pos*3 + i] -= Request[i];}//2. Available減去請求的for(i = 0; i < RESOURCE_NUM; ++i){Available[i] -= Request[i];}//3. Allocation加上請求的for(i = 0; i < RESOURCE_NUM; ++i){Allocation[pos*3 + i] += Request[i];}
}/*** 1.首先對請求資源的進程進行分配資源* 2.如果給該進程分配資源之后,該進程所需的資源等于已經得到的資源,那么對其擁有的資源進行回收*///正式分配算法,pos從0開始標記
void GrantSource(LinkList L, int *Request, int pos, int *Available){LinkList p = L->Next;int tag = 0;int i;int flag = 0;if(tag < pos && NULL != p){p = p->Next;tag++;}if(p){//已獲得的加上請求的for(i = 0; i < RESOURCE_NUM; ++i){p->data.resList.AllocationNum[i] += Request[i];}//還需要的減去請求的for(i = 0; i < RESOURCE_NUM; ++i){p->data.resList.NeedNum[i] -= Request[i];}//可利用的減去請求的for(i = 0; i < RESOURCE_NUM; ++i){Available[i] -= Request[i];}//如果進行分配之后該進程最大所需資源數目等于已獲得的資源數目,則對資源進行回收flag = 0;for(i = 0; i < RESOURCE_NUM; ++i){if(p->data.resList.AllocationNum[i] != p->data.resList.MaxNum[i]){flag = 1;break;}}if(!flag){for(i = 0; i < RESOURCE_NUM; ++i){Available[i] += p->data.resList.AllocationNum[i];}}}
}
main
#include "ProPCB.h"void InputData(LinkList * pPCBdata)
{ElemType e = {{0},{{0},{0},{0}}};strcpy(e.Name,"P0");e.resList.MaxNum[0] = 7; e.resList.MaxNum[1] = 5; e.resList.MaxNum[2] = 3;e.resList.AllocationNum[0] = 0;e.resList.AllocationNum[1] = 1;e.resList.AllocationNum[2] = 0;e.resList.NeedNum[0] = 7; e.resList.NeedNum[1] = 4; e.resList.NeedNum[2] = 3; GetProcess(*pPCBdata,e);strcpy(e.Name,"P1");e.resList.MaxNum[0] = 3; e.resList.MaxNum[1] = 2; e.resList.MaxNum[2] = 2;e.resList.AllocationNum[0] = 2;e.resList.AllocationNum[1] = 0;e.resList.AllocationNum[2] = 0;e.resList.NeedNum[0] = 1; e.resList.NeedNum[1] = 2; e.resList.NeedNum[2] = 2; GetProcess(*pPCBdata,e);strcpy(e.Name,"P2");e.resList.MaxNum[0] = 9; e.resList.MaxNum[1] = 0; e.resList.MaxNum[2] = 2;e.resList.AllocationNum[0] = 3;e.resList.AllocationNum[1] = 0;e.resList.AllocationNum[2] = 2;e.resList.NeedNum[0] = 6; e.resList.NeedNum[1] = 0; e.resList.NeedNum[2] = 0; GetProcess(*pPCBdata,e);strcpy(e.Name,"P3");e.resList.MaxNum[0] = 2; e.resList.MaxNum[1] = 2; e.resList.MaxNum[2] = 2;e.resList.AllocationNum[0] = 2;e.resList.AllocationNum[1] = 1;e.resList.AllocationNum[2] = 1;e.resList.NeedNum[0] = 0; e.resList.NeedNum[1] = 1; e.resList.NeedNum[2] = 1; GetProcess(*pPCBdata,e);strcpy(e.Name,"P4");e.resList.MaxNum[0] = 4; e.resList.MaxNum[1] = 3; e.resList.MaxNum[2] = 3;e.resList.AllocationNum[0] = 0;e.resList.AllocationNum[1] = 0;e.resList.AllocationNum[2] = 2;e.resList.NeedNum[0] = 4; e.resList.NeedNum[1] = 3; e.resList.NeedNum[2] = 1; GetProcess(*pPCBdata,e);
}
int main(void)
{LinkList PCBdata; //PCBdata里面存放原始數據ElemType e = {{0},{{0},{0},{0}}};char PcbName[NAME_MAXSIZE], chioce;int Max[PCB_Num][RESOURCE_NUM] = {0}, Allocation[PCB_Num][RESOURCE_NUM] = {0};int Need[PCB_Num][RESOURCE_NUM] = {0}, Available[RESOURCE_NUM] = {0};int Request[RESOURCE_NUM] = {0}, pos = 0;LNode *p = NULL;int i;/ 以下補充 ////初始化就緒隊列Init(&PCBdata);//數據輸入InputData(&PCBdata);while(1){//獲取所有PCB中的資源信息GetMatrixData(PCBdata, *Max, *Allocation, *Need, Available);//打印當前系統的狀態PrintProQueue(PCBdata, Available);//接受請求printf("請輸入申請資源的進程名,資源A,資源B,資源C申請量(空格隔開):");scanf("%s", PcbName);for(i = 0; i < RESOURCE_NUM; ++i){scanf("%d", &Request[i]);}//獲取相應的PCB在鏈表中的位置GetPos(PCBdata, PcbName, strlen(PcbName), &pos);//跑銀行家算法,根據返回值的狀態判斷是否安全,//如果安全,進行正式分配,否則僅僅打印不安全信息if(BankerAlgorithm(*Allocation, Request, pos, *Need, Available)){//正式分配資源GrantSource(PCBdata, Request, pos, Available);//分配完成后,打印資源的信息GetMatrixData(PCBdata, *Max, *Allocation, *Need, Available);PrintProQueue(PCBdata, Available);printf("請安任意鍵繼續. . . ");getchar();getchar();} else {printf("不安全,不可分配!\n");}}return 0;
}
三、模擬固定分區分配?
介紹
data.h
#ifndef _Data_h_
#define _Data_h_#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#define LIST_INIT_SIZE 10
#define LISTINCREMENT 2
#define true 1
#define false 0
#define PCBType PCB
#define Status int
#define OK 1
#define ERROR 0
#define NAME_MAXSIZE 20
#define PCB_Num 5
#define LIST_INITSIZE 10
#define PartiType PartitionInfo
#define TotalMemory 512 //KBtypedef enum
{Unallocated, Allocated
}DistributState, PartitionSt;typedef enum
{FirstPriority, BestAdapt
}AllocatStrategy;typedef struct
{char Name[NAME_MAXSIZE]; //進程名int MemorySize; //內存的大小int StartAddress; //內存起始地址DistributState DistbutSt; //分配狀態
}PCB;typedef struct Node
{PCBType data;struct Node * Next;
}LNode, *LinkList, *PCBList; //typedef struct {//分區號用數組下標代替int PartitionSize;int PartStartAddr;char Name[NAME_MAXSIZE];//若為空,則分區空閑
}PartitionInfo;typedef struct
{PartiType *elem;int listsize; //表容量int length; //元素個數
}SqList, PartTable; //分區表#endif
list.h
#ifndef _List_h_
#define _List_h_#include "Data.h"//******* 鏈表 *******//
Status InitLinkList(LinkList *L);
void PCBAssign(PCBType *e1, PCBType e2);
Status GetElemt_L(LinkList L,int i,PCBType *e);
Status ListInsert_L(LinkList L,PCBType e);
Status ListDelete_L(LinkList L,int i,PCBType *e);//****** 動態順序表 ******//
void PartiAssign(PartiType *e1, PartiType e2);
Status InitList_Sq(SqList *L);
Status ListInsert_Sq(SqList *L,int i,PartiType e);
Status ListDelete_Sq(SqList *L,int i,PartiType *e);#endif?
#ifndef _MemoryManage_h_
#define _MemoryManage_h_#include "List.h"//***** PCB鏈表操作 *****//
Status InsertProcess(LinkList Q,PCBType e);
Status DeleteProsess(LinkList Q,int i,PCBType *e);
//***** 分區表操作 *****//
Status InsertTable(SqList *L, int i, PartiType e);
Status DeleteTable(SqList *L, int i, PartiType *e);
int SelectPart(PCB* pPCB, SqList *pPartTable);
int MallocMemory(PCB *pe, SqList *pPartTable, int pos);
void SearchSpace(PCBList PCBdata, SqList partTable);
void FreeMemory(int pos, SqList *pPartTable);
void InitAllocation(PCBList PCBdata, PartTable partTable);
void PrintProQueue(LinkList L);
void PrintPartTable(PartTable L);#endif實現
list.c
#include "List.h"Status InitLinkList(LinkList *L)
{*L = (LinkList)malloc(sizeof(LNode));strcpy((*L)->data.Name, "");(*L)->Next = NULL;return OK;
}void PCBAssign(PCBType *e1, PCBType e2)
{strcpy(e1->Name,e2.Name);e1->DistbutSt = e2.DistbutSt;e1->MemorySize = e2.MemorySize;e1->StartAddress = e2.StartAddress;
}Status GetElemt_L(LinkList L,int i,PCBType *e)
{LinkList p = L->Next; //指向第j個結點int j = 1; //從第一個開始往后找while ( p && j < i ) //p不為空且j < i{p = p->Next;++j;} //p為空,說明鏈表循環結束,也沒有到第i個結點 j==iif (!p || j > i) //因為此處對i 沒有做判斷 如果 i==0 或 負數 條件成立//對于 i == j == 1 的情況則不用循環正好 返回{return ERROR;}*e = p->data; //通過尋址改變了 該地址內存中元素的值return OK;
}
//鏈表中按照優先級:從大到小排序插入
Status ListInsert_L(LinkList L,PCBType e) //這樣修改應該不對 p = *L出錯
{LinkList p = L, s;while (p->Next) p = p->Next;s = (LinkList)malloc(sizeof(LNode));PCBAssign(&s->data, e);s->Next = p->Next;p->Next = s;return OK;
}
//鏈表中頭部刪除
Status ListDelete_L(LinkList L,int i,PCBType *e)
{LinkList p = L, q;int j = 0;while (p->Next && j < i-1){p = p->Next; ++j;}if(!p->Next || j > i - 1)return ERROR;q = p->Next;p->Next = q->Next;PCBAssign(e, q->data);free(q);return OK;
}// 初始化 ///
void PartiAssign(PartiType *e1, PartiType e2)
{e1->PartitionSize = e2.PartitionSize;e1->PartStartAddr = e2.PartStartAddr;strcpy(e1->Name, e2.Name);
}Status InitList_Sq(SqList *L)
{//構造一個空的線性表LL->elem = (PartiType *)malloc((LIST_INIT_SIZE)*sizeof(PartiType));if(!L->elem) return ERROR; //存儲分配失敗L->length = 0; //空表長度為0L->listsize = LIST_INIT_SIZE; //初始存儲的容量return OK;
}//在順序線性表L中第i個位置之前插入新的元素e
Status ListInsert_Sq(SqList *L,int i,PartiType e)
{//在順序線性表L中第i個位置之前插入新的元素e//i的合法值為1 <= i <= ListLength_Sq(L)+1PartiType *q, *p, *newbase;if(i < 1 || i > L->length + 1 ) return ERROR; //i值不合法if(L->length >= L->listsize){ //當前存儲空間已滿,增加分配newbase = (PartiType *)realloc(L->elem,(L->listsize + LISTINCREMENT)*sizeof(PartiType));if(!newbase) return ERROR; //存儲分配失敗L->elem = newbase; //新基址L->listsize += LISTINCREMENT; //增加存儲容量} q = &(L->elem[i - 1]); //q為插入位置for(p = &(L->elem[L->length-1]);p >= q; --p)PartiAssign((p+1),*p); //插入位置及之后的元素右移PartiAssign(q ,e); //插入eL->length++;return OK;
}//在順序線性表L中刪除第i個元素,并用e返回其值
Status ListDelete_Sq(SqList *L,int i,PartiType *e)
{//在順序線性表L中刪除第i個元素,并用e返回其值//i的合法值為1 <= i <= ListLength_Sq(L)PartiType *p,*q;if((i < 1) || (i > L->length)) return ERROR; //i值不合法p = &(L->elem[i-1]); //p為被刪除元素的位置PartiAssign(e, *p); //將被刪除元素的值賦給e (待定)q = L->elem + L->length-1; //移動到表尾元素的位置for (++p;p<=q;++p)PartiAssign((p-1), *p); //被刪除元素之后的元素左移L->length--;return OK;
}memoryManage.c
#include "MemoryManage.h"//***** PCB鏈表操作 *****//
Status InsertProcess(LinkList Q,PCBType e)
{return ListInsert_L(Q, e);
}Status DeleteProsess(LinkList Q,int i,PCBType *e)
{return ListDelete_L(Q ,i,e);
}//***** 分區表操作 *****//
Status InsertTable(SqList *L, int i, PartiType e)
{return ListInsert_Sq(L,i, e);
}Status DeleteTable(SqList *L, int i, PartiType *e)
{return ListDelete_Sq(L, i, e);
}//返回第幾個內存塊,從1開始,若返回0,則代表錯誤
int SelectPart(PCB* pPCB, SqList *pPartTable)
{int i,Start;if(pPCB->MemorySize <= 16)Start = 0;else if(pPCB->MemorySize <= 32)Start = 1;else if(pPCB->MemorySize <= 64)Start = 2;else if(pPCB->MemorySize <= 128)Start = 3;else if(pPCB->MemorySize <= 256)Start = 4;else{printf("內存過大,無法裝入!\n");return ERROR;}for (i = Start; i < pPartTable->length; ++i)if(!strcmp(pPartTable->elem[i].Name, ""))return i + 1;return ERROR;
}//i傳遞的是下標
int MallocMemory(PCB *pe, SqList *pPartTable,int i)
{/// 以下需要補充 /pe->DistbutSt = Allocated;pe->StartAddress = pPartTable->elem[i].PartStartAddr;strcpy(pPartTable->elem[i].Name, pe->Name);return OK;
}/*** PCBdata:表示PCB鏈* partTable:分區表* 將每一個PCB取出,查找是否有合適的分區可以分配給他,如果有分配,如果沒有不分配*/
void InitAllocation(PCBList PCBdata, PartTable partTable)
{/// 以下需要補充 /PCBList L = PCBdata->Next;int pos;while(L){pos = SelectPart(&L->data, &partTable);if(pos == 0) {printf("無法為%s進程分配空間!!!\n", L->data.Name);} else {L->data.DistbutSt = Allocated;L->data.StartAddress = partTable.elem[pos-1].PartStartAddr;strcpy(partTable.elem[pos-1].Name, L->data.Name);}L = L->Next;}//SearchSpace(PCBdata, partTable);
}void FreeMemory(int pos, SqList *pPartTable)
{/// 以下需要補充 /strcpy(pPartTable->elem[pos].Name, "");
}void SearchSpace(PCBList PCBdata, SqList partTable)
{int pos;LNode *p;p = PCBdata->Next;while (p){if(p->data.DistbutSt == Unallocated){pos = SelectPart(&(p->data), &partTable);//從1開始if(pos){MallocMemory(&(p->data), &partTable, pos - 1);break;}}p = p->Next;}}void PrintProQueue(LinkList L)
{int i = 0;L = L->Next;printf(" ----------------------------------------\n");printf("|進程名 | 起始位置 | 申請大小 | 是否分配 |\n");while(L){printf("| %s | %4d | %4d | %4s |\n",L->data.Name, L->data.StartAddress, L->data.MemorySize, L->data.DistbutSt == Allocated? "是" : "否");L = L->Next;}printf(" ----------------------------------------\n");
}void PrintPartTable(PartTable L)
{int i = 0, j = 0;printf(" ----------------------------------------\n");printf("|分區號 | 起始位置 | 分區大小 | 是否分配 |\n");for (i = 0; i < L.length; ++i)printf("| %2d | %4d | %4d | %4s |\n",i + 1 , L.elem[i].PartStartAddr, L.elem[i].PartitionSize , strcmp(L.elem[i].Name, "") ? L.elem[i].Name :"否");printf(" ----------------------------------------\n");
}main
#include "MemoryManage.h"/*實驗06 固定分區分配
* 分配策略:
* ①離隊首最近,能夠裝入該分區的進程;
* ②搜索能夠裝入該分區最大的進程。
*/void InputPCBData(PCBList * pPCBdata)
{PCBType e = {{0}, 0, 0, Unallocated};strcpy(e.Name,"P1");e.MemorySize = 16;InsertProcess(*pPCBdata,e);strcpy(e.Name,"P2");e.MemorySize = 32;InsertProcess(*pPCBdata,e);strcpy(e.Name,"P3");e.MemorySize = 48;InsertProcess(*pPCBdata,e);strcpy(e.Name,"P4");e.MemorySize = 96;InsertProcess(*pPCBdata,e);strcpy(e.Name,"P5");e.MemorySize = 100;InsertProcess(*pPCBdata,e);
}void SetFixedZone(PartTable * pPartdata)
{PartiType se = {0, 0, Unallocated };se.PartStartAddr = 16;se.PartitionSize = 16;InsertTable(pPartdata, 1, se);se.PartStartAddr = 32;se.PartitionSize = 32;InsertTable(pPartdata, 2, se);se.PartStartAddr = 64;se.PartitionSize = 64;InsertTable(pPartdata, 3, se);se.PartStartAddr = 128;se.PartitionSize = 128;InsertTable(pPartdata, 4, se);se.PartStartAddr = 256;se.PartitionSize = 256;InsertTable(pPartdata, 5, se);}
//0 - 15Kb 操作系統占用 總大小512KB
int main(void)
{PCBList PCBdata; //PCBdata里面存放原始PCB數據PartTable partTable; //分區表char PcbName[NAME_MAXSIZE] = {0}, choice;PCBType PCBe = {{0}, 0, 0, Unallocated};PartiType Parte = {0, 0};PCBType tmp;PCBType *pcb = NULL;LNode *p; PCBList pl = NULL;int tpos = 0;int startAddress;int i, size, pos, j;InitList_Sq(&partTable);SetFixedZone(&partTable);InitLinkList(&PCBdata);InputPCBData(&PCBdata);InitAllocation(PCBdata, partTable);PrintProQueue(PCBdata);PrintPartTable(partTable);while(true){system("cls");PrintProQueue(PCBdata);PrintPartTable(partTable);printf(" ================================================\n");printf("| 1.結 束 進 程 |\n");printf("| 2.添 加 進 程 |\n");printf("| 3.退 出 系 統 |\n");printf(" ================================================\n");printf("請選擇:");fflush(stdin);scanf("%d",&choice);//printf("haha");switch (choice){/// 以下需要補充 /case 1:printf("要結束的進程名:");scanf("%s", PcbName);//找到指定進程的位置,pl = PCBdata->Next;startAddress = -1;tpos = 0;while(pl){tpos++;if(!strcmp(pl->data.Name, PcbName) && pl->data.DistbutSt == Allocated){startAddress = pl->data.StartAddress;break;}pl = pl->Next;}if(startAddress == -1){printf("進程不存在!!!\n");break;}//刪除進程DeleteProsess(PCBdata, tpos, &tmp);//根據起始地址找到要回收的分區for(j = 0; j < partTable.length; ++j){if(partTable.elem[j].PartStartAddr == startAddress){tpos = j;break;}}//回收內存FreeMemory(tpos, &partTable);//重新檢查是否可以為其他進程分配SearchSpace(PCBdata, partTable);break;case 2:printf("請輸入添加的進程名和所占分區的大小:");scanf("%s %d", PcbName, &size);strcpy(PCBe.Name, PcbName);PCBe.MemorySize = size;PCBe.DistbutSt = Unallocated;PCBe.StartAddress = 0;InsertProcess(PCBdata, PCBe);SearchSpace(PCBdata, partTable);break;case 3:exit(0);break;}PrintProQueue(PCBdata);PrintPartTable(partTable);system("pause");}return 0;
}四、模擬基本分頁存儲
介紹
data.h
#ifndef _Data_h_
#define _Data_h_#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <math.h>#define LIST_INIT_SIZE 10
#define LISTINCREMENT 2
#define true 1
#define false 0
#define PCBType PCB
#define Status int
#define OK 1
#define ERROR 0
#define NAME_MAXSIZE 20
#define PCB_Num 5
#define LIST_INITSIZE 10
#define PartiType PartitionInfo
#define BlockNumType PageData //分頁信息
#define TotalMemory 512 //KB
#define PageSize 16 //通常為1 ~ 8KB //進程申請內存的大小[16, 256]KB 256 / 8 = 32頁typedef enum
{Unallocated, Allocated
}DistributState, PartitionSt;typedef struct {//分區號用數組下標代替int PartStartAddr;char Name[NAME_MAXSIZE];//若為空,則分區空閑
}PartitionInfo;typedef struct
{PartitionInfo *elem;int listsize; //表容量int length; //元素個數
}SqList_f, PartTable; //分區使用說明表typedef struct { int BlockNum; //塊號DistributState DistbutSt; //分配狀態
}PageData;typedef struct
{PageData *elem; int listsize; int length;
}SqList_y, PageTable; //頁表typedef struct
{char Name[NAME_MAXSIZE]; //進程名int MemorySize; //內存的大小PageTable *pPagetable; //頁表指針
}PCB;typedef struct Node
{PCBType data;struct Node * Next;
}LNode, *LinkList, *PCBList;#endif
list.h
#ifndef _List_h_
#define _List_h_#include "Data.h"//******* 鏈表 *******//
Status InitLinkList(LinkList *L);
void PCBAssign(PCBType *e1, PCBType e2);
Status GetElemt_L(LinkList L,int i,PCBType *e);
Status ListInsert_L(LinkList L,PCBType e);
Status ListDelete_L(LinkList L,int i,PCBType *e);//****** 分區使用說明表 ******//
void PartiAssign_f(PartiType *e1, PartiType e2);
Status InitList_f(SqList_f *L);
Status ListInsert_f(SqList_f *L,int i,PartiType e);
Status ListDelete_f(SqList_f *L,int i,PartiType *e);//****** 頁表 ******//
void PartiAssign_y(BlockNumType *e1, BlockNumType e2);
Status InitList_y(SqList_y **L);
Status ListInsert_y(SqList_y *L,int i,BlockNumType e);
Status ListDelete_y(SqList_y *L,int i,BlockNumType *e);#endifmemorymanage.h
#ifndef _MemoryManage_h_
#define _MemoryManage_h_#include "List.h"//***** PCB 鏈 表 操 作 *****//
Status InsertProcess(LinkList Q,PCBType e);
Status DeleteProsess(LinkList Q,int i,PCBType *e);
//***** 分 區 表 操 作 *****//
//插入分區表元素
Status InsertTable_f(SqList_f *L, int i, PartiType e);
//刪除分區表元素
Status DeleteTable_f(SqList_f *L, int i, PartiType *e);//****** 頁 表 操 作 ******//
//插入頁表元素
Status InsertTable_y(SqList_y *L, int i, BlockNumType e);
//刪除頁表元素
Status DeleteTable_y(SqList_y *L, int i, BlockNumType *e);
Status LoadPages(PageTable *L, int size);Status MallocMemory(PCB *pe, SqList_f *pPartTable, int *arr);
Status SelectPart(PCB* pPCB, SqList_f *pPartTable,int *arr);
void SearchSpace(PCBList PCBdata, SqList_f *partTable);
void FreeMemory(int *arr, int len, SqList_f *pPartTable);
void InitAllocation(PCBList PCBdata, PartTable *partTable);
void PrintProQueue(LinkList L);
void PrintPartTable(PartTable L);#endif實現
#include "List.h"//******* 鏈表 *******//
Status InitLinkList(LinkList *L)
{*L = (LinkList)malloc(sizeof(LNode));strcpy((*L)->data.Name, "");(*L)->Next = NULL;return OK;
}void PCBAssign(PCBType *e1, PCBType e2)
{strcpy(e1->Name,e2.Name);e1->MemorySize = e2.MemorySize;e1->pPagetable = e2.pPagetable;
}Status GetElemt_L(LinkList L,int i,PCBType *e)
{LinkList p = L->Next; //指向第j個結點int j = 1; //從第一個開始往后找while ( p && j < i ) //p不為空且j < i{p = p->Next;++j;} //p為空,說明鏈表循環結束,也沒有到第i個結點 j==iif (!p || j > i) //因為此處對i 沒有做判斷 如果 i==0 或 負數 條件成立//對于 i == j == 1 的情況則不用循環正好 返回{return ERROR;}*e = p->data; //通過尋址改變了 該地址內存中元素的值return OK;
}
//鏈表中按照優先級:從大到小排序插入
Status ListInsert_L(LinkList L,PCBType e) //這樣修改應該不對 p = *L出錯
{LinkList p = L, s;while (p->Next) p = p->Next;s = (LinkList)malloc(sizeof(LNode));PCBAssign(&s->data, e);s->Next = p->Next;p->Next = s;return OK;
}Status ListDelete_L(LinkList L,int i,PCBType *e)
{LinkList p = L, q;int j = 0;while (p->Next && j < i-1){p = p->Next; ++j;}if(!p->Next || j > i - 1)return ERROR;q = p->Next;p->Next = q->Next;PCBAssign(e, q->data);free(q);return OK;
}//****** 分區使用說明表 ******//
void PartiAssign_f(PartiType *e1, PartiType e2)
{e1->PartStartAddr = e2.PartStartAddr;strcpy(e1->Name, e2.Name);
}Status InitList_f(SqList_f *L)
{//構造一個空的線性表LL->elem = (PartiType *)malloc((LIST_INIT_SIZE)*sizeof(PartiType));if(!L->elem) return ERROR; //存儲分配失敗L->length = 0; //空表長度為0L->listsize = LIST_INIT_SIZE; //初始存儲的容量return OK;
}//在順序線性表L中第i個位置之前插入新的元素e
Status ListInsert_f(SqList_f *L,int i,PartiType e)
{//在順序線性表L中第i個位置之前插入新的元素e//i的合法值為1 <= i <= ListLength_Sq(L)+1PartiType *q, *p, *newbase;if(i < 1 || i > L->length + 1 ) return ERROR; //i值不合法if(L->length >= L->listsize){ //當前存儲空間已滿,增加分配newbase = (PartiType *)realloc(L->elem,(L->listsize + LISTINCREMENT)*sizeof(PartiType));if(!newbase) return ERROR; //存儲分配失敗L->elem = newbase; //新基址L->listsize += LISTINCREMENT; //增加存儲容量} q = &(L->elem[i - 1]); //q為插入位置for(p = &(L->elem[L->length-1]);p >= q; --p)PartiAssign_f((p+1),*p); //插入位置及之后的元素右移PartiAssign_f(q ,e); //插入eL->length++;return OK;
}//在順序線性表L中刪除第i個元素,并用e返回其值
Status ListDelete_f(SqList_f *L,int i,PartiType *e)
{//在順序線性表L中刪除第i個元素,并用e返回其值//i的合法值為1 <= i <= ListLength_Sq(L)PartiType *p,*q;if((i < 1) || (i > L->length)) return ERROR; //i值不合法p = &(L->elem[i-1]); //p為被刪除元素的位置PartiAssign_f(e, *p); //將被刪除元素的值賦給e (待定)q = L->elem + L->length-1; //移動到表尾元素的位置for (++p;p<=q;++p)PartiAssign_f((p-1), *p); //被刪除元素之后的元素左移L->length--;return OK;
}//****** 頁表 ******//void PartiAssign_y(BlockNumType *e1, BlockNumType e2)
{(*e1).BlockNum = e2.BlockNum;(*e1).DistbutSt = e2.DistbutSt;
}Status InitList_y(SqList_y **L)
{//構造一個空的線性表L(*L) = (PageTable *)malloc(sizeof(PageTable));//不可缺少(*L)->elem = (BlockNumType *)malloc((LIST_INIT_SIZE)*sizeof(BlockNumType));if(!(*L)->elem) return ERROR; //存儲分配失敗(*L)->length = 0; //空表長度為0(*L)->listsize = LIST_INIT_SIZE; //初始存儲的容量return OK;
}//在順序線性表L中第i個位置之前插入新的元素e
Status ListInsert_y(SqList_y *L,int i,BlockNumType e)
{//在順序線性表L中第i個位置之前插入新的元素e//i的合法值為1 <= i <= ListLength_Sq(L)+1BlockNumType *q, *p, *newbase;if(i < 1 || i > L->length + 1 ) return ERROR; //i值不合法if(L->length >= L->listsize){ //當前存儲空間已滿,增加分配newbase = (BlockNumType *)realloc(L->elem,(L->listsize + LISTINCREMENT)*sizeof(BlockNumType));if(!newbase) return ERROR; //存儲分配失敗L->elem = newbase; //新基址L->listsize += LISTINCREMENT; //增加存儲容量} q = &(L->elem[i - 1]); //q為插入位置for(p = &(L->elem[L->length-1]);p >= q; --p)PartiAssign_y((p+1),*p); //插入位置及之后的元素右移PartiAssign_y(q ,e); //插入eL->length++;return OK;
}//在順序線性表L中刪除第i個元素,并用e返回其值
Status ListDelete_y(SqList_y *L,int i,BlockNumType *e)
{//在順序線性表L中刪除第i個元素,并用e返回其值//i的合法值為1 <= i <= ListLength_Sq(L)BlockNumType *p,*q;if((i < 1) || (i > L->length)) return ERROR; //i值不合法p = &(L->elem[i-1]); //p為被刪除元素的位置PartiAssign_y(e, *p); //將被刪除元素的值賦給e (待定)q = L->elem + L->length-1; //移動到表尾元素的位置for (++p;p<=q;++p)PartiAssign_y((p-1), *p); //被刪除元素之后的元素左移L->length--;return OK;
}memorymanage.c
#include "MemoryManage.h"//***** PCB鏈表操作 *****//
Status InsertProcess(LinkList Q,PCBType e)
{return ListInsert_L(Q, e);
}Status DeleteProsess(LinkList Q,int i,PCBType *e)
{return ListDelete_L(Q ,i,e);
}//***** 分區表操作 *****//
Status InsertTable_f(SqList_f *L, int i, PartiType e)
{return ListInsert_f(L,i, e);
}Status DeleteTable_f(SqList_f *L, int i, PartiType *e)
{return ListDelete_f(L, i, e);
}//***** 頁表操作 *****//
Status InsertTable_y(SqList_y *L, int i, BlockNumType e)
{return ListInsert_y(L,i, e);
}Status DeleteTable_y(SqList_y *L, int i, BlockNumType *e)
{return ListDelete_y(L, i, e);
}Status LoadPages(PageTable *L, int size)
{int i, pageNum = ceil( size * 1.0 / PageSize) ;PageData e = {-1, Unallocated};for (i = 0; i < pageNum; i++){if(!InsertTable_y(L, L->length + 1, e))return ERROR;}return OK;;
}//若返回0,則代表錯誤
Status SelectPart(PCB* pPCB, SqList_f *pPartTable,int *arr)
{/ 以下補充 /int i = 0, j = 0;while(i < pPCB->pPagetable->length && j < pPartTable->length){if(pPCB->pPagetable->elem[i].DistbutSt == Unallocated){if(!strcmp(pPartTable->elem[j].Name, "")){arr[i] = j;++i;++j;} else {++j;}} else {++i;}}if(i == pPCB->pPagetable->length){return OK;}return ERROR;
}Status MallocMemory(PCB *pe, SqList_f *pPartTable, int *arr)
{int i, pageNum ;以下補充 /for(i = 0; i < pe->pPagetable->length; ++i){if(pe->pPagetable->elem[i].DistbutSt == Unallocated){pe->pPagetable->elem[i].BlockNum = arr[i];pe->pPagetable->elem[i].DistbutSt = Allocated;strcpy(pPartTable->elem[arr[i]].Name, pe->Name);}}return ERROR;
}void InitAllocation(PCBList PCBdata, PartTable *pPartTable)
{LNode *p;int pos, arr[20] = {0};p = PCBdata->Next;while (p){if(p->data.pPagetable->elem[0].DistbutSt == Unallocated){if(SelectPart(&(p->data), pPartTable, arr)){MallocMemory(&(p->data), pPartTable, arr);}}p = p->Next;}
}//該釋放進程只在結束進程時用到,因此不用管進程信息
void FreeMemory(int *arr, int len, SqList_f *pPartTable)
{int i;以下補充 /for(i = 0; i < len; ++i){strcpy(pPartTable->elem[arr[i]].Name, "");}
}void SearchSpace(PCBList PCBdata, SqList_f *partTable)
{int pos, arr[20] = {0};LNode *p;p = PCBdata->Next;while (p){if(p->data.pPagetable->elem[0].DistbutSt == Unallocated){if(SelectPart(&(p->data), partTable, arr)){MallocMemory(&(p->data), partTable, arr);}}p = p->Next;}}void PrintProQueue(LinkList L)
{int i = 0;L = L->Next;while(L){printf(" -----------------------------\n");printf("|進程名 | 申請大小 |\n");printf("| %s | %4d |\n", L->data.Name, L->data.MemorySize);printf("%s頁表信息如下:\n| 頁號 | 塊號 | 是否分配 |\n", L->data.Name);for (i = 0; i < L->data.pPagetable->length; i++)printf("| %4d | %4d | %4s |\n", i , L->data.pPagetable->elem[i].BlockNum,L->data.pPagetable->elem[i].DistbutSt == Allocated? "是" : "否");L = L->Next;}printf(" ----------------------------------------\n");
}void PrintPartTable(PartTable L)
{int i = 0, j = 0;printf(" ----------------------------------------\n");printf("|分區號 | 起始位置 | 分區大小 | 是否分配 |\n");for (i = 0; i < L.length; ++i)printf("| %2d | %4d | %4d | %4s |\n",i , L.elem[i].PartStartAddr, PageSize , strcmp(L.elem[i].Name, "") ? L.elem[i].Name :"否");printf(" ----------------------------------------\n");
}main
#include "MemoryManage.h"/* 實驗08 基本分頁 */void InputPCBData(PCBList * pPCBdata)
{PCBType e = {{0}, 0, NULL};strcpy(e.Name,"P1");e.MemorySize = 16;InitList_y(&(e.pPagetable));LoadPages(e.pPagetable, e.MemorySize);InsertProcess(*pPCBdata,e);strcpy(e.Name,"P2");e.MemorySize = 32;InitList_y(&(e.pPagetable));LoadPages(e.pPagetable, e.MemorySize);InsertProcess(*pPCBdata,e);strcpy(e.Name,"P3");e.MemorySize = 48;InitList_y(&(e.pPagetable));LoadPages(e.pPagetable, e.MemorySize);InsertProcess(*pPCBdata,e);strcpy(e.Name,"P4");e.MemorySize = 96;InitList_y(&(e.pPagetable));LoadPages(e.pPagetable, e.MemorySize);InsertProcess(*pPCBdata,e);strcpy(e.Name,"P5");e.MemorySize = 100;InitList_y(&(e.pPagetable));LoadPages(e.pPagetable, e.MemorySize);InsertProcess(*pPCBdata,e);
}void SettingPage(PartTable * pPartdata)
{PartiType se = {0, {0}};int Num = (512 - 16) / PageSize , i;for (i = 0; i < Num; ++i){se.PartStartAddr = 16 + i * PageSize;InsertTable_f(pPartdata, i + 1, se);}
}
//0 - 15Kb 操作系統占用 總大小512KB
int main(void)
{PCBList PCBdata; //PCBdata里面存放原始PCB數據PartTable partTable; //分區表char PcbName[NAME_MAXSIZE] = {0}, choice;PCBType PCBe = {{0}, 0, NULL};PartiType Parte = {0, 0};PCBType *pcb = NULL;LNode *p; int i, size, pos, arr[20] = {0}, k = 0;InitList_f(&partTable);SettingPage(&partTable);InitLinkList(&PCBdata);InputPCBData(&PCBdata);InitAllocation(PCBdata, &partTable);PrintProQueue(PCBdata);PrintPartTable(partTable);while(true){system("cls");PrintProQueue(PCBdata);PrintPartTable(partTable);printf(" ================================================\n");printf("| 1.結 束 進 程 |\n");printf("| 2.添 加 進 程 |\n");printf("| 3.退 出 系 統 |\n");printf(" ================================================\n");printf("請選擇:");fflush(stdin);scanf("%c",&choice);switch (choice){case '1':printf("要結束的進程名:");scanf("%s",PcbName);for (p = PCBdata->Next, i = 1; p && strcmp(PcbName, p->data.Name); i++, p = p->Next);if(!p){printf("進程名輸入錯誤!\n");break;}DeleteProsess(PCBdata, i, &PCBe);k = 0;for(i = 0; i < partTable.length; i++){if(!strcmp(PcbName, partTable.elem[i].Name)){arr[k++] = i;}}FreeMemory(arr, k, &partTable);SearchSpace(PCBdata, &partTable);break;case '2':printf("請輸入添加的進程名,進程所占內存大小:");scanf("%s%d",PcbName , &size);strcpy(PCBe.Name, PcbName);PCBe.MemorySize = size;InitList_y(&(PCBe.pPagetable));LoadPages(PCBe.pPagetable, PCBe.MemorySize);if(SelectPart(&(PCBe), &partTable, arr))MallocMemory(&(PCBe), &partTable, arr);InsertProcess(PCBdata, PCBe);break;case '3':return 0;default:printf("選擇項輸入錯誤,重新選擇!\n");break;}PrintProQueue(PCBdata);PrintPartTable(partTable);system("pause");}return 0;
}?
五、模擬動態分區分配
介紹
list.h
#ifndef _List_h_
#define _List_h_#include "Data.h"//******* 鏈表 *******//
Status InitLinkList(LinkList *L);
void PCBAssign(PCBType *e1, PCBType e2);
Status GetElemt_L(LinkList L,int i,PCBType *e);
Status ListInsert_L(LinkList L,PCBType e);
Status ListDelete_L(LinkList L,int i,PCBType *e);//****** 動態順序表 ******//
void PartiAssign(PartiType *e1, PartiType e2);
Status InitList_Sq(SqList *L);
Status ListInsert_Sq(SqList *L,int i,PartiType e);
Status ListDelete_Sq(SqList *L,int i,PartiType *e);#endifMemoryManage.h
#ifndef _MemoryManage_h_
#define _MemoryManage_h_#include "List.h"//***** PCB鏈表操作 *****//
Status InsertProcess(LinkList Q,PCBType e);
Status DeleteProsess(LinkList Q,int i,PCBType *e);
//***** 分區表操作 *****//
Status InsertTable(SqList *L, int i, PartiType e);
Status DeleteTable(SqList *L, int i, PartiType *e);
int SelectPart(PCB* pPCB, SqList *pPartTable, AllocatStrategy AS);
int MallocMemory(PCB *pe, SqList *pPartTable,int i);
void SearchSpace(PCBList PCBdata, SqList *partTable, AllocatStrategy AS);
void FreeMemory(int pos, SqList *pPartTable);
void InitAllocation(PCBList PCBdata, PartTable *partTable, AllocatStrategy AS);
void PrintProQueue(LinkList L);
void PrintPartTable(PartTable L);#endif實現
list.c
#include "List.h"Status InitLinkList(LinkList *L)
{*L = (LinkList)malloc(sizeof(LNode));strcpy((*L)->data.Name, "");(*L)->Next = NULL;return OK;
}void PCBAssign(PCBType *e1, PCBType e2)
{strcpy(e1->Name,e2.Name);e1->DistbutSt = e2.DistbutSt;e1->MemorySize = e2.MemorySize;e1->StartAddress = e2.StartAddress;
}Status GetElemt_L(LinkList L,int i,PCBType *e)
{LinkList p = L->Next; //指向第j個結點int j = 1; //從第一個開始往后找while ( p && j < i ) //p不為空且j < i{p = p->Next;++j;} //p為空,說明鏈表循環結束,也沒有到第i個結點 j==iif (!p || j > i) //因為此處對i 沒有做判斷 如果 i==0 或 負數 條件成立//對于 i == j == 1 的情況則不用循環正好 返回{return ERROR;}*e = p->data; //通過尋址改變了 該地址內存中元素的值return OK;
}
//鏈表中按照優先級:從大到小排序插入
Status ListInsert_L(LinkList L,PCBType e) //這樣修改應該不對 p = *L出錯
{LinkList p = L, s;while (p->Next) p = p->Next;s = (LinkList)malloc(sizeof(LNode));PCBAssign(&s->data, e);s->Next = p->Next;p->Next = s;return OK;
}
//鏈表中頭部刪除
Status ListDelete_L(LinkList L,int i,PCBType *e)
{LinkList p = L, q;int j = 0;while (p->Next && j < i-1){p = p->Next; ++j;}if(!p->Next || j > i - 1)return ERROR;q = p->Next;p->Next = q->Next;PCBAssign(e, q->data);free(q);return OK;
}// 初始化 ///
void PartiAssign(PartiType *e1, PartiType e2)
{e1->PartitionSize = e2.PartitionSize;e1->PartStartAddr = e2.PartStartAddr;strcpy(e1->Name, e2.Name);
}Status InitList_Sq(SqList *L)
{//構造一個空的線性表LL->elem = (PartiType *)malloc((LIST_INIT_SIZE)*sizeof(PartiType));if(!L->elem) return ERROR; //存儲分配失敗L->length = 0; //空表長度為0L->listsize = LIST_INIT_SIZE; //初始存儲的容量return OK;
}//在順序線性表L中第i個位置之前插入新的元素e
Status ListInsert_Sq(SqList *L,int i,PartiType e)
{//在順序線性表L中第i個位置之前插入新的元素e//i的合法值為1 <= i <= ListLength_Sq(L)+1PartiType *q, *p, *newbase;if(i < 1 || i > L->length + 1 ) return ERROR; //i值不合法if(L->length >= L->listsize){ //當前存儲空間已滿,增加分配newbase = (PartiType *)realloc(L->elem,(L->listsize + LISTINCREMENT)*sizeof(PartiType));if(!newbase) return ERROR; //存儲分配失敗L->elem = newbase; //新基址L->listsize += LISTINCREMENT; //增加存儲容量} q = &(L->elem[i - 1]); //q為插入位置for(p = &(L->elem[L->length-1]);p >= q; --p)PartiAssign((p+1),*p); //插入位置及之后的元素右移PartiAssign(q ,e); //插入eL->length++;return OK;
}//在順序線性表L中刪除第i個元素,并用e返回其值
Status ListDelete_Sq(SqList *L,int i,PartiType *e)
{//在順序線性表L中刪除第i個元素,并用e返回其值//i的合法值為1 <= i <= ListLength_Sq(L)PartiType *p,*q;if((i < 1) || (i > L->length)) return ERROR; //i值不合法p = &(L->elem[i-1]); //p為被刪除元素的位置PartiAssign(e, *p); //將被刪除元素的值賦給e (待定)q = L->elem + L->length-1; //移動到表尾元素的位置for (++p;p<=q;++p)PartiAssign((p-1), *p); //被刪除元素之后的元素左移L->length--;return OK;
}?
#include "MemoryManage.h"
extern int CF_i;//***** PCB鏈表操作 *****//
Status InsertProcess(LinkList Q,PCBType e)
{return ListInsert_L(Q, e);
}Status DeleteProsess(LinkList Q,int i,PCBType *e)
{return ListDelete_L(Q ,i,e);
}//***** 分區表操作 *****//
Status InsertTable(SqList *L, int i, PartiType e)
{return ListInsert_Sq(L,i, e);
}Status DeleteTable(SqList *L, int i, PartiType *e)
{return ListDelete_Sq(L, i, e);
}//返回第幾個內存塊,從1開始,若返回0,則代表錯誤
int SelectPart(PCB* pPCB, SqList *pPartTable,AllocatStrategy AS)
{int i;int BestArr[20] = {0}, k = 0, min = 500, min_i = -1;if(AS == FirstPriority){for (i = 0; i < pPartTable->length; ++i)if(!strcmp(pPartTable->elem[i].Name, "") && pPartTable->elem[i].PartitionSize >= pPCB->MemorySize)return i + 1;}else if(AS == BestAdapt){以下補充 /for(i = 0; i < pPartTable->length; ++i){if(!strcmp(pPartTable->elem[i].Name, "") && pPartTable->elem[i].PartitionSize >= pPCB->MemorySize)if(pPartTable->elem[i].PartitionSize - pPCB->MemorySize < min){min = pPartTable->elem[i].PartitionSize - pPCB->MemorySize;min_i = i;}}return min_i+1;}else if(AS == CycleFirst){int flag = 0;以下補充 /for(i = CF_i; i < pPartTable->length; i = (i+1)%(pPartTable->length)){if(!strcmp(pPartTable->elem[i].Name, "") && pPartTable->elem[i].PartitionSize >= pPCB->MemorySize){CF_i = (i+1)%pPartTable->length;return i + 1;}if(flag && i == CF_i){break;}if(i == CF_i){flag = 1;}}return 0;}else{printf("算法選擇有誤!\n");}return ERROR;
}//通過SelectPart查找是否存在可以分配的分區,在main函數中進行調用本方法進行內存的分配
int MallocMemory(PCB *pe, SqList *pPartTable,int i)
{PartiType se = {0, 0, {0}};以下補充 ///修改PCBpe->DistbutSt = Allocated;pe->StartAddress = pPartTable->elem[i].PartStartAddr;if(pPartTable->elem[i].PartitionSize == pe->MemorySize){strcpy(pPartTable->elem[i].Name, pe->Name);} else {//修改分區使用說明表strcpy(pPartTable->elem[i].Name, "");pPartTable->elem[i].PartitionSize -= pe->MemorySize;pPartTable->elem[i].PartStartAddr += pe->MemorySize;//新建一個表目, 并插入分區表使用說明表strcpy(se.Name, pe->Name);se.PartitionSize = pe->MemorySize;se.PartStartAddr = pe->StartAddress;InsertTable(pPartTable, i+1, se);}return OK;
}void InitAllocation(PCBList PCBdata, PartTable *pPartTable,AllocatStrategy AS)
{LNode *p;int pos;p = PCBdata->Next;while (p){if(p->data.DistbutSt == Unallocated){pos = SelectPart(&(p->data), pPartTable, AS);//從1開始if(pos){MallocMemory( &(p->data), pPartTable, pos - 1);}}p = p->Next;}
}//回收指定位置的內存空間
void FreeMemory(int pos, SqList *pPartTable)//沒考慮 pos為0情況,沒考慮刪除后修改起始地址情況
{PartiType se = {0, 0, {0}};int flag = 0;以下補充 /if(pos != pPartTable->length-1){//為后一塊分配if(!strcmp(pPartTable->elem[pos+1].Name, "")){strcpy(pPartTable->elem[pos].Name, "");pPartTable->elem[pos].PartitionSize += pPartTable->elem[pos+1].PartitionSize;strcpy(se.Name, pPartTable->elem[pos+1].Name);se.PartitionSize = pPartTable->elem[pos+1].PartitionSize;se.PartStartAddr = pPartTable->elem[pos+1].PartStartAddr;DeleteTable(pPartTable, pos+1, &se);flag = 1;}}if(pos != 0){//為前一塊分配if(!strcmp(pPartTable->elem[pos-1].Name, "")){strcpy(pPartTable->elem[pos-1].Name, "");pPartTable->elem[pos-1].PartitionSize += pPartTable->elem[pos].PartitionSize;strcpy(se.Name, pPartTable->elem[pos-1].Name);se.PartitionSize = pPartTable->elem[pos-1].PartitionSize;se.PartStartAddr = pPartTable->elem[pos-1].PartStartAddr;DeleteTable(pPartTable, pos-1, &se);flag = 1;}}if(!flag){strcpy(pPartTable->elem[pos].Name, "");}
}void SearchSpace(PCBList PCBdata, SqList *partTable, AllocatStrategy AS)
{int pos;LNode *p;p = PCBdata->Next;while (p){if(p->data.DistbutSt == Unallocated){pos = SelectPart(&(p->data), partTable, AS);//從1開始if(pos){MallocMemory(&(p->data), partTable, pos - 1);}}p = p->Next;}}void PrintProQueue(LinkList L)
{int i = 0;L = L->Next;printf(" ----------------------------------------\n");printf("|進程名 | 起始位置 | 申請大小 | 是否分配 |\n");while(L){printf("| %s | %4d | %4d | %4s |\n",L->data.Name, L->data.StartAddress, L->data.MemorySize, L->data.DistbutSt == Allocated? "是" : "否");L = L->Next;}printf(" ----------------------------------------\n");
}void PrintPartTable(PartTable L)
{int i = 0, j = 0;printf(" ----------------------------------------\n");printf("|分區號 | 起始位置 | 分區大小 | 是否分配 |\n");for (i = 0; i < L.length; ++i)printf("| %2d | %4d | %4d | %4s |\n",i + 1 , L.elem[i].PartStartAddr, L.elem[i].PartitionSize , strcmp(L.elem[i].Name, "") ? L.elem[i].Name :"否");printf(" ----------------------------------------\n");
}main
#include "MemoryManage.h"/*實驗06 動態分區分配
*/int CF_i;void InputPCBData(PCBList * pPCBdata)
{PCBType e = {{0}, 0, 0, Unallocated};strcpy(e.Name,"P1");e.MemorySize = 16;InsertProcess(*pPCBdata,e);strcpy(e.Name,"P2");e.MemorySize = 32;InsertProcess(*pPCBdata,e);strcpy(e.Name,"P3");e.MemorySize = 48;InsertProcess(*pPCBdata,e);strcpy(e.Name,"P4");e.MemorySize = 96;InsertProcess(*pPCBdata,e);strcpy(e.Name,"P5");e.MemorySize = 100;InsertProcess(*pPCBdata,e);
}void SetFixedZone(PartTable * pPartdata)
{PartiType se = {0, 0, {0}};se.PartStartAddr = 16;se.PartitionSize = 512 - 16;strcpy(se.Name, "");InsertTable(pPartdata, 1, se);
}
//0 - 15Kb 操作系統占用 總大小512KB
int main(void)
{PCBList PCBdata; //PCBdata里面存放原始PCB數據PartTable partTable; //分區表char PcbName[NAME_MAXSIZE] = {0}, choice;PCBType PCBe = {{0}, 0, 0, Unallocated};PartiType Parte = {0, 0};PCBType *pcb = NULL;LNode *p; AllocatStrategy AS = CycleFirst; //FirstPriority, BestAdapt, CycleFirst//AllocatStrategy AS = BestAdapt;int i, size, pos;//分區表InitList_Sq(&partTable);SetFixedZone(&partTable);//進程表InitLinkList(&PCBdata);InputPCBData(&PCBdata);//初始化InitAllocation(PCBdata, &partTable, AS);CF_i = 0;PrintProQueue(PCBdata);PrintPartTable(partTable);while(true){system("cls");PrintProQueue(PCBdata);PrintPartTable(partTable);printf(" ================================================\n");printf("| 1.結 束 進 程 |\n");printf("| 2.添 加 進 程 |\n");printf("| 3.退 出 系 統 |\n");printf(" ================================================\n");printf("請選擇:");fflush(stdin);scanf("%c",&choice);switch (choice){case '1':printf("要結束的進程名:");scanf("%s",PcbName);for (p = PCBdata->Next, i = 1; p && strcmp(PcbName, p->data.Name); i++, p = p->Next);if(!p){printf("進程名輸入錯誤!\n");break;}DeleteProsess(PCBdata, i, &PCBe);for(i = 0; i < partTable.length; i++){if(!strcmp(PcbName, partTable.elem[i].Name)){FreeMemory(i ,&partTable);break;}}SearchSpace( PCBdata, &partTable, AS);break;case '2':printf("請輸入添加的進程名,進程所占內存大小:");scanf("%s%d",PcbName , &size);PCBe.DistbutSt = Unallocated;PCBe.StartAddress = 0;strcpy(PCBe.Name, PcbName);PCBe.MemorySize = size;pos = SelectPart(&(PCBe), &partTable, AS);//從1開始if(pos)MallocMemory(&(PCBe), &partTable, pos - 1);InsertProcess(PCBdata, PCBe);break;case '3':return 0;default:printf("選擇項輸入錯誤,重新選擇!\n");break;}PrintProQueue(PCBdata);PrintPartTable(partTable);system("pause");}return 0;
}?
方法、cut()函數、get_dummies()函數】)

方法)

方法)

方法、apply()方法】)












