在2023年,betaflight騰飛,而cleanflight已經結束更新,但是用cleanflight的原因是因為他最后版本支持stm32f103系列。不用betaflight因為手頭還沒有f405和f411,只有一個不支持的f407和f401,所以。。
接下來開始步驟:
下載地面站cleanflight和betaflight,在github上自行搜索,關鍵詞cleanflight ,接著下載cleanflight和betaflight支持的固件,關鍵詞cleanflight firmware。
使用的stm32f103c8t6板子選擇src/main/target/NAZE
這里使用的是cleanflight的,2023年的betaflight還是支持f103的,編譯步驟也是一樣,但是要和適配版本的地面站配合使用。
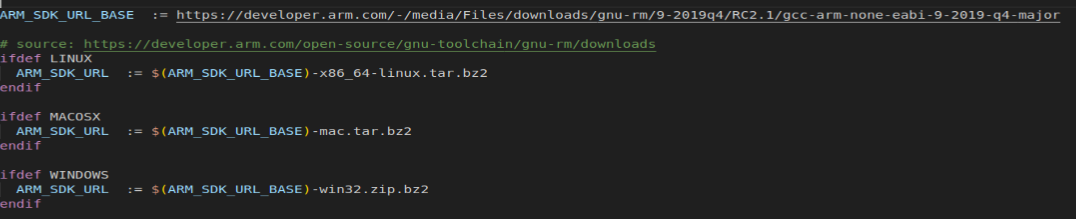
下載交叉編譯器
打開make/tool.mk文件可以看到,這個便是交叉編譯器的網址,在瀏覽器打開會直接下載工具。
這里展示的交叉編譯環境是虛擬機Ubuntu,將下載的交叉編譯工具解壓到/opt文件夾下,并在~/.bashrc文件添加gcc和g++的路徑
sudo tar -xvf yourcross-tools.tar.bz2 -C /opt
# <<< cleanflight_gcc for NAZE <<<
export PATH=${PATH}:/opt/your-crosstools/bin
# >>> cleanflight_gcc for NAZE >>>
編譯目標飛控
make TARGET=NAZE
make clean TARGET=NAZE 編譯默認的發現FLASH溢出問題。通過去除部分功能減少體積
編譯成功會在obj下生成hex文件,其中_.hex有元數據簽名塊,會加大hex體積,用.hex即可。
修改target.h文件
/** This file is part of Cleanflight.** Cleanflight is free software. You can redistribute* this software and/or modify this software under the terms of the* GNU General Public License as published by the Free Software* Foundation, either version 3 of the License, or (at your option)* any later version.** Cleanflight is distributed in the hope that it* will be useful, but WITHOUT ANY WARRANTY; without even the implied* warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.* See the GNU General Public License for more details.** You should have received a copy of the GNU General Public License* along with this software.** If not, see <http://www.gnu.org/licenses/>.*/#pragma once#define USE_TELEMETRY_IBUS#define USE_TARGET_CONFIG
#define TARGET_VALIDATECONFIG
#define USE_HARDWARE_REVISION_DETECTION
#define TARGET_BUS_INIT#define DEFAULT_VOLTAGE_METER_SOURCE VOLTAGE_METER_ADC#define LED0_PIN PB3
#define LED1_PIN PB4#define USE_BEEPER
#define BEEPER_PIN PA12#if defined(AFROMINI)
#define BEEPER_INVERTED
#define TARGET_BOARD_IDENTIFIER "AFMN"
#elif defined(BEEBRAIN)
#define BRUSHED_MOTORS
#undef USE_SERVOS
#define TARGET_BOARD_IDENTIFIER "BEBR"
#define USE_TARGET_CONFIG
#define DEFAULT_FEATURES FEATURE_MOTOR_STOP
#else
#define TARGET_BOARD_IDENTIFIER "AFNA"
// Beeper configuration is handled in 'config.c', since it is dependent on hardware revision
#endif//#define BARO_XCLR_PIN PC13
//#define BARO_EOC_PIN PC14#define INVERTER_PIN_UART2 PB2 // PB2 (BOOT1) abused as inverter select GPIO#define USE_RX_MSP#define USE_EXTI
#define MAG_INT_EXTI PC14
#define USE_GYRO_EXTI
#define GYRO_1_EXTI_PIN PC13
#define MMA8451_INT_PIN PA5#define USE_MPU_DATA_READY_SIGNAL
#define USE_MAG_DATA_READY_SIGNAL#define USE_SPI
#define USE_SPI_DEVICE_2#define NAZE_SPI_INSTANCE SPI2
#define NAZE_SPI_CS_PIN PB12// We either have this 16mbit flash chip on SPI or the MPU6500 acc/gyro depending on board revision:
#define FLASH_CS_PIN NAZE_SPI_CS_PIN
#define FLASH_SPI_INSTANCE NAZE_SPI_INSTANCE#define GYRO_1_CS_PIN NAZE_SPI_CS_PIN
#define GYRO_1_SPI_INSTANCE NAZE_SPI_INSTANCE#define USE_FLASHFS
#define USE_FLASH_M25P16#define USE_GYRO
// #define USE_GYRO_MPU3050
#define USE_GYRO_MPU6050
// #define USE_GYRO_MPU6500
// #define USE_GYRO_SPI_MPU6500#define GYRO_1_ALIGN CW0_DEG#define USE_ACC
//#define USE_ACC_ADXL345
//#define USE_ACC_BMA280
//#define USE_ACC_MMA8452
#define USE_ACC_MPU6050
// #define USE_ACC_MPU6500
// #define USE_ACC_SPI_MPU6500//#define ACC_ADXL345_ALIGN CW270_DEG
//#define ACC_MMA8452_ALIGN CW90_DEG
//#define ACC_BMA280_ALIGN CW0_DEG// Barometer dropped to make flash space
//#define USE_BARO
//#define USE_BARO_MS5611 // needed for Flip32 board
//#define USE_BARO_BMP280// Compass dropped to make flash space
//#define USE_MAG
//#define USE_MAG_HMC5883
//#define MAG_HMC5883_ALIGN CW180_DEG// Rangefinder dropped to make flash space
//#define USE_RANGEFINDER
//#define USE_RANGEFINDER_HCSR04
//#define RANGEFINDER_HCSR04_TRIGGER_PIN PB0
//#define RANGEFINDER_HCSR04_ECHO_PIN PB1
//#define RANGEFINDER_HCSR04_TRIGGER_PIN_PWM PB8
//#define RANGEFINDER_HCSR04_ECHO_PIN_PWM PB9#define USE_UART1
#define USE_UART2
/* only 2 uarts available on the NAZE, add ifdef here if present on other boards */
//#define USE_UART3
// #define USE_SOFTSERIAL1
// #define USE_SOFTSERIAL2
#define SERIAL_PORT_COUNT 4#define SOFTSERIAL1_RX_PIN PA6 // PWM 5
#define SOFTSERIAL1_TX_PIN PA7 // PWM 6#define SOFTSERIAL2_RX_PIN PB0 // PWM 7
#define SOFTSERIAL2_TX_PIN PB1 // PWM 8#define UART3_RX_PIN PB11
#define UART3_TX_PIN PB10#define USE_I2C
#define USE_I2C_DEVICE_2
#define I2C_DEVICE (I2CDEV_2)// #define SOFT_I2C // enable to test software i2c
// #define SOFT_I2C_PB1011 // If SOFT_I2C is enabled above, need to define pinout as well (I2C1 = PB67, I2C2 = PB1011)
// #define SOFT_I2C_PB67#define USE_ADC
#define CURRENT_METER_ADC_PIN PB1
#define VBAT_ADC_PIN PA4
#define RSSI_ADC_PIN PA1
#define EXTERNAL1_ADC_PIN PA5#define DEFAULT_RX_FEATURE FEATURE_RX_PPM// IO - assuming all IOs on 48pin package
#define TARGET_IO_PORTA 0xffff
#define TARGET_IO_PORTB 0xffff
#define TARGET_IO_PORTC ( BIT(13) | BIT(14) | BIT(15) )#define USABLE_TIMER_CHANNEL_COUNT 14
#define USED_TIMERS ( TIM_N(1) | TIM_N(2) | TIM_N(3) | TIM_N(4) )
通過注釋USE_XX減少體積,這里去掉了軟串口和不要的MPU6050,實際上什么功能都可以不要,畢竟目的只是嘗試使用。
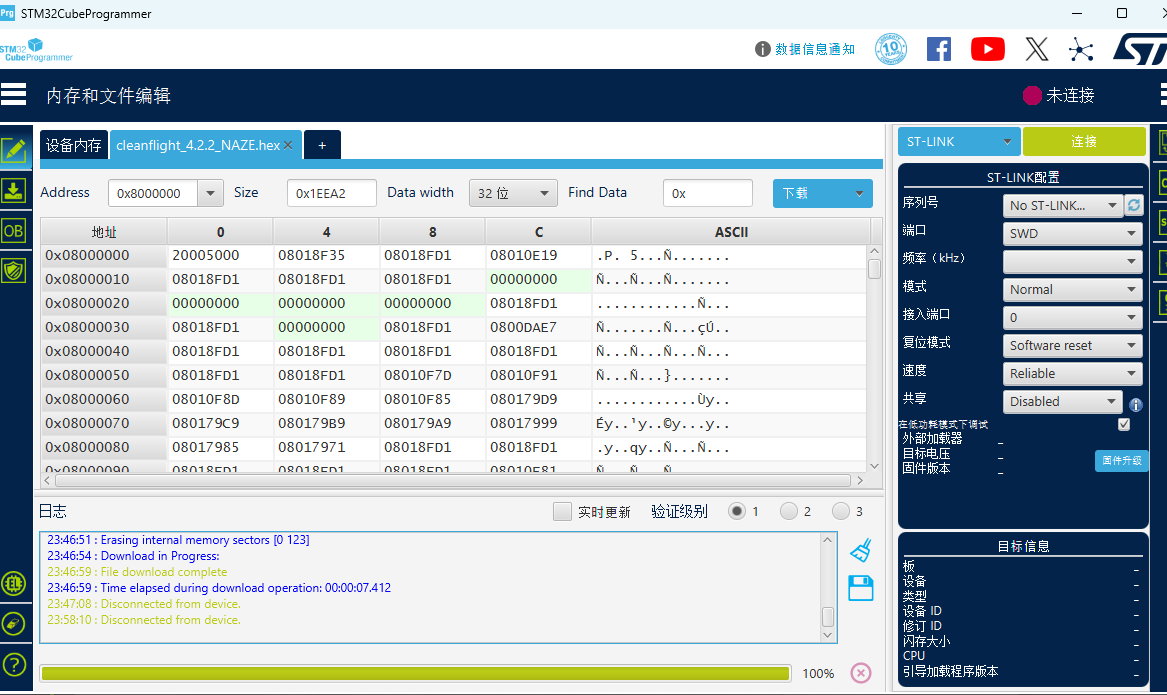
下載程序
hex二進制文件得到可以用stm32CubeProgramer或者其他方法燒錄,這邊用stlink下載,當然可以串口和jlink下載。
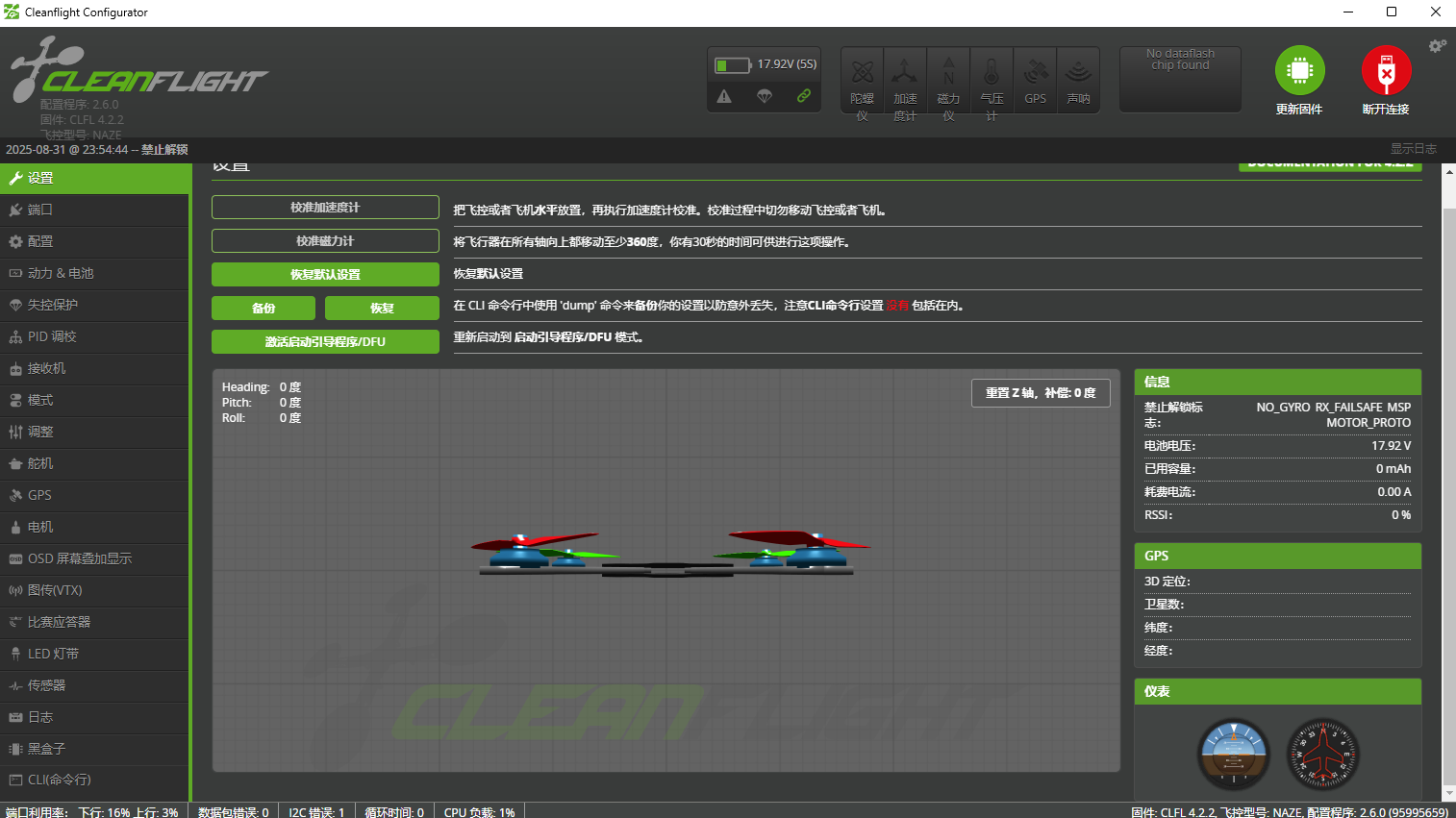
地面站查看
用ch340連接PA9和PA10串口引腳(電平3.3v)

連接電腦并查看端口,點擊連接便會有以下界面
進階使用以后更新。。

)

及常見問題解答)





內容大綱)
)





![洛谷 P1077 [NOIP 2012 普及組] 擺花-普及-](http://pic.xiahunao.cn/洛谷 P1077 [NOIP 2012 普及組] 擺花-普及-)

)
)