以前使用過yolov5+deepsort實現過車輛進出流量統計+車輛實時測速,可以看我往期視頻,這回改成yolov8+bytetrack實現,實時性更好,原理和原來一樣。車流量進出統計+車速測量優點:
- 使用目標檢測算法考慮bbox抖動,解決了bbox抖動造成統計錯誤
- 分別采用流和視頻分開統計時間,由于視頻和流差異,造成視頻統計不準確,因為視頻按幀讀取,并不是簡單作時間差而是需要統計幀間隔數和fps進而推算出視頻精確時間差。
- 流處理車輛速度計算公式:
車速=單位像素車速x像素偏移/(車輛當前位置時間-車輛進入時間)
時間為電腦本地時間或者在線北京時間
視頻處理車速計算公式:
車速=單位像素車速x像素偏移/((當前幀索引-車輛進入幀索引)x(1/FPS))
【效果截圖】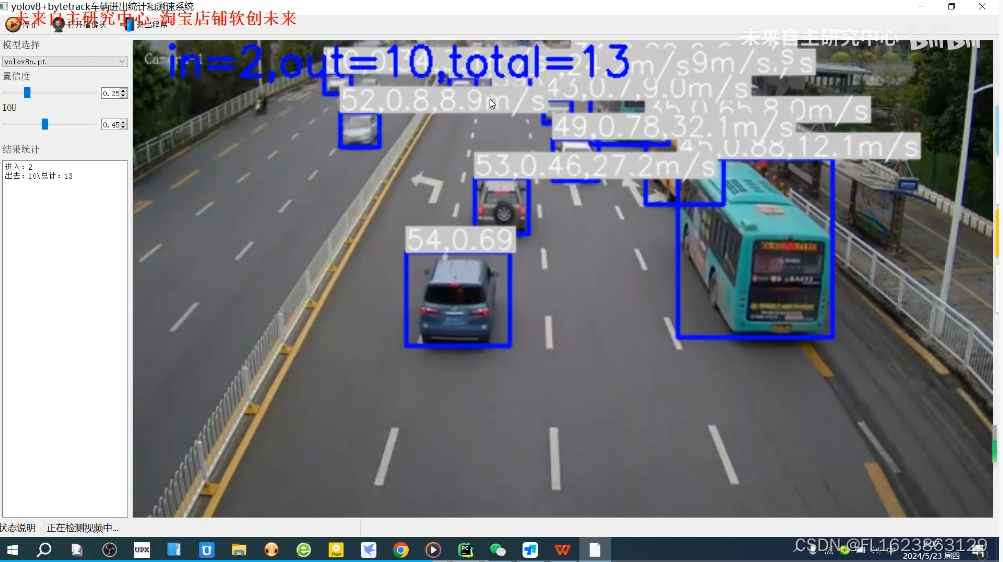
【視頻演示】
基于yolov8+pyqt5實現車輛進出流量統計+車輛實時測速_嗶哩嗶哩_bilibili測試環境:torch==1.9.0+cu111torchvision==0.10.0+cu111ultralytics==8.2.2以前使用過yolov5+deepsort實現過車輛進出流量統計+車速測量,這次更換為yolov8+bytetrack,代碼高度封裝,不冗余, 視頻播放量 1、彈幕量 0、點贊數 0、投硬幣枚數 0、收藏人數 0、轉發人數 0, 視頻作者 未來自主研究中心, 作者簡介 未來自主研究中心,相關視頻:基于目標檢測通用pyqt5界面設計讀取圖片攝像頭視頻文件,使用C++部署yolov8的onnx和bytetrack實現目標追蹤,YOLOv8檢測界面-PyQt5實現第二套界面演示,C++使用純opencv去部署yolov8官方obb旋轉框檢測,將yolov5-6.2封裝成一個類幾行代碼完成語義分割任務,基于yolov8+bytetrack實現目標追蹤視頻演示,yolov5+bytetrack+pyqt5實現目標追蹤,基于yolov5的單目測距視頻演示,C++使用純opencv部署yolov9的onnx模型,使用C++部署yolov9的tensorrt模型進行目標檢測![]() https://www.bilibili.com/video/BV1yt421K7w4/?vd_source=989ae2b903ea1b5acebbe2c4c4a635ee
https://www.bilibili.com/video/BV1yt421K7w4/?vd_source=989ae2b903ea1b5acebbe2c4c4a635ee
【測試環境】
torch==1.9.0+cu111
torchvision==0.10.0+cu111
ultralytics==8.2.2
)











)


)

容器作用是什么?)

