文章目錄
- 1 前言
- 2 先上成果
- 3 多目標跟蹤的兩種方法
- 3.1 方法1
- 3.2 方法2
- 4 Tracking By Detecting的跟蹤過程
- 4.1 存在的問題
- 4.2 基于軌跡預測的跟蹤方式
- 5 訓練代碼
- 6 最后
1 前言
🔥 優質競賽項目系列,今天要分享的是
基于深度學習的視頻多目標跟蹤實現
該項目較為新穎,適合作為競賽課題方向,學長非常推薦!
🧿 更多資料, 項目分享:
https://gitee.com/dancheng-senior/postgraduate
2 先上成果

3 多目標跟蹤的兩種方法
3.1 方法1
基于初始化幀的跟蹤,在視頻第一幀中選擇你的目標,之后交給跟蹤算法去實現目標的跟蹤。這種方式基本上只能跟蹤你第一幀選中的目標,如果后續幀中出現了新的物體目標,算法是跟蹤不到的。這種方式的優點是速度相對較快。缺點很明顯,不能跟蹤新出現的目標。
3.2 方法2
基于目標檢測的跟蹤,在視頻每幀中先檢測出來所有感興趣的目標物體,然后將其與前一幀中檢測出來的目標進行關聯來實現跟蹤的效果。這種方式的優點是可以在整個視頻中跟蹤隨時出現的新目標,當然這種方式要求你前提得有一個好的“目標檢測”算法。
學長主要分享Option2的實現原理,也就是Tracking By Detecting的跟蹤方式。
4 Tracking By Detecting的跟蹤過程
**Step1:**使用目標檢測算法將每幀中感興趣的目標檢測出來,得到對應的(位置坐標, 分類, 可信度),假設檢測到的目標數量為M;
**Step2:**通過某種方式將Step1中的檢測結果與上一幀中的檢測目標(假設上一幀檢測目標數量為N)一一關聯起來。換句話說,就是在M*N個Pair中找出最像似的Pair。
對于Step2中的“某種方式”,其實有多種方式可以實現目標的關聯,比如常見的計算兩幀中兩個目標之間的歐幾里得距離(平面兩點之間的直線距離),距離最短就認為是同一個目標,然后通過匈牙利算法找出最匹配的Pair。當讓,你還可以加上其他的判斷條件,比如我用到的IOU,計算兩個目標Box(位置大小方框)的交并比,該值越接近1就代表是同一個目標。還有其他的比如判斷兩個目標的外觀是否相似,這就需要用到一種外觀模型去做比較了,可能耗時更長。
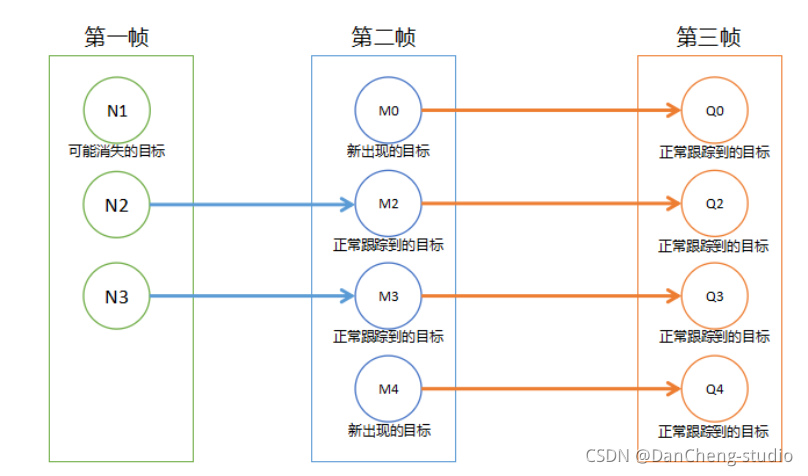
在關聯的過程中,會出現三種情況:
1)在上一幀中的N個目標中找到了本次檢測到的目標,說明正常跟蹤到了;
2)在上一幀中的N個目標中沒有找到本次檢測到的目標,說明這個目標是這一幀中新出現的,所以我們需要把它記錄下來,用于下下一次的跟蹤關聯;
3)在上一幀中存在某個目標,這一幀中并沒有與之關聯的目標,那么說明該目標可能從視野中消失了,我們需要將其移除。(注意這里的可能,因為有可能由于檢測誤差,在這一幀中該目標并沒有被檢測到)
4.1 存在的問題
上面提到的跟蹤方法在正常情況下都能夠很好的工作,但是如果視頻中目標運動得很快,前后兩幀中同一個目標運動的距離很遠,那么這種跟蹤方式就會出現問題。
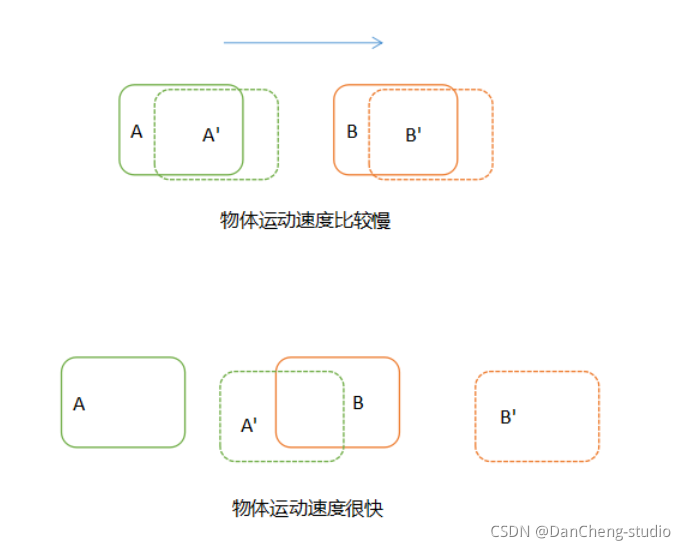
如上圖,實線框表示目標在第一幀的位置,虛線框表示目標在第二幀的位置。當目標運行速度比較慢的時候,通過之前的跟蹤方式可以很準確的關聯(A, A’)和(B,
B’)。但是當目標運行速度很快(或者隔幀檢測)時,在第二幀中,A就會運動到第一幀中B的位置,而B則運動到其他位置。這個時候使用上面的關聯方法就會得到錯誤的結果。
那么怎樣才能更加準確地進行跟蹤呢?
4.2 基于軌跡預測的跟蹤方式
既然通過第二幀的位置與第一幀的位置進行對比關聯會出現誤差,那么我們可以想辦法在對比之前,先預測目標的下一幀會出現的位置,然后與該預測的位置來進行對比關聯。這樣的話,只要預測足夠精確,那么幾乎不會出現前面提到的由于速度太快而存在的誤差

如上圖,我們在對比關聯之前,先預測出A和B在下一幀中的位置,然后再使用實際的檢測位置與預測的位置進行對比關聯,可以完美地解決上面提到的問題。理論上,不管目標速度多么快,都能關聯上。那么問題來了,怎么預測目標在下一幀的位置?
方法有很多,可以使用卡爾曼濾波來根據目標前面幾幀的軌跡來預測它下一幀的位置,還可以使用自己擬合出來的函數來預測下一幀的位置。實際過程中,我是使用擬合函數來預測目標在下一幀中的位置。
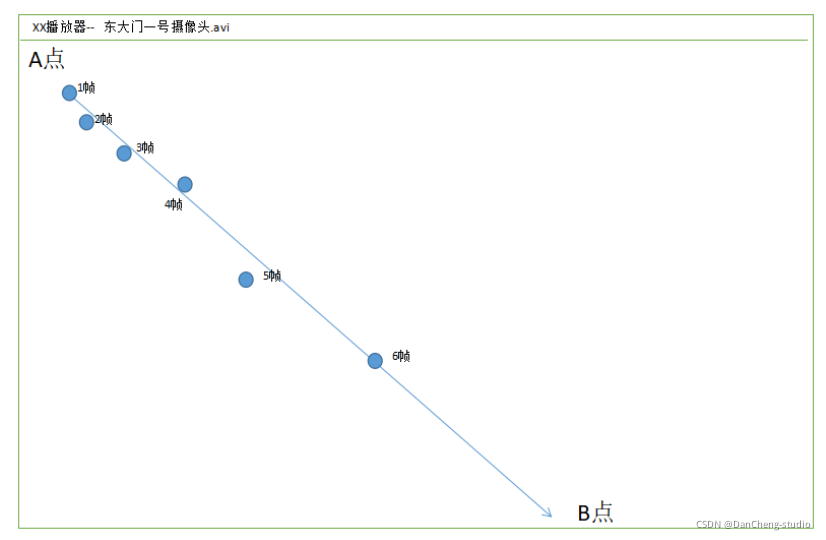
如上圖,通過前面6幀的位置,我可以擬合出來一條(T->XY)的曲線(注意不是圖中的直線),然后預測目標在T+1幀的位置。具體實現很簡單,Python中的numpy庫中有類似功能的方法。
5 訓練代碼
這里記錄一下訓練代碼,來日更新
?
if FLAGS.mode == 'eager_tf':# Eager mode is great for debugging# Non eager graph mode is recommended for real trainingavg_loss = tf.keras.metrics.Mean('loss', dtype=tf.float32)avg_val_loss = tf.keras.metrics.Mean('val_loss', dtype=tf.float32)for epoch in range(1, FLAGS.epochs + 1):for batch, (images, labels) in enumerate(train_dataset):with tf.GradientTape() as tape:outputs = model(images, training=True)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_lossgrads = tape.gradient(total_loss, model.trainable_variables)optimizer.apply_gradients(zip(grads, model.trainable_variables))logging.info("{}_train_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_loss.update_state(total_loss)for batch, (images, labels) in enumerate(val_dataset):outputs = model(images)regularization_loss = tf.reduce_sum(model.losses)pred_loss = []for output, label, loss_fn in zip(outputs, labels, loss):pred_loss.append(loss_fn(label, output))total_loss = tf.reduce_sum(pred_loss) + regularization_losslogging.info("{}_val_{}, {}, {}".format(epoch, batch, total_loss.numpy(),list(map(lambda x: np.sum(x.numpy()), pred_loss))))avg_val_loss.update_state(total_loss)logging.info("{}, train: {}, val: {}".format(epoch,avg_loss.result().numpy(),avg_val_loss.result().numpy()))avg_loss.reset_states()avg_val_loss.reset_states()model.save_weights('checkpoints/yolov3_train_{}.tf'.format(epoch))
6 最后
🧿 更多資料, 項目分享:
https://gitee.com/dancheng-senior/postgraduate
)
















)

