1、自駕Camera開發的方案是否歸一化
對于OEM,或者自駕方案商如Mobileye
如果進行Camera的開發,一般建議采用Tesla的系統化最優方案,所有Camera統一某個或者某兩個MP設計(增加CIS議價權,減少Camera PCBA的設計維護數量),后續搭配不同的鏡頭得到不同應用的Camera。
對于Tier1,如Aptiv
Tier1在不同的OEM中,拿到的定點Camera需求都是不同的,也無法在同一家OEM,將所有的Camera定點都能拿到,所以Tier1采用的是Pixel與Camera應用功能結合,以達到單功能的Camera成本最優化設計。
如下表所示
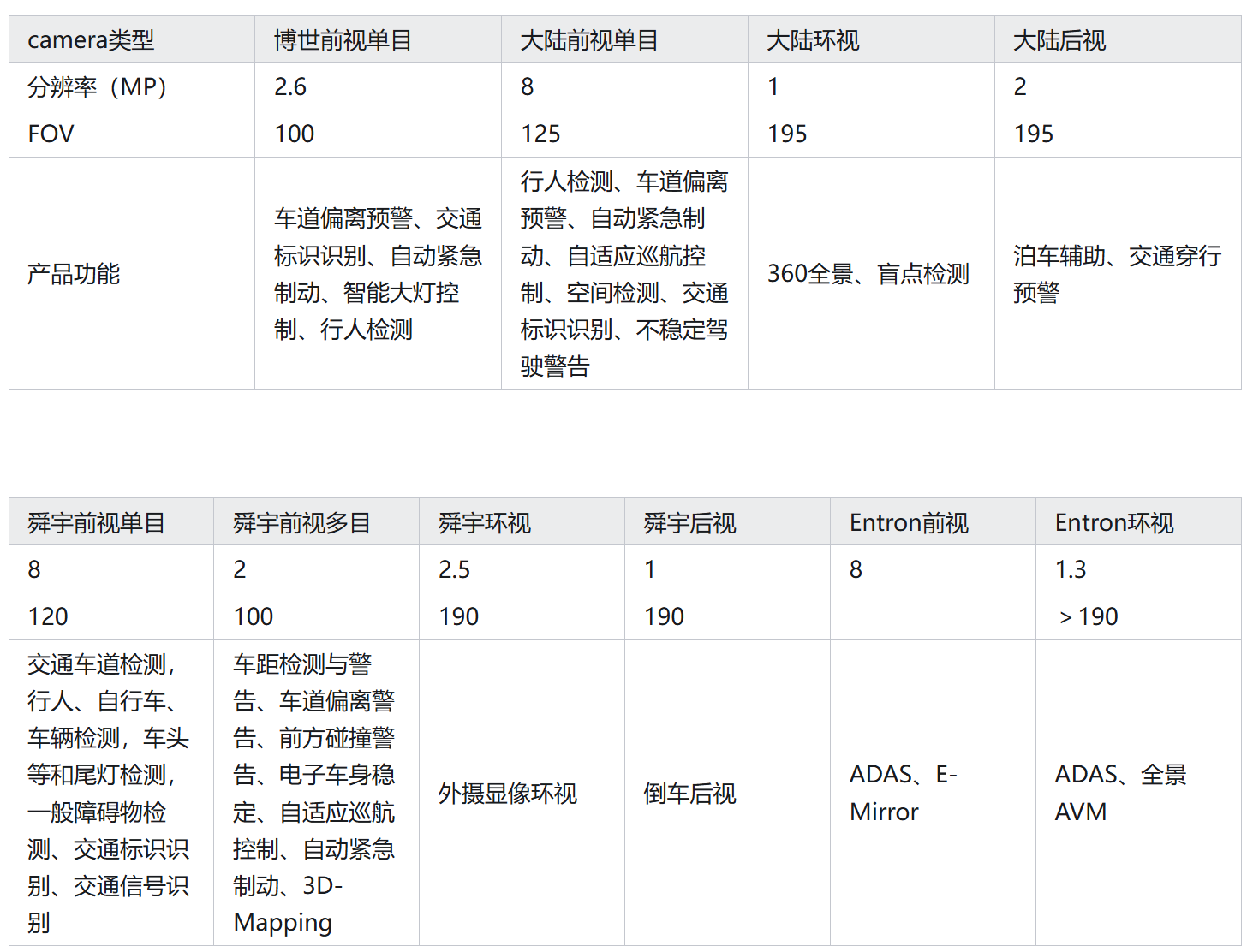
綜上,Camera開發的技術路線如果選擇統一CIS,后續配合不同的Lens得到不同應用的Camera。參考Tesla和Mobileye,這樣會帶來綜合成本(單物料總量最大,維護物料品類最少)最優,以及對Serdes接口種類、ISP需求都會統一化,另外也會對后端感知算法的圖片裁切統一化帶來便利。
但是也存在挑戰:需要和算法協調出一個最合適的Pixel值,以及和域控端的接口、算力等協調,最終確定一個適合的Pixel值,目前看似乎行業主流選擇如下
行車全部8MP,泊車5MP或者3MP;或者前視后視8MP,其他都是為5MP或者3MP。
2、自駕Camera開發的成本問題
單獨的CIS模塊在以上技術方案的基礎上還需要配合Serialier(Camera端)和Deserilizer(中央域控端),需要加上連接器和線纜的成本。
這塊的成本又和CIS的像素相關,當前CIS的選擇不會超過8MP,GMSL2 6Gbps/Lane可以支持該數據傳輸量。
挑戰:Serdes成本過高,以及Serdes品類過多,是否可以協調,統一Pixel后,統一Serdes需求,同時Camera端的加串和域控端的解串統一議價;另外可以同APHY芯片的選取結合,在Serdes上以及車載Camera上帶來數據率提升以及成本降低(相當于OEM增加了一倍的Serdes芯片采購量,具有更好的議價權,另外APHY芯片的供應商選擇更多,也帶來了供應商競爭降本)。
從APHY角度,可以實現Camera端的加串器供應商和中央域控端的解串器供應商解耦,增加了串行器供應商數量,可以實現競爭性的成本降低。
3、自駕Camera開發的適用性問題
未來自駕架構的發展需要滿足:既要集成度提升(算力向域控集中),又要技術領先性,還要整體成本最低; 在傳統的傳感器架構下,以及傳統的Tier1開發+OEM適配模式,是否還能滿足未來自駕架構的發展需求,這一點需要討論; 參考Tesla和Mobileye的模式,從完整自駕系統方案出發,盡量單一化Camera的CIS,帶來的好處眾多,這個也對后續ISP的統一化,感知算法的輸入圖片裁切統一化都會大大減少適配工作量。
從端到端的算法角度考慮,統一化Camera傳感器數據接口(對感知算法而言只有一種圖片格式輸入),有助于end-to-end的迭代演進;










常用管理SQL命令(3))




的詳解、常見場景、常見問題及最佳解決方案的綜合指南)

![[leetcode] 位運算](http://pic.xiahunao.cn/[leetcode] 位運算)
函數,eval()函數,include)

