筆者近期上了國科大周曉飛老師《強化學習及其應用》課程,計劃整理一個強化學習系列筆記。筆記中所引用的內容部分出自周老師的課程PPT。筆記中如有不到之處,敬請批評指正。
文章目錄
- 2.1 動態規劃:策略收斂法/策略迭代法
- 2.2 動態規劃:值迭代法
總的來說,DP方法就是在已知bellman方程的環境參數(回報R和轉移概率P)的情況下,求取最優策略 u ? u^* u?和最優值 v ? v^* v?。
2.1 動態規劃:策略收斂法/策略迭代法
總體思路:算V --> 算Q --> 策略改進 (不斷重復)
初始化最優策略 u,
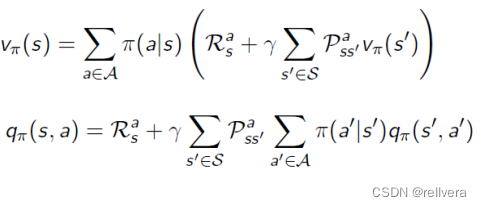
Step1 策略評估: 確定當前策略 𝜋 的值函數 V π V^π Vπ,可通過下面的式子求解。
Step2 計算動作值函數Q: 使用值函數 V π V^π Vπ來計算每個狀態-動作對的動作值函數 Q π ( s , a ) Q^π(s,a) Qπ(s,a)。這一步是為了計算在當前策略 𝜋 下,每個狀態-動作對的期望回報。
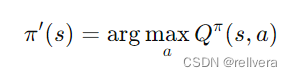
Step3 策略改進: 對每個狀態 𝑠 選擇能使 Q π ( s , a ) Q^π(s,a) Qπ(s,a)最大的動作𝑎,從而形成新的策略 𝜋′。這一步是為了更新策略,使其更接近最優策略。
Step4: goto Step1, 直到最優策略u不變。
2.2 動態規劃:值迭代法
值迭代(Value Iteration)是一種用于求解馬爾可夫決策過程(MDP)的經典動態規劃算法。它通過迭代地更新值函數,逐步逼近最優值函數 V ? V^* V? ,最終得到最優策略 π ? π^* π?。

值迭代一般分為這幾個步驟:
step1 初始化:設定初始值函數 V ( s ) V(s) V(s)為零或其他任意值。
step2 迭代更新:對于每個狀態 𝑠 ,根據當前值函數 V k V_k Vk?計算新的值函數 V k + 1 V_{k+1} Vk+1?。這個更新過程通過遍歷所有狀態和所有可能的動作,計算在每個狀態下采取每個動作所能獲得的期望累計獎勵,并選擇其中的最大值作為新的值函數值。

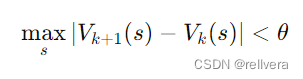
step3 收斂判定:當值函數的變化小于某個預設的閾值 𝜃 時,認為值函數已經收斂,可以停止迭代。
step4 策略提取:在值函數收斂后,通過值函數 V ? V^* V? 提取最優策略 π ? π^* π?:

關于值迭代,也有很多處理技巧,這里簡單介紹三種。
(1)In-place Dynamic Programming
在標準的值迭代過程中,我們通常會維護兩個值函數,一個用于保存當前迭代的結果,另一個用于保存上一次迭代的結果。而在 In-place Dynamic Programming 中,我們只使用一個值函數數組,在每次更新時直接覆蓋舊的值。
特點:只需要一個數組來存儲值函數,減少了內存消耗。
(2)Prioritized Sweeping
是一種加速值迭代的方法,通過優先更新那些對值函數變化影響較大的狀態,從而提高收斂速度。
(3)Real-time Dynamic Programming (RTDP)
是一種在實際運行過程中更新值函數的方法,適用于在線學習。


)
 C. To Add or Not to Add 題解 前綴和 二分)



 概述)



線程)


和longjmp())



)
