?在七月算法報的班,老師講的蠻好。好記性不如爛筆頭,關鍵內容還是記錄一下吧,課程入口,感興趣的同學可以學習一下。
-------------------------------------------------------------------------------------------------------------------------------
特征匹配之后,得到了特征點之間的對應關系。根據圖像數據的特征,估計位姿變換的方法有以下三大類。
? 如果只有兩個單目圖像,得到 2D-2D 間的關系 ----對極幾何
? 如果匹配的是幀和地圖,得到 3D-2D 間的關系 ----PnP
? 如果匹配的是 RGB-D圖,得到 3D-3D 間的關系 ----ICP
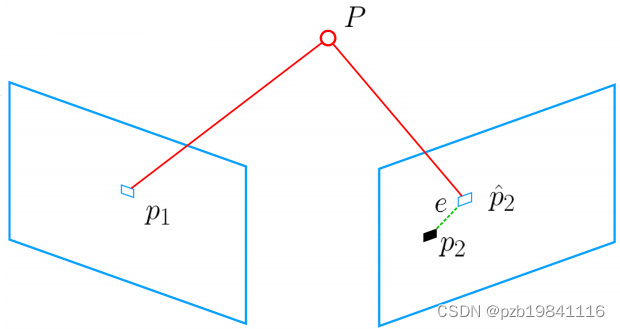
對極幾何的示意圖

其中,P為三維空間中的一個路標,P在圖像𝐼1與𝐼2的投影: 𝑝1, 𝑝2;相機1到相機2的變換: 𝑇12;𝑂1𝑃,𝑂2𝑃在對方圖像上的投影: 𝑒2𝑝2(𝑙2),𝑒1𝑝1(𝑙1);𝑂1𝑂2與兩個圖像的交點: 𝑒1, 𝑒2
以下是對極幾何中幾個名詞術語的定義。
Epipolar Line: 𝑙1, 𝑙2; ----極線
Baseline: 𝑂1𝑂2; ----基線
Epipoles: 𝑒1𝑒2; ----極點
Epipolar Plane: 𝑂1𝑂2𝑃 ----極平面
P在兩個平面上的投影關系如下


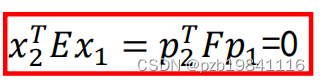
對極約束刻畫了O1 O2共面的關系:

兩步計算位姿:
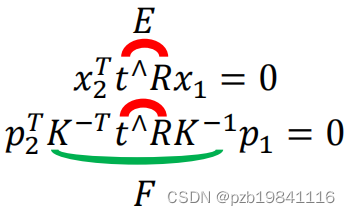
1) 由匹配點計算𝐸或𝐹;
2) 由𝐸或𝐹恢復𝑅,𝑡;
本質矩陣:
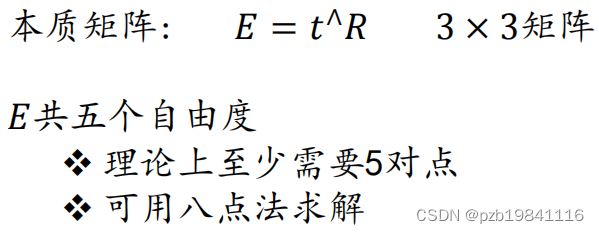
八點法的數學公式:

通過奇異值分解,計算可得四個解,只有第一種是真正的解。

八點法的缺點:
? 純旋轉問題:𝑡 = 0時無法求解;
? 在特征點共面時會退化。
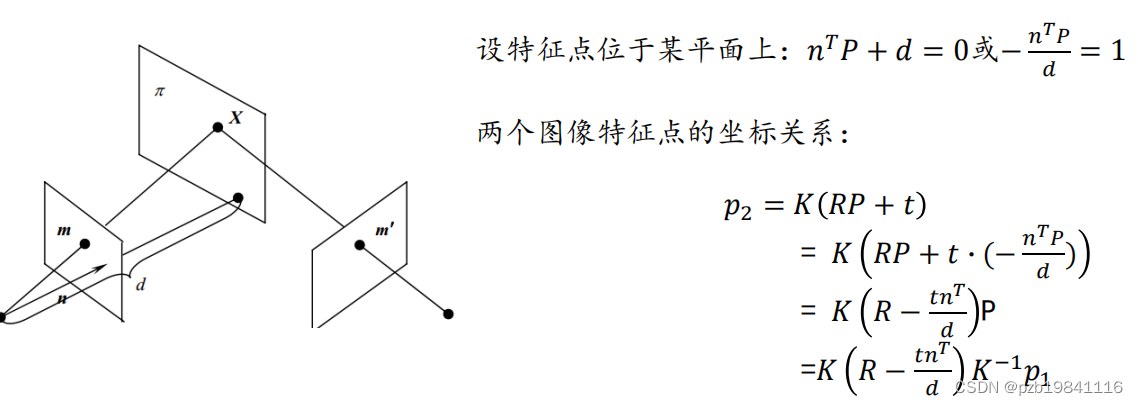
單應矩陣

PnP的作用:已知3D點的空間位置和相機上的投影點,求相機的旋轉和平移(外參)。
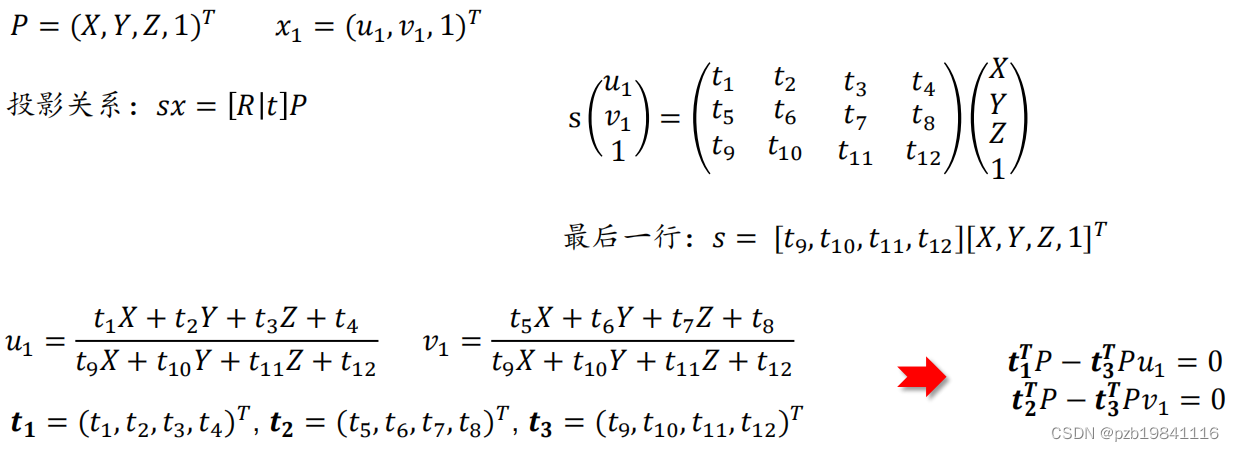
常用的方法包括:Direct Linear Transform、Bundle Adjustment等

Direct Linear Transform的計算過程

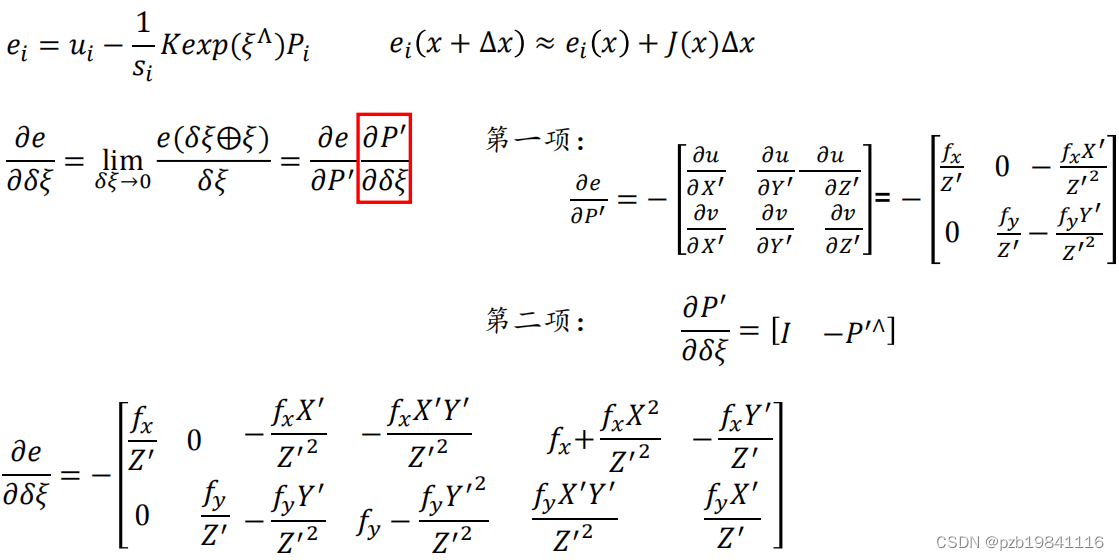
Bundle Adjustment的計算過程


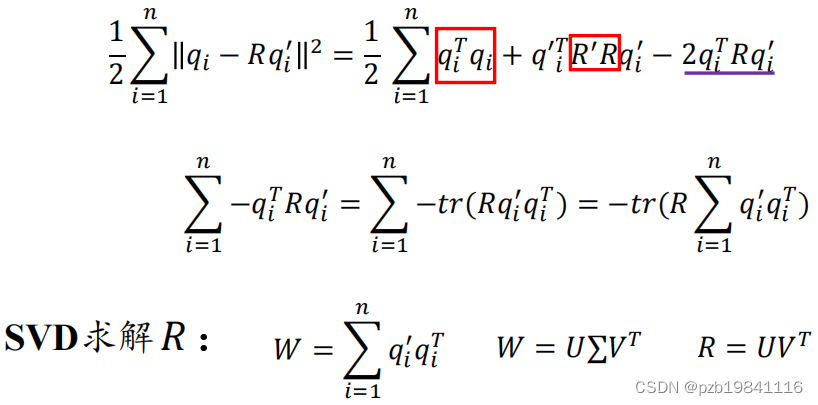
ICP

先求出兩個點云的質心,再做計算的優化
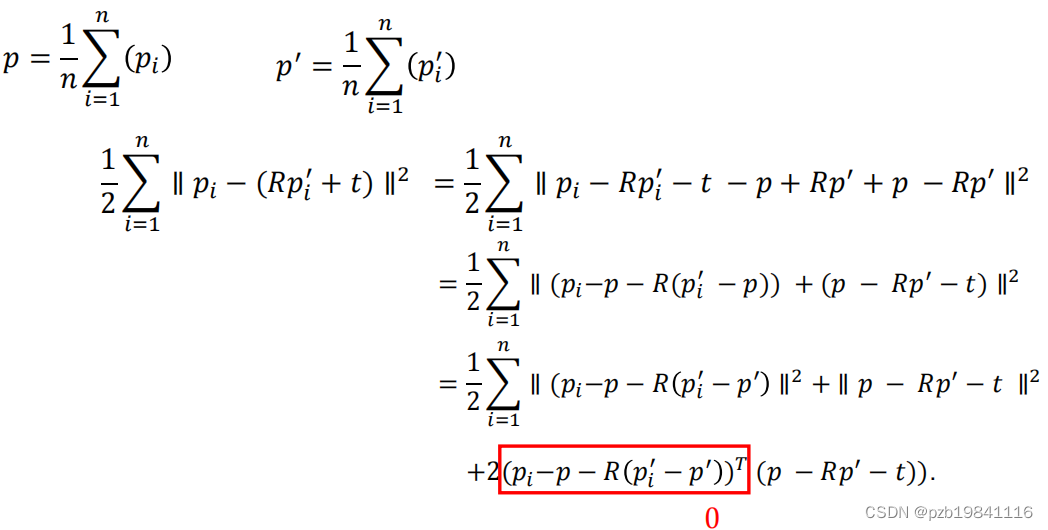
目標公式可以簡化成如下形式

ICP的主要流程簡寫就是如下步驟









實現整頁面截圖或生成PDF文件)
日志分析監控)








)
