無人機電源模塊的基本運行方式
無人機電壓模塊的核心任務是對動力電源(通常是鋰電池)進行轉換、調節和分配,為飛控、圖傳、攝像頭、舵機等各個子系統提供穩定可靠的電能。其運行方式可以概括為:
電壓轉換與調控:無人機動力電源的輸入電壓通常范圍很寬(例如7.4-50.4V甚至更高),而不同設備需要的工作電壓各異(如3.3V、5V、12V、48V等)。電源模塊需要通過DC-DC轉換器(包括降壓Buck、升壓Boost、升降壓Buck-Boost)進行高效率的電能轉換。例如,高壓電池輸入可能先被轉換為中間總線電壓(如48V),再進一步轉換為各種低壓。
多路輸出與配電管理:現代無人機負載多樣,因此電源模塊常采用多路獨立輸出的設計(如2路5V,2路12V),并為計算單元、射頻模塊等對電源質量要求高的設備提供獨立、低噪聲的供電通道,以減少相互干擾。
智能切換與冗余設計:在一些長航時固定翼無人機中,系統可能會在發電機供電(巡航時)和電池供電(起飛/降落時)之間進行智能切換,以確保在不同飛行階段都能提供最優化的電力支持。
技術要點與核心設計考量
一個優秀的無人機電源模塊設計,需要在以下幾個方面精耕細作:
1.高效率與低熱耗:無人機對重量極其敏感,高效率(通常要求>90%,優秀的模塊可達97%以上)意味著更少的能量浪費和發熱。這不僅延長了續航,也簡化了熱管理設計,允許采用更小、更輕的散熱片甚至自然冷卻。
2.高功率密度與輕量化:在有限的體積和重量限制下,提供盡可能大的功率輸出是關鍵。這需要通過采用高頻開關技術(如ZVS/ZCS軟開關)、高度集成的模塊化設計(如BCM總線轉換器模塊)以及緊湊的布局和熱設計來實現。
3.寬輸入電壓范圍適應能力:無人機電池電壓會隨著放電劇烈波動(如12S鋰電從50.4V降至30V左右)。電源模塊必須在整個輸入范圍內都能穩定高效工作,這對其電路拓撲和控制策略提出了挑戰。
4.優異的電磁兼容性(EMC)與低輸出紋波:無人機上密集的射頻設備(圖傳、數傳、遙控)對電源噪聲非常敏感。低輸出紋波(如<50mV)和良好的EMI抑制能力是保證其他系統正常工作的前提。通常需要采用屏蔽、濾波、合理的布局布線等措施。
5.多重保護機制與高可靠性:
電壓/電流保護:過壓(OVP)、欠壓(UVP)、過流(OCP)、短路(SCP)保護是標準配置,用以保護電源本身和后續負載。
熱保護:過溫保護(OTP)在溫度過高時自動降功或關閉。
浪涌抑制:針對無人機上電機、電調等工作時產生的高壓尖峰浪涌,需要專門的抑制電路(如采用專用浪涌抑制電路,而非普通TVS管)。
技術難點與挑戰
設計無人機電源模塊時,工程師們常常需要攻克以下難關:
效率、體積與熱管理的平衡:追求高效率和高功率密度往往意味著更復雜的電路和更高的元件密度,這又可能帶來散熱挑戰。如何在三者之間取得最佳平衡,是永恒的主題。
寬輸入范圍下的性能一致性:確保在輸入電壓的最高點和最低點,系統都能保持穩定的輸出電壓、高效率和良好的動態響應,這對反饋環路設計和元件選型要求很高。
惡劣環境的適應性:無人機可能工作在高低溫、高濕度、振動沖擊等惡劣環境。電源模塊需要采用工業級或軍用級元件、特殊的封裝和防護工藝(如三防漆、灌封)來保證可靠性。
浪涌與噪聲抑制:無人機動力系統產生的高頻大能量浪涌是模塊的“隱形殺手”,其抑制設計遠比普通電源復雜。同時,開關電源自身的開關噪聲如何不影響敏感的飛控和射頻系統,也是一個需要精心設計和測試的難題。
輕量化與可靠性的矛盾:減輕重量有時意味著減少散熱材料、使用更小封裝的元件(可能散熱和功率余量更低),這可能會對長期可靠性構成挑戰。
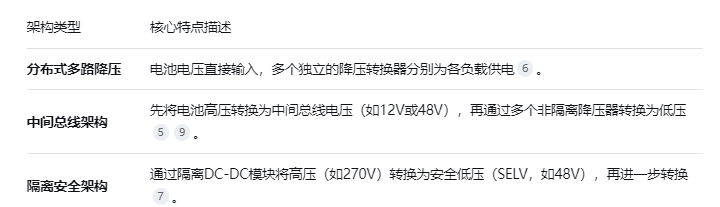
無人機常見電源架構與特點
選型與設計建議
明確需求,權衡取舍:首先明確你的輸入電壓范圍、各通道輸出電壓、電流需求、體積重量限制以及成本預算。沒有“最好”的方案,只有“最合適”的方案。
優先選擇高效率模塊:在預算允許內,選擇效率更高的模塊。它帶來的續航提升和熱管理簡化,其價值往往遠超其成本差異。
重視保護功能和可靠性:仔細查驗產品的保護功能(OVP/OCP/OTP等)是否齊全,以及是否通過相關可靠性測試(如振動、高低溫試驗)。
關注EMC和紋波指標:如果你搭載了高清圖傳、RTK等敏感設備,低紋波和良好的EMC性能至關重要。查看產品的測試數據或報告。
考慮環境適應性:如果你的無人機需要在特殊環境(如低溫、高海拔)下工作,需要特別關注電源模塊在相應條件下的性能表現和啟機特性。

與LSTM(長短期記憶網絡)的組合預測方法)





)


采用量子相位估計(QPE)方法,增強量子神經網絡訓練)




-緩存菜品和緩存套餐功能-記錄實戰教程、問題的解決方法以及完整代碼)




