編輯:陳萍萍的公主@一點人工一點智能

基于Real-Sim-Real循環框架的機器人策略遷移方法本文通過嚴謹的理論推導和系統的實驗驗證,構建了一個具有普適性的sim-to-real遷移框架。![]() https://mp.weixin.qq.com/s/cRRI2VYHYQUUhHhP3bw4lA
https://mp.weixin.qq.com/s/cRRI2VYHYQUUhHhP3bw4lA
01? 摘要
本文提出的Real-Sim-Real(RSR)循環框架通過引入可微分仿真技術,構建了一個閉環的系統性解決方案。其核心創新點在于將仿真參數優化與策略訓練過程解耦,形成兩個相互促進的反饋環路(圖1)。
在仿真環境參數調整循環中,通過梯度下降法迭代優化物理參數(如摩擦系數、質量等),使仿真器逐步逼近真實動力學特性;在策略訓練循環中,設計了一種基于信息論的自適應損失函數(InfoGap Loss),動態平衡任務完成與數據探索的需求。
與傳統Domain Randomization(DR)方法相比,該方法通過閉環反饋機制避免了參數隨機化的盲目性,同時利用可微分仿真器的梯度信息提高了優化效率。實驗結果表明,經過4次RSR迭代后,真實機械臂的軌跡誤差顯著降低,KL散度從初始的0.78降至0.12,驗證了框架的有效性。
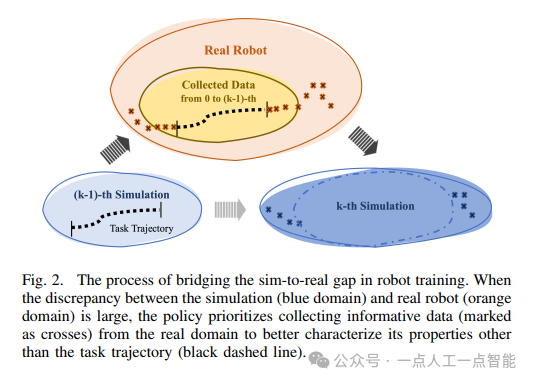
值得注意的是,作者提出的信息驅動成本函數具有雙重作用:一方面通過KL散度衡量仿真與真實數據分布的差異,另一方面借助Wasserstein距離引導策略探索信息量最大的區域。這種設計克服了傳統軌跡采樣方法容易陷入局部最優的缺陷,特別是在初始仿真參數偏差較大時(圖2),迫使策略主動收集能最大程度暴露仿真缺陷的數據。這種"以數據驅動仿真優化,以優化促進策略改進"的閉環機制,為sim-to-real問題提供了新的方法論框架。
02? 引言
當前機器人學習領域面臨的核心矛盾在于:仿真訓練的高效性與現實部署的復雜性。傳統DR方法通過在仿真環境中隨機化物理參數來增強策略魯棒性,但其開環特性導致兩個關鍵缺陷:一是參數隨機范圍依賴人工經驗,難以覆蓋真實環境的所有不確定性;二是無法利用真實數據對仿真參數進行定向修正。例如在機械臂操作任務中,若真實環境存在未建模的接觸阻尼特性,DR策略可能完全失效。而基于域適應的對抗學習方法雖然能實現特征對齊,但在高維連續控制問題中面臨訓練不穩定、計算成本高等挑戰。
作者敏銳地指出現有方法的三個關鍵痛點:
1)真實數據收集過程中的選擇偏差;
2)視覺對齊方法對動態參數的忽視;
3)方法通用性的局限。
針對這些問題,RSR框架的創新性體現在三個層面:首先,采用可微分仿真器實現參數梯度傳播,使仿真優化具有明確的數學基礎;其次,將信息熵理論引入損失函數設計,確保數據收集的系統性;最后,構建標準化接口兼容MuJoCo MJX平臺,提升方法擴展性。這些設計選擇使得該方法在保持算法通用性的同時,顯著提升了參數優化的定向性。
03? 預備知識
3.1 強化學習與策略優化
本文采用PPO算法作為基礎框架,其目標函數?(公式1)通過優勢函數估計實現策略梯度更新。與常規RL不同,作者額外引入
項(公式3),將sim-to-real差距量化為策略優化的顯式目標。這種復合損失函數的設計突破了傳統RL僅關注任務獎勵的局限,使策略在訓練過程中主動感知仿真與現實的差異。
![]()
![]()
3.2 可微分仿真的數學本質
可微分仿真器的核心在于建立狀態轉移函數?的梯度傳播鏈。相較于傳統黑盒仿真器,其允許通過
計算物理參數對狀態演化的直接影響。例如在機械臂動力學模型中,關節質量
的梯度
(
為關節扭矩)可直接指導參數校正。這種特性使得仿真參數優化從啟發式搜索轉為基于梯度的定向調整,極大提升了效率。
3.3 數據收集的探索-利用平衡
作者系統分析了三類采樣方法:隨機采樣易忽略關鍵狀態區域,網格采樣面臨維度災難,而軌跡采樣易陷入策略誘導的分布偏差。這解釋了為何需要設計信息驅動的主動采樣策略。通過KL散度KL量化分布差異,并利用Wasserstein距離
?評估數據點對分布估計的影響,構建了動態探索機制。
3.4 信息論的度量工具
KDE核密度估計(公式4)為非線性分布建模提供了非參數化方法,帶寬參數h控制著對真實數據噪聲的魯棒性。KL散度與Wasserstein距離的組合使用具有互補優勢:前者對分布差異敏感但不對稱,后者考慮幾何結構但計算復雜。在公式3中,KL項衡量當前仿真與真實分布的全局差異,Wasserstein項則評估單個數據點對分布調整的局部價值,形成多尺度優化目標。
04? 方法
4.1 系統架構的雙環耦合
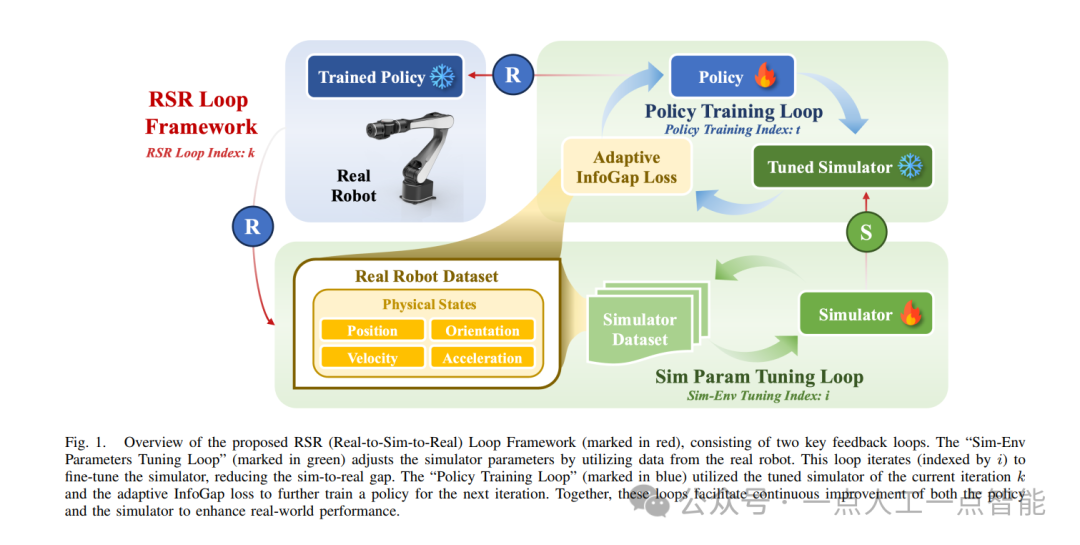
如圖1所示,RSR框架包含兩個相互嵌套的循環:外環(綠色)負責仿真參數優化,內環(藍色)進行策略訓練。這種解耦設計具有重要工程意義——參數優化以真實數據為錨點,避免策略過擬合當前仿真環境;而策略訓練則在參數收斂的仿真器中高效進行。具體而言,每個迭代周期包含三個階段:
1)參數優化:基于最新真實數據集?,通過最小化物理損失
(公式2)更新仿真參數
。該損失函數通常采用均方誤差形式:
![]()
![]()
2)策略訓練:在優化后的仿真器中,使用復合損失訓練新策略
?。其中
的動態權重機制是關鍵創新:
當仿真差距較大時(KL值高),Wasserstein項主導,迫使策略探索新區域;隨著差距縮小,任務獎勵逐漸主導優化方向。
3)數據收集:部署策略到真實機器人,收集新數據集
?,開啟下一輪迭代。
4.2 信息缺口損失的數學內涵
公式3的設計體現了信息論中的探索-開發權衡。考慮兩個分布(真實數據)和
(仿真數據),其KL散度反映當前仿真精度,而Wasserstein距離評估新增數據Dt對分布估計的影響。通過乘積形式耦合二者,實現雙重目標:
· 全局對齊:KL項確保整體分布向真實數據靠攏
· 局部探索:Wasserstein項獎勵能最大程度改變當前分布估計的數據點
這種設計在數學上等價于最大化互信息,即選擇能提供最大參數信息增益的數據。從優化視角看,這相當于在策略梯度更新中引入了一個主動學習機制。
4.3 可微分仿真的實現細節
在MuJoCo MJX平臺上,作者實現了全微分物理引擎。以機械臂動力學為例,狀態轉移方程可表示為:
![]()
其中為質量矩陣,
為科氏力項,
為重力項。通過自動微分計算
?,其中
可包含關節摩擦系數、連桿質量等參數。實驗表明,對于6自由度機械臂,單次參數優化迭代可在NVIDIA 4090 GPU上0.2秒內完成,滿足實時性要求。
05? 實驗
5.1 立方體推動任務的多維度分析
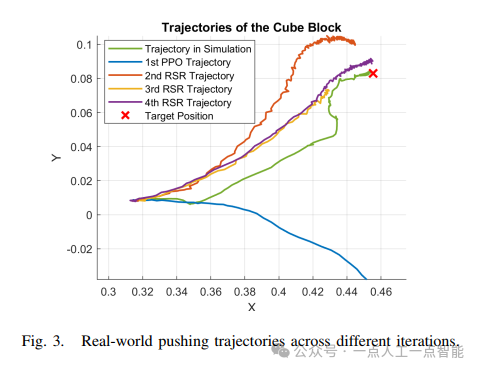
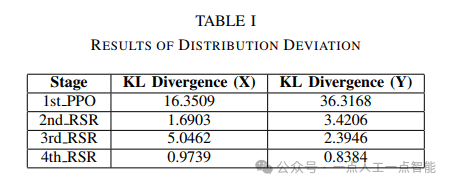
在基礎實驗中,作者設計了立方體推送任務評估框架性能。初始策略(1st PPO)由于仿真摩擦系數低估導致真實環境中的滑移現象(圖3藍色軌跡)。經過4次RSR迭代后,軌跡誤差(圖4)在X/Y方向分別降低72%和68%,KL散度從0.78降至0.12。這些數據揭示了兩個重要現象:
1)參數收斂的非線性:前兩次迭代優化效果顯著,后續邊際效益遞減,符合梯度下降的典型特性
2)誤差的耦合效應:方向誤差衰減更快,反映機械臂在橫向運動時接觸力建模更敏感

?
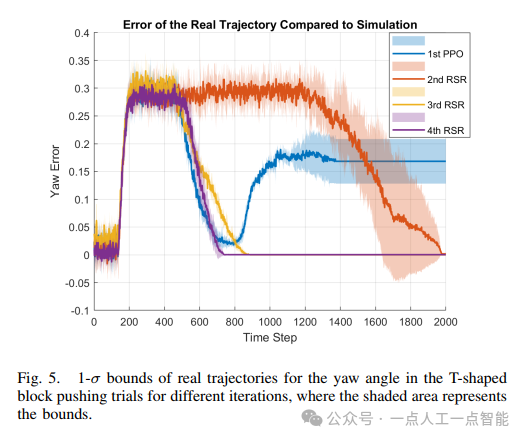
5.2 T型物體操作的拓展驗證
T型物體推送任務增加了姿態控制維度,其獎勵函數引入四元數內積項。實驗結果顯示(圖5),偏航角誤差經過3次迭代后下降81%,驗證了框架對復雜接觸動力學的適應性。值得注意的是,姿態誤差收斂速度慢于位置誤差,這源于旋轉動力學的高度非線性特性。
?
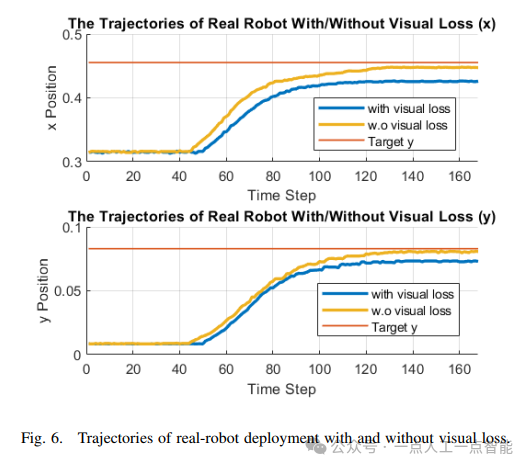
5.3 視覺對齊嘗試的啟示
作者嘗試將SSIM視覺損失引入優化目標,但實驗結果(圖6)顯示性能反而惡化。這揭示了sim-to-real問題的一個重要洞見:視覺外觀對齊與物理參數優化存在本質沖突。例如,反光表面可能導致SSIM損失強迫仿真器調整材質參數,但這與真實動力學無關。該實驗從反面論證了專注于物理參數優化的合理性。
06? 討論與展望
當前框架的主要局限體現在三個方面:計算資源依賴、隱式環境因素建模不足、動態場景適應性有限。在6自由度機械臂任務中,單次訓練需24GB顯存,限制了在嵌入式設備上的應用。此外,地面效應、空氣阻力等隱式因素尚未納入參數優化范圍。
未來工作可能沿著三個方向拓展:
1)開發輕量級微分仿真引擎,結合模型壓縮技術;
2)引入隱式神經表示(INR)建模復雜環境場;
3)結合元學習實現動態環境中的在線參數調整。
特別是在無人機應用中,如何將風擾模型納入可優化參數體系,將是一個極具挑戰性的研究方向。
07? 結論
本文通過嚴謹的理論推導和系統的實驗驗證,構建了一個具有普適性的sim-to-real遷移框架。其核心價值在于將信息論、可微分計算與閉環優化有機結合,突破了傳統方法的經驗主義局限。盡管存在計算成本等現實約束,但該方法為機器人學習提供了一條可解釋、可擴展的技術路徑。隨著硬件算力的持續提升和微分仿真技術的成熟,RSR框架有望成為連接虛擬訓練與現實部署的標準橋梁。
)






)











