目 ?錄
1 ?緒論?? ?1
1.1 選題的背景及意義?? ?1
1.2 ?水下管道巡檢機器人的分類?? ?2
1.2.1 管道巡檢技術的分類?? ?2
1.2.2管道巡檢機器人的分類?? ?2
1.3 研究的現狀?? ?3
1.3.1 ?國內的研究現狀?? ?3
1.3.2 ?國外的研究現狀?? ?4
1.4 水下管道巡檢機器人的發展趨勢?? ?5
1.5 ?本次設計主要研究內容?? ?5
2 ?水下管道巡檢機器人的總體方案設計?? ?7
2.1 水下管道巡檢機器人的性能指標?? ?7
2.2 采用的研究方法?? ?7
2.2 系統的總體方案設計?? ?7
2.3 總體方案的創新點?? ?9
3 ?水下管道巡檢機器人的阻力分析和元器件選型?? ?10
3.1 浮力分析?? ?10
3.2 阻力分析?? ?10
3.3 水下電機的選型計算?? ?11
3.3.1 ?水下推進器的選型計算?? ?11
3.4 水下機械手的選型計算?? ?12
3.4.1 ?結構方案設計?? ?12
3.4.2 ?夾持裝置設計?? ?13
3.4.3 ?夾持電機的選型?? ?14
4 ?水下巡檢機器人控制系統的設計?? ?15
4.1 主控單片機的選型?? ?15
4.2 視覺檢測傳感器的選型?? ?15
4.3 電機驅動的選型設計?? ?16
5 ?水下巡檢機器人的三維建模與有限元分析?? ?18
5.1 soldworks?? ?18
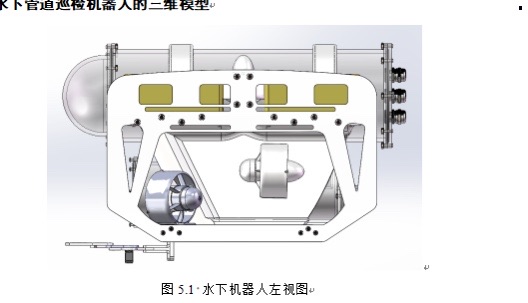
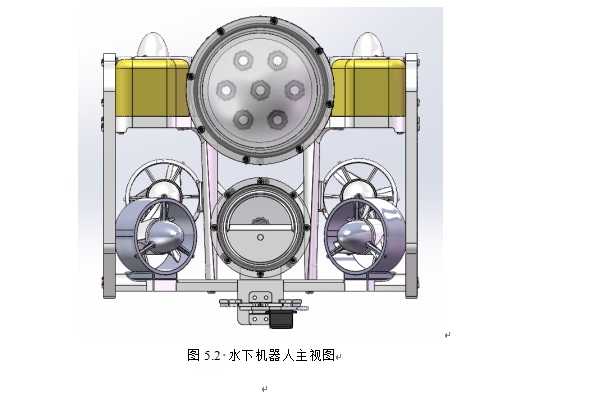
5.2 水下管道巡檢機器人的三維模型?? ?19
5.3 水下管道巡檢機器人的有限元分析?? ?20
5.3.1 ?ansys workbench?? ?20
5.3.2 ?有限元分析的目的?? ?21
5.3.3 ?材料的選擇?? ?22
5.3.4 ?網格劃分?? ?22
5.3.5 ?施加載荷?? ?23
5.3.6 ?后處理?? ?23
5.4 ?水下巡檢機器人的工藝性分析?? ?24
5.5 ?水下巡檢機器人經濟成本分析?? ?24
6 ?總結和展望?? ?26
6.1 ?總結?? ?26
6.2 ?展望?? ?26
致 ?謝?? ?27
文 獻 參 考?? ?28
1 ?緒論
1.1 選題的背景及意義
隨著科技的發展,管道運輸憑借其成本低、傳送量大等優點,在水下油氣運輸領域得到了廣泛的應用[1]。眾所周知,海洋蘊藏著巨大的資源,例如石油、天然氣等。隨著人口的加劇,我國工業化腳步的推進,我國基礎工業的建設對于能源的需求越來越大,于此同時,隨著科技的發展,各種水下機器人應運而生,這對于水下世界的探索具有重要的引領作用。通過各種水下機器人對于水下世界的探索,越來越多的水下油氣資源被發現,我國迫切需要完成對于水下油氣資源的開采和利用[2][3]。上世紀80年代以來,隨著海底石油、天然氣的開采,水下管道作為一種重要的物料運輸設施,得到了廣泛的應用,水下管道運輸相比于傳統的陸地運輸方式,具有更大的優勢,便捷經濟的優勢得到越來越多的青睞。水下管道運輸是除海陸空運輸以外最重要的運輸方式,主要為燃油能源運輸提供便利。目前世界上石油天然氣的總管道長度大概是200萬千米,我國中長距離管道運輸的總長度在2萬千米左右,世界上約有50%的管道需要長時間的使用,而這些管道大部分都位于地下、海底、水下等比較復雜的介質中,這就使得人們對于管道的日常巡檢困難加劇,工作人員不能及時發現管道的故障問題,從而造成各種事故,危害人們的健康。到現在為止,我國的油氣儲運管道一共發生了628次危險事故,260余人受傷,損失約2.5億美元[4][5],海洋管道一旦發生泄漏或者破壞,就會對周圍的人和環境產生嚴重危險。因此研究水下管道破損自動巡檢技術,提高檢測的可靠性和自動化,改善人員作業環境,降低勞動強度,提高自動化水平,對提高管道運輸的安全性具有重要的社會意義[6][7]。
隨著我國城市基礎工業的發展,對管道的需求也越來越多,而這些管道大部分都位于地下或者水下,管道的日常維護和保養就顯得格外困難。同時隨著我國海洋戰略的推進,我國對于海底石油資源的開采,就需要大量的水下管道來進行油氣的儲運。與此同時,為避免水下管道在運輸的時候出現各種危害人們健康的時間發生,就需要加強水下管道的巡檢工作,因此就需要設計研發一些可以用于水下管道巡檢的外壁檢測機器人。水下管道巡檢機器人可以提高巡檢的作業效率、降低成本,因此通過本次設計可以為未來水下管道巡檢機器人的研發創新打下堅實的基礎,對我國海洋資源的開發和海洋工程的作業有著重大的意義。
1.2 ?水下管道巡檢機器人的分類
1.2.1 管道巡檢技術的分類
管道檢測機器人根據檢測目標的不同,可以分為兩種,一種是用于檢測管道外壁的機器人,這種巡檢機器人的體積一般來說比較大,同時還具有清除管道外壁吸附物的功能。另外一種是專門用來檢測管道內壁的機器人,這種機器人的體積一般比較小,主要可以用來檢測管道內壁的裂縫等。管道巡檢機器人常用的檢測算法分別是視覺檢測算法,視覺跟蹤算法等。本文主要研究的是水下管道外巡檢機器人的結構設計[8][9]。
1.2.2管道巡檢機器人的分類
水下管道巡檢機器人根據其與地面的聯系方式的不同,分為遙控水下管道巡檢機器人,簡稱ROV,自治水下管道機器人簡稱AUV,和混合型RHOV水下機器人如下圖1.1所示[10]。
圖1.1 水下管道外巡檢機器人分類
ROV水下巡檢機器人是一種遠程的遙控巡檢機器人,在機器人身上安裝有多種視覺檢測傳感器和無線通信傳感器,可以實現遠程遙控的功能。通過工作母船放在海洋管道上,用來傳送數據和操作指令,完成水下管道的無損檢測。
AUV是自主運行的,不需要人為去干預,因為其行為不受母船控制,所有其巡檢范圍大,完成依靠自己去檢測,工作效率高。
RHOV主要適用于海洋大范圍管道的巡檢,利用機器視覺和無線通信技術,完成管道的無損巡檢和信息采集,RHOV將ROV和AUV技術進行結合,可以自主運行也可以遙控運行,適用范圍比較廣。
1.3 研究的現狀
目前水下管道外巡檢機器人的研究主要是集中在歐美國家,其研制的機器人自動化程度更高,更先進。Oceanneering公司設計研發的Magna海底隧道檢測機器人和Tracerco公司設計研發的Discovery海底隧道檢測機器人代表著目前水小管道外檢測技術最先進的水平[11][12]。
1.3.1 ?國內的研究現狀
我國對于水下管道巡檢機器人的研究工作時間并不是特別長,相比于國外來說,起步時間比較晚,我國對于水下管道巡檢機器人的研究工作其中有一部分處于實驗室模擬狀態,目前還沒有應用于實際的工作場景。但是一些高校和研究所在水下管道巡檢機器人取得了顯著的成就。
其中哈爾濱工業大學設計研制的實時監測管道機器人可以輕松實現管道外壁的巡檢工作,其主要是由六部分組成,分別是移動載體、視覺定位、無線裝置、X射線機、檢測系統和防護系統等[13]。我國的西安交通大學也設計研發了一些水下管道巡檢機器人,用于管道內壁的巡檢工作,采用的是一種蠕動式的前進方式,采用電磁鐵可以吸附的特性行走于管道外壁。
上海交通大學設計研發的小
 ?
?
 ?
?
 ?
?
 ?
?
 ?
?
 ?
?
?
![[從零開始面試算法] (11/100) LeetCode 226. 反轉二叉樹:遞歸的“鏡像”魔法](http://pic.xiahunao.cn/[從零開始面試算法] (11/100) LeetCode 226. 反轉二叉樹:遞歸的“鏡像”魔法)







![[UT]記錄case中seq.start(sequencer)的位置變化帶來的執行行為的變化](http://pic.xiahunao.cn/[UT]記錄case中seq.start(sequencer)的位置變化帶來的執行行為的變化)
)

)







