DAY 41 簡單CNN
知識回顧
- 數據增強
- 卷積神經網絡定義的寫法
- batch歸一化:調整一個批次的分布,常用與圖像數據
- 特征圖:只有卷積操作輸出的才叫特征圖
- 調度器:直接修改基礎學習率
卷積操作常見流程如下:
1. 輸入 → 卷積層 → Batch歸一化層(可選) → 池化層 → 激活函數 → 下一層
- Flatten -> Dense (with Dropout,可選) -> Dense (Output)
一、數據增強
在圖像數據預處理環節,為提升數據多樣性,可采用數據增強(數據增廣)策略。該策略通常不改變單次訓練的樣本總數,而是通過對現有圖像進行多樣化變換,使每次訓練輸入的樣本呈現更豐富的形態差異,從而有效擴展模型訓練的樣本空間多樣性。
常見的修改策略包括以下幾類
1. 幾何變換:如旋轉、縮放、平移、剪裁、裁剪、翻轉
2. 像素變換:如修改顏色、亮度、對比度、飽和度、色相、高斯模糊(模擬對焦失敗)、增加噪聲、馬賽克
3. 語義增強(暫時不用):mixup,對圖像進行結構性改造、cutout隨機遮擋等
此外,在數據極少的場景長,常常用生成模型來擴充數據集,如GAN、VAE等。
import torch
import torch.nn as nn
import torch.optim as optim
from torchvision import datasets, transforms
from torch.utils.data import DataLoader
import matplotlib.pyplot as plt
import numpy as np# 設置中文字體支持
plt.rcParams["font.family"] = ["SimHei"]
plt.rcParams['axes.unicode_minus'] = False # 解決負號顯示問題# 檢查GPU是否可用
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
print(f"使用設備: {device}")# 1. 數據預處理
# 訓練集:使用多種數據增強方法提高模型泛化能力
train_transform = transforms.Compose([# 隨機裁剪圖像,從原圖中隨機截取32x32大小的區域transforms.RandomCrop(32, padding=4),# 隨機水平翻轉圖像(概率0.5)transforms.RandomHorizontalFlip(),# 隨機顏色抖動:亮度、對比度、飽和度和色調隨機變化transforms.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2, hue=0.1),# 隨機旋轉圖像(最大角度15度)transforms.RandomRotation(15),# 將PIL圖像或numpy數組轉換為張量transforms.ToTensor(),# 標準化處理:每個通道的均值和標準差,使數據分布更合理transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 測試集:僅進行必要的標準化,保持數據原始特性,標準化不損失數據信息,可還原
test_transform = transforms.Compose([transforms.ToTensor(),transforms.Normalize((0.4914, 0.4822, 0.4465), (0.2023, 0.1994, 0.2010))
])# 2. 加載CIFAR-10數據集
train_dataset = datasets.CIFAR10(root='./data',train=True,download=True,transform=train_transform # 使用增強后的預處理
)test_dataset = datasets.CIFAR10(root='./data',train=False,transform=test_transform # 測試集不使用增強
)# 3. 創建數據加載器
batch_size = 64
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True)
test_loader = DataLoader(test_dataset, batch_size=batch_size, shuffle=False)
#使用設備: cpu
#Files already downloaded and verified注意數據增強一般是不改變每個批次的數據量,是對原始數據修改后替換原始數據。其中該數據集事先知道其均值和標準差,如果不知道,需要提前計算下。
二、 CNN模型
卷積的本質:通過卷積核在輸入通道上的滑動乘積,提取跨通道的空間特征。所以只需要定義幾個參數即可
1. 卷積核大小:卷積核的大小,如3x3、5x5、7x7等。
2. 輸入通道數:輸入圖片的通道數,如1(單通道圖片)、3(RGB圖片)、4(RGBA圖片)等。
3. 輸出通道數:卷積核的個數,即輸出的通道數。如本模型中通過 32→64→128 逐步增加特征復雜度
4. 步長(stride):卷積核的滑動步長,默認為1。
# 4. 定義CNN模型的定義(替代原MLP)
class CNN(nn.Module):def __init__(self):super(CNN, self).__init__() # 繼承父類初始化# ---------------------- 第一個卷積塊 ----------------------# 卷積層1:輸入3通道(RGB),輸出32個特征圖,卷積核3x3,邊緣填充1像素self.conv1 = nn.Conv2d(in_channels=3, # 輸入通道數(圖像的RGB通道)out_channels=32, # 輸出通道數(生成32個新特征圖)kernel_size=3, # 卷積核尺寸(3x3像素)padding=1 # 邊緣填充1像素,保持輸出尺寸與輸入相同)# 批量歸一化層:對32個輸出通道進行歸一化,加速訓練self.bn1 = nn.BatchNorm2d(num_features=32)# ReLU激活函數:引入非線性,公式:max(0, x)self.relu1 = nn.ReLU()# 最大池化層:窗口2x2,步長2,特征圖尺寸減半(32x32→16x16)self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2) # stride默認等于kernel_size# ---------------------- 第二個卷積塊 ----------------------# 卷積層2:輸入32通道(來自conv1的輸出),輸出64通道self.conv2 = nn.Conv2d(in_channels=32, # 輸入通道數(前一層的輸出通道數)out_channels=64, # 輸出通道數(特征圖數量翻倍)kernel_size=3, # 卷積核尺寸不變padding=1 # 保持尺寸:16x16→16x16(卷積后)→8x8(池化后))self.bn2 = nn.BatchNorm2d(num_features=64)self.relu2 = nn.ReLU()self.pool2 = nn.MaxPool2d(kernel_size=2) # 尺寸減半:16x16→8x8# ---------------------- 第三個卷積塊 ----------------------# 卷積層3:輸入64通道,輸出128通道self.conv3 = nn.Conv2d(in_channels=64, # 輸入通道數(前一層的輸出通道數)out_channels=128, # 輸出通道數(特征圖數量再次翻倍)kernel_size=3,padding=1 # 保持尺寸:8x8→8x8(卷積后)→4x4(池化后))self.bn3 = nn.BatchNorm2d(num_features=128)self.relu3 = nn.ReLU() # 復用激活函數對象(節省內存)self.pool3 = nn.MaxPool2d(kernel_size=2) # 尺寸減半:8x8→4x4# ---------------------- 全連接層(分類器) ----------------------# 計算展平后的特征維度:128通道 × 4x4尺寸 = 128×16=2048維self.fc1 = nn.Linear(in_features=128 * 4 * 4, # 輸入維度(卷積層輸出的特征數)out_features=512 # 輸出維度(隱藏層神經元數))# Dropout層:訓練時隨機丟棄50%神經元,防止過擬合self.dropout = nn.Dropout(p=0.5)# 輸出層:將512維特征映射到10個類別(CIFAR-10的類別數)self.fc2 = nn.Linear(in_features=512, out_features=10)def forward(self, x):# 輸入尺寸:[batch_size, 3, 32, 32](batch_size=批量大小,3=通道數,32x32=圖像尺寸)# ---------- 卷積塊1處理 ----------x = self.conv1(x) # 卷積后尺寸:[batch_size, 32, 32, 32](padding=1保持尺寸)x = self.bn1(x) # 批量歸一化,不改變尺寸x = self.relu1(x) # 激活函數,不改變尺寸x = self.pool1(x) # 池化后尺寸:[batch_size, 32, 16, 16](32→16是因為池化窗口2x2)# ---------- 卷積塊2處理 ----------x = self.conv2(x) # 卷積后尺寸:[batch_size, 64, 16, 16](padding=1保持尺寸)x = self.bn2(x)x = self.relu2(x)x = self.pool2(x) # 池化后尺寸:[batch_size, 64, 8, 8]# ---------- 卷積塊3處理 ----------x = self.conv3(x) # 卷積后尺寸:[batch_size, 128, 8, 8](padding=1保持尺寸)x = self.bn3(x)x = self.relu3(x)x = self.pool3(x) # 池化后尺寸:[batch_size, 128, 4, 4]# ---------- 展平與全連接層 ----------# 將多維特征圖展平為一維向量:[batch_size, 128*4*4] = [batch_size, 2048]x = x.view(-1, 128 * 4 * 4) # -1自動計算批量維度,保持批量大小不變x = self.fc1(x) # 全連接層:2048→512,尺寸變為[batch_size, 512]x = self.relu3(x) # 激活函數(復用relu3,與卷積塊3共用)x = self.dropout(x) # Dropout隨機丟棄神經元,不改變尺寸x = self.fc2(x) # 全連接層:512→10,尺寸變為[batch_size, 10](未激活,直接輸出logits)return x # 輸出未經過Softmax的logits,適用于交叉熵損失函數# 初始化模型
model = CNN()
model = model.to(device) # 將模型移至GPU(如果可用)上述定義CNN模型中:
1. 使用三層卷積+池化結構提取圖像特征
2. 每層卷積后添加BatchNorm加速訓練并提高穩定性
3. 使用Dropout減少過擬合
可以把全連接層前面的不理解為神經網絡的一部分,單純理解為特征提取器,他們的存在就是幫助模型進行特征提取的。
2.1 batch歸一化
Batch 歸一化是深度學習中常用的一種歸一化技術,加速模型收斂并提升泛化能力。通常位于卷積層后。
卷積操作常見流程如下:
1. 輸入 → 卷積層 → Batch歸一化層(可選) → 池化層 → 激活函數 → 下一層
2. Flatten -> Dense (with Dropout,可選) -> Dense (Output)
其中,BatchNorm 應在池化前對空間維度的特征完成歸一化,以確保歸一化統計量基于足夠多的樣本(空間位置),避免池化導致的統計量偏差
旨在解決深度神經網絡訓練中的內部協變量偏移問題:深層網絡中,隨著前層參數更新,后層輸入分布會發生變化,導致模型需要不斷適應新分布,訓練難度增加。就好比你在學新知識,知識體系的基礎一直在變,你就得不斷重新適應,模型訓練也是如此,這就導致訓練變得困難,這就是內部協變量偏移問題。
通過對每個批次的輸入數據進行標準化(均值為 0、方差為 1),想象把一堆雜亂無章、分布不同的數據規整到一個標準的樣子。
1. 使各層輸入分布穩定,讓數據處于激活函數比較合適的區域,緩解梯度消失 / 爆炸問題;
2. 因為數據分布穩定了,所以允許使用更大的學習率,提升訓練效率。
深度學習的歸一化有2類:
1. Batch Normalization:一般用于圖像數據,因為圖像數據通常是批量處理,有相對固定的 Batch Size ,能利用 Batch 內數據計算穩定的統計量(均值、方差 )來做歸一化。
2. Layer Normalization:一般用于文本數據,本數據的序列長度往往不同,像不同句子長短不一,很難像圖像那樣固定 Batch Size 。如果用 Batch 歸一化,不同批次的統計量波動大,效果不好。層歸一化是對單個樣本的所有隱藏單元進行歸一化,不依賴批次。
ps:這個操作在結構化數據中其實是叫做標準化,但是在深度學習領域,習慣把這類對網絡中間層數據進行調整分布的操作都叫做歸一化 。
2.2 特征圖
卷積層輸出的叫做特征圖,通過輸入尺寸和卷積核的尺寸、步長可以計算出輸出尺寸。可以通過可視化中間層的特征圖,理解 CNN 如何從底層特征(如邊緣)逐步提取高層語義特征(如物體部件、整體結構)。MLP是不輸出特征圖的,因為他輸出的一維向量,無法保留空間維度
特征圖就代表著在之前特征提取器上提取到的特征,可以通過?Grad-CAM方法來查看模型在識別圖像時,特征圖所對應的權重是多少。-----深度學習可解釋性
我們在后續介紹。下面接著訓練CNN模型
2.3 調度器
criterion = nn.CrossEntropyLoss() # 交叉熵損失函數
optimizer = optim.Adam(model.parameters(), lr=0.001) # Adam優化器# 引入學習率調度器,在訓練過程中動態調整學習率--訓練初期使用較大的 LR 快速降低損失,訓練后期使用較小的 LR 更精細地逼近全局最優解。
# 在每個 epoch 結束后,需要手動調用調度器來更新學習率,可以在訓練過程中調用 scheduler.step()
scheduler = optim.lr_scheduler.ReduceLROnPlateau(optimizer, # 指定要控制的優化器(這里是Adam)mode='min', # 監測的指標是"最小化"(如損失函數)patience=3, # 如果連續3個epoch指標沒有改善,才降低LRfactor=0.5 # 降低LR的比例(新LR = 舊LR × 0.5)
)ReduceLROnPlateau調度器適用于當監測的指標(如驗證損失)停滯時降低學習率。是大多數任務的首選調度器,尤其適合驗證集波動較大的情況
這種學習率調度器的方法相較于之前只有單純的優化器,是一種超參數的優化方法,它通過調整學習率來優化模型。
常見的優化器有 adam、SGD、RMSprop 等,而除此之外學習率調度器有 lr_scheduler.StepLR、lr_scheduler.ExponentialLR、lr_scheduler.CosineAnnealingLR 等。

可以把優化器和調度器理解為調參手段,學習率是參數
注意,優化器如adam雖然也在調整學習率,但是他的調整是相對值,計算步長后根據基礎學習率來調整。但是調度器是直接調整基礎學習率。
# 5. 訓練模型(記錄每個 iteration 的損失)
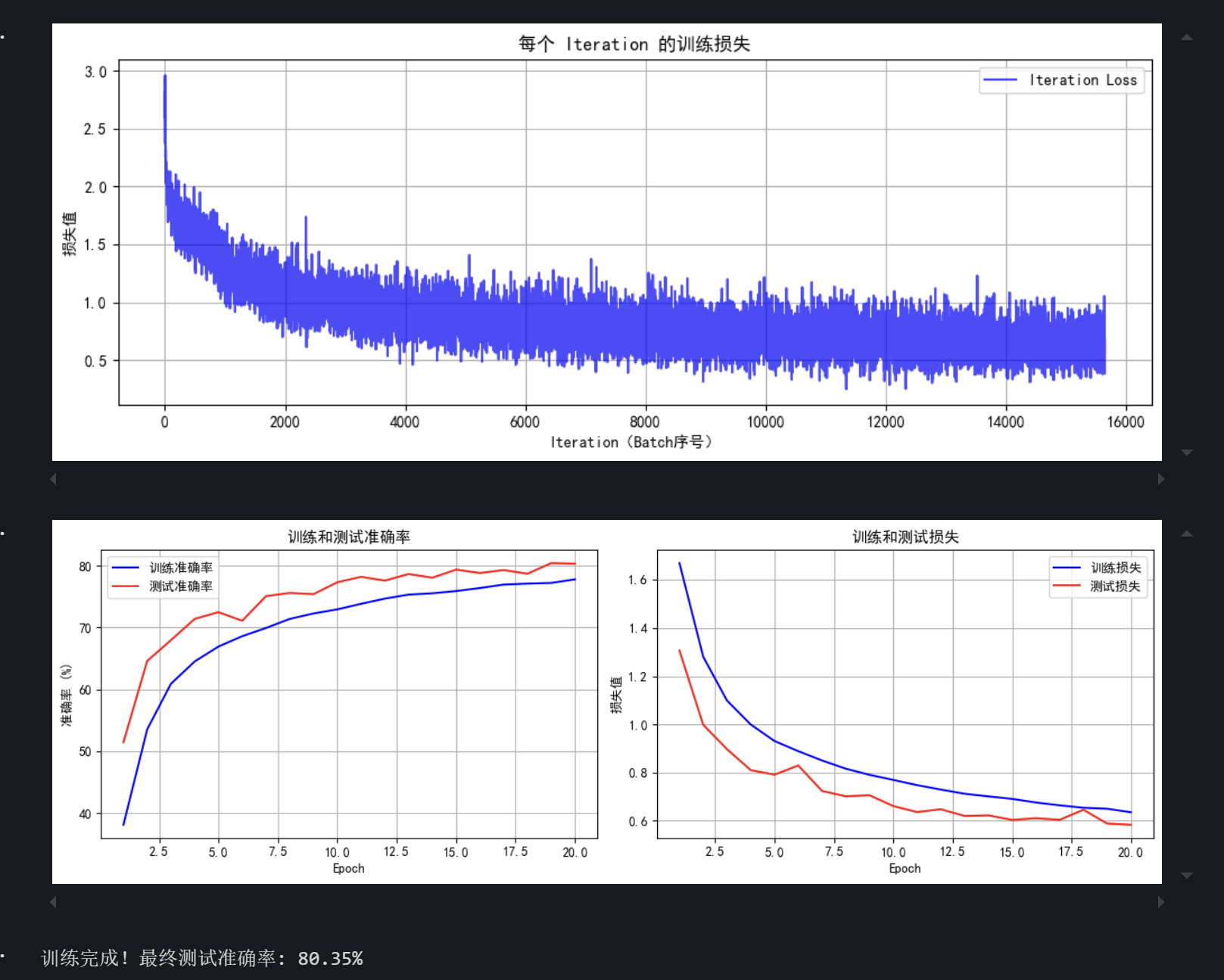
def train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs):model.train() # 設置為訓練模式# 記錄每個 iteration 的損失all_iter_losses = [] # 存儲所有 batch 的損失iter_indices = [] # 存儲 iteration 序號# 記錄每個 epoch 的準確率和損失train_acc_history = []test_acc_history = []train_loss_history = []test_loss_history = []for epoch in range(epochs):running_loss = 0.0correct = 0total = 0for batch_idx, (data, target) in enumerate(train_loader):data, target = data.to(device), target.to(device) # 移至GPUoptimizer.zero_grad() # 梯度清零output = model(data) # 前向傳播loss = criterion(output, target) # 計算損失loss.backward() # 反向傳播optimizer.step() # 更新參數# 記錄當前 iteration 的損失iter_loss = loss.item()all_iter_losses.append(iter_loss)iter_indices.append(epoch * len(train_loader) + batch_idx + 1)# 統計準確率和損失running_loss += iter_loss_, predicted = output.max(1)total += target.size(0)correct += predicted.eq(target).sum().item()# 每100個批次打印一次訓練信息if (batch_idx + 1) % 100 == 0:print(f'Epoch: {epoch+1}/{epochs} | Batch: {batch_idx+1}/{len(train_loader)} 'f'| 單Batch損失: {iter_loss:.4f} | 累計平均損失: {running_loss/(batch_idx+1):.4f}')# 計算當前epoch的平均訓練損失和準確率epoch_train_loss = running_loss / len(train_loader)epoch_train_acc = 100. * correct / totaltrain_acc_history.append(epoch_train_acc)train_loss_history.append(epoch_train_loss)# 測試階段model.eval() # 設置為評估模式test_loss = 0correct_test = 0total_test = 0with torch.no_grad():for data, target in test_loader:data, target = data.to(device), target.to(device)output = model(data)test_loss += criterion(output, target).item()_, predicted = output.max(1)total_test += target.size(0)correct_test += predicted.eq(target).sum().item()epoch_test_loss = test_loss / len(test_loader)epoch_test_acc = 100. * correct_test / total_testtest_acc_history.append(epoch_test_acc)test_loss_history.append(epoch_test_loss)# 更新學習率調度器scheduler.step(epoch_test_loss)print(f'Epoch {epoch+1}/{epochs} 完成 | 訓練準確率: {epoch_train_acc:.2f}% | 測試準確率: {epoch_test_acc:.2f}%')# 繪制所有 iteration 的損失曲線plot_iter_losses(all_iter_losses, iter_indices)# 繪制每個 epoch 的準確率和損失曲線plot_epoch_metrics(train_acc_history, test_acc_history, train_loss_history, test_loss_history)return epoch_test_acc # 返回最終測試準確率# 6. 繪制每個 iteration 的損失曲線
def plot_iter_losses(losses, indices):plt.figure(figsize=(10, 4))plt.plot(indices, losses, 'b-', alpha=0.7, label='Iteration Loss')plt.xlabel('Iteration(Batch序號)')plt.ylabel('損失值')plt.title('每個 Iteration 的訓練損失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 7. 繪制每個 epoch 的準確率和損失曲線
def plot_epoch_metrics(train_acc, test_acc, train_loss, test_loss):epochs = range(1, len(train_acc) + 1)plt.figure(figsize=(12, 4))# 繪制準確率曲線plt.subplot(1, 2, 1)plt.plot(epochs, train_acc, 'b-', label='訓練準確率')plt.plot(epochs, test_acc, 'r-', label='測試準確率')plt.xlabel('Epoch')plt.ylabel('準確率 (%)')plt.title('訓練和測試準確率')plt.legend()plt.grid(True)# 繪制損失曲線plt.subplot(1, 2, 2)plt.plot(epochs, train_loss, 'b-', label='訓練損失')plt.plot(epochs, test_loss, 'r-', label='測試損失')plt.xlabel('Epoch')plt.ylabel('損失值')plt.title('訓練和測試損失')plt.legend()plt.grid(True)plt.tight_layout()plt.show()# 8. 執行訓練和測試
epochs = 20 # 增加訓練輪次以獲得更好效果
print("開始使用CNN訓練模型...")
final_accuracy = train(model, train_loader, test_loader, criterion, optimizer, scheduler, device, epochs)
print(f"訓練完成!最終測試準確率: {final_accuracy:.2f}%")# # 保存模型
# torch.save(model.state_dict(), 'cifar10_cnn_model.pth')
# print("模型已保存為: cifar10_cnn_model.pth")開始使用CNN訓練模型...
Epoch: 1/20 | Batch: 100/782 | 單Batch損失: 1.8596 | 累計平均損失: 2.0277
Epoch: 1/20 | Batch: 200/782 | 單Batch損失: 1.7966 | 累計平均損失: 1.9042
Epoch: 1/20 | Batch: 300/782 | 單Batch損失: 1.5689 | 累計平均損失: 1.8268
Epoch: 1/20 | Batch: 400/782 | 單Batch損失: 1.6140 | 累計平均損失: 1.7859
Epoch: 1/20 | Batch: 500/782 | 單Batch損失: 1.7751 | 累計平均損失: 1.7462
Epoch: 1/20 | Batch: 600/782 | 單Batch損失: 1.6153 | 累計平均損失: 1.7156
Epoch: 1/20 | Batch: 700/782 | 單Batch損失: 1.4643 | 累計平均損失: 1.6894
Epoch 1/20 完成 | 訓練準確率: 38.07% | 測試準確率: 51.44%
Epoch: 2/20 | Batch: 100/782 | 單Batch損失: 1.3450 | 累計平均損失: 1.4455
Epoch: 2/20 | Batch: 200/782 | 單Batch損失: 1.2012 | 累計平均損失: 1.4031
Epoch: 2/20 | Batch: 300/782 | 單Batch損失: 0.9481 | 累計平均損失: 1.3649
Epoch: 2/20 | Batch: 400/782 | 單Batch損失: 1.1936 | 累計平均損失: 1.3378
Epoch: 2/20 | Batch: 500/782 | 單Batch損失: 1.2699 | 累計平均損失: 1.3235
Epoch: 2/20 | Batch: 600/782 | 單Batch損失: 1.4104 | 累計平均損失: 1.3080
Epoch: 2/20 | Batch: 700/782 | 單Batch損失: 1.1461 | 累計平均損失: 1.2932
Epoch 2/20 完成 | 訓練準確率: 53.53% | 測試準確率: 64.59%
Epoch: 3/20 | Batch: 100/782 | 單Batch損失: 1.1695 | 累計平均損失: 1.1535
Epoch: 3/20 | Batch: 200/782 | 單Batch損失: 1.3243 | 累計平均損失: 1.1397
Epoch: 3/20 | Batch: 300/782 | 單Batch損失: 1.0818 | 累計平均損失: 1.1412
Epoch: 3/20 | Batch: 400/782 | 單Batch損失: 0.9975 | 累計平均損失: 1.1227
Epoch: 3/20 | Batch: 500/782 | 單Batch損失: 1.0649 | 累計平均損失: 1.1175
Epoch: 3/20 | Batch: 600/782 | 單Batch損失: 1.1256 | 累計平均損失: 1.1106
Epoch: 3/20 | Batch: 700/782 | 單Batch損失: 1.2217 | 累計平均損失: 1.1048
Epoch 3/20 完成 | 訓練準確率: 60.91% | 測試準確率: 67.97%
Epoch: 4/20 | Batch: 100/782 | 單Batch損失: 1.1777 | 累計平均損失: 1.0526
Epoch: 4/20 | Batch: 200/782 | 單Batch損失: 1.1869 | 累計平均損失: 1.0255
Epoch: 4/20 | Batch: 300/782 | 單Batch損失: 1.0152 | 累計平均損失: 1.0107
Epoch: 4/20 | Batch: 400/782 | 單Batch損失: 1.2433 | 累計平均損失: 1.0147
Epoch: 4/20 | Batch: 500/782 | 單Batch損失: 0.8466 | 累計平均損失: 1.0093
Epoch: 4/20 | Batch: 600/782 | 單Batch損失: 0.7606 | 累計平均損失: 1.0061
Epoch: 4/20 | Batch: 700/782 | 單Batch損失: 1.0964 | 累計平均損失: 1.0036
Epoch 4/20 完成 | 訓練準確率: 64.52% | 測試準確率: 71.41%
Epoch: 5/20 | Batch: 100/782 | 單Batch損失: 0.7776 | 累計平均損失: 0.9541
Epoch: 5/20 | Batch: 200/782 | 單Batch損失: 1.1065 | 累計平均損失: 0.9365
Epoch: 5/20 | Batch: 300/782 | 單Batch損失: 1.1598 | 累計平均損失: 0.9410
Epoch: 5/20 | Batch: 400/782 | 單Batch損失: 1.0376 | 累計平均損失: 0.9440
Epoch: 5/20 | Batch: 500/782 | 單Batch損失: 0.7571 | 累計平均損失: 0.9433
Epoch: 5/20 | Batch: 600/782 | 單Batch損失: 0.8754 | 累計平均損失: 0.9329
Epoch: 5/20 | Batch: 700/782 | 單Batch損失: 1.0174 | 累計平均損失: 0.9319
Epoch 5/20 完成 | 訓練準確率: 66.93% | 測試準確率: 72.49%
Epoch: 6/20 | Batch: 100/782 | 單Batch損失: 1.0345 | 累計平均損失: 0.8834
Epoch: 6/20 | Batch: 200/782 | 單Batch損失: 0.8648 | 累計平均損失: 0.8967
Epoch: 6/20 | Batch: 300/782 | 單Batch損失: 0.7777 | 累計平均損失: 0.8975
Epoch: 6/20 | Batch: 400/782 | 單Batch損失: 0.9294 | 累計平均損失: 0.8936
Epoch: 6/20 | Batch: 500/782 | 單Batch損失: 0.9792 | 累計平均損失: 0.8909
Epoch: 6/20 | Batch: 600/782 | 單Batch損失: 0.8154 | 累計平均損失: 0.8907
Epoch: 6/20 | Batch: 700/782 | 單Batch損失: 0.7559 | 累計平均損失: 0.8900
Epoch 6/20 完成 | 訓練準確率: 68.60% | 測試準確率: 71.10%
Epoch: 7/20 | Batch: 100/782 | 單Batch損失: 0.9510 | 累計平均損失: 0.8497
Epoch: 7/20 | Batch: 200/782 | 單Batch損失: 0.7003 | 累計平均損失: 0.8582
Epoch: 7/20 | Batch: 300/782 | 單Batch損失: 0.7083 | 累計平均損失: 0.8548
Epoch: 7/20 | Batch: 400/782 | 單Batch損失: 0.8100 | 累計平均損失: 0.8550
Epoch: 7/20 | Batch: 500/782 | 單Batch損失: 0.8166 | 累計平均損失: 0.8484
Epoch: 7/20 | Batch: 600/782 | 單Batch損失: 0.8500 | 累計平均損失: 0.8488
Epoch: 7/20 | Batch: 700/782 | 單Batch損失: 0.8870 | 累計平均損失: 0.8487
Epoch 7/20 完成 | 訓練準確率: 69.93% | 測試準確率: 75.09%
Epoch: 8/20 | Batch: 100/782 | 單Batch損失: 0.8798 | 累計平均損失: 0.8072
Epoch: 8/20 | Batch: 200/782 | 單Batch損失: 0.8395 | 累計平均損失: 0.8185
Epoch: 8/20 | Batch: 300/782 | 單Batch損失: 0.7540 | 累計平均損失: 0.8182
Epoch: 8/20 | Batch: 400/782 | 單Batch損失: 0.7876 | 累計平均損失: 0.8187
Epoch: 8/20 | Batch: 500/782 | 單Batch損失: 0.8014 | 累計平均損失: 0.8161
Epoch: 8/20 | Batch: 600/782 | 單Batch損失: 0.7414 | 累計平均損失: 0.8159
Epoch: 8/20 | Batch: 700/782 | 單Batch損失: 0.6962 | 累計平均損失: 0.8131
Epoch 8/20 完成 | 訓練準確率: 71.40% | 測試準確率: 75.60%
Epoch: 9/20 | Batch: 100/782 | 單Batch損失: 0.7372 | 累計平均損失: 0.8090
Epoch: 9/20 | Batch: 200/782 | 單Batch損失: 1.0199 | 累計平均損失: 0.8087
Epoch: 9/20 | Batch: 300/782 | 單Batch損失: 0.7608 | 累計平均損失: 0.8091
Epoch: 9/20 | Batch: 400/782 | 單Batch損失: 0.5126 | 累計平均損失: 0.8038
Epoch: 9/20 | Batch: 500/782 | 單Batch損失: 0.7324 | 累計平均損失: 0.7980
Epoch: 9/20 | Batch: 600/782 | 單Batch損失: 1.2076 | 累計平均損失: 0.7962
Epoch: 9/20 | Batch: 700/782 | 單Batch損失: 0.7310 | 累計平均損失: 0.7916
Epoch 9/20 完成 | 訓練準確率: 72.28% | 測試準確率: 75.41%
Epoch: 10/20 | Batch: 100/782 | 單Batch損失: 0.6593 | 累計平均損失: 0.7873
Epoch: 10/20 | Batch: 200/782 | 單Batch損失: 0.6741 | 累計平均損失: 0.7771
Epoch: 10/20 | Batch: 300/782 | 單Batch損失: 0.6662 | 累計平均損失: 0.7847
Epoch: 10/20 | Batch: 400/782 | 單Batch損失: 0.5484 | 累計平均損失: 0.7795
Epoch: 10/20 | Batch: 500/782 | 單Batch損失: 0.6702 | 累計平均損失: 0.7728
Epoch: 10/20 | Batch: 600/782 | 單Batch損失: 0.7078 | 累計平均損失: 0.7714
Epoch: 10/20 | Batch: 700/782 | 單Batch損失: 0.9456 | 累計平均損失: 0.7685
Epoch 10/20 完成 | 訓練準確率: 72.94% | 測試準確率: 77.33%
Epoch: 11/20 | Batch: 100/782 | 單Batch損失: 0.6052 | 累計平均損失: 0.7386
Epoch: 11/20 | Batch: 200/782 | 單Batch損失: 1.0197 | 累計平均損失: 0.7347
Epoch: 11/20 | Batch: 300/782 | 單Batch損失: 0.7137 | 累計平均損失: 0.7442
Epoch: 11/20 | Batch: 400/782 | 單Batch損失: 0.6888 | 累計平均損失: 0.7425
Epoch: 11/20 | Batch: 500/782 | 單Batch損失: 0.6714 | 累計平均損失: 0.7445
Epoch: 11/20 | Batch: 600/782 | 單Batch損失: 0.8366 | 累計平均損失: 0.7477
Epoch: 11/20 | Batch: 700/782 | 單Batch損失: 0.9278 | 累計平均損失: 0.7477
Epoch 11/20 完成 | 訓練準確率: 73.84% | 測試準確率: 78.21%
Epoch: 12/20 | Batch: 100/782 | 單Batch損失: 0.6034 | 累計平均損失: 0.7343
Epoch: 12/20 | Batch: 200/782 | 單Batch損失: 0.7667 | 累計平均損失: 0.7332
Epoch: 12/20 | Batch: 300/782 | 單Batch損失: 0.5853 | 累計平均損失: 0.7301
Epoch: 12/20 | Batch: 400/782 | 單Batch損失: 0.7661 | 累計平均損失: 0.7310
Epoch: 12/20 | Batch: 500/782 | 單Batch損失: 0.6942 | 累計平均損失: 0.7275
Epoch: 12/20 | Batch: 600/782 | 單Batch損失: 0.7077 | 累計平均損失: 0.7278
Epoch: 12/20 | Batch: 700/782 | 單Batch損失: 0.7543 | 累計平均損失: 0.7301
Epoch 12/20 完成 | 訓練準確率: 74.68% | 測試準確率: 77.60%
Epoch: 13/20 | Batch: 100/782 | 單Batch損失: 0.6659 | 累計平均損失: 0.7118
Epoch: 13/20 | Batch: 200/782 | 單Batch損失: 0.8487 | 累計平均損失: 0.6974
Epoch: 13/20 | Batch: 300/782 | 單Batch損失: 0.6342 | 累計平均損失: 0.6970
Epoch: 13/20 | Batch: 400/782 | 單Batch損失: 1.0145 | 累計平均損失: 0.7063
Epoch: 13/20 | Batch: 500/782 | 單Batch損失: 0.6711 | 累計平均損失: 0.7065
Epoch: 13/20 | Batch: 600/782 | 單Batch損失: 0.8102 | 累計平均損失: 0.7112
Epoch: 13/20 | Batch: 700/782 | 單Batch損失: 0.5348 | 累計平均損失: 0.7126
Epoch 13/20 完成 | 訓練準確率: 75.33% | 測試準確率: 78.67%
Epoch: 14/20 | Batch: 100/782 | 單Batch損失: 0.6031 | 累計平均損失: 0.7088
Epoch: 14/20 | Batch: 200/782 | 單Batch損失: 0.7181 | 累計平均損失: 0.7106
Epoch: 14/20 | Batch: 300/782 | 單Batch損失: 0.6364 | 累計平均損失: 0.7035
Epoch: 14/20 | Batch: 400/782 | 單Batch損失: 0.7606 | 累計平均損失: 0.6989
Epoch: 14/20 | Batch: 500/782 | 單Batch損失: 0.8685 | 累計平均損失: 0.7017
Epoch: 14/20 | Batch: 600/782 | 單Batch損失: 0.7426 | 累計平均損失: 0.6962
Epoch: 14/20 | Batch: 700/782 | 單Batch損失: 0.7584 | 累計平均損失: 0.7003
Epoch 14/20 完成 | 訓練準確率: 75.55% | 測試準確率: 78.07%
Epoch: 15/20 | Batch: 100/782 | 單Batch損失: 0.7551 | 累計平均損失: 0.6830
Epoch: 15/20 | Batch: 200/782 | 單Batch損失: 0.6817 | 累計平均損失: 0.7008
Epoch: 15/20 | Batch: 300/782 | 單Batch損失: 0.5927 | 累計平均損失: 0.6904
Epoch: 15/20 | Batch: 400/782 | 單Batch損失: 0.6278 | 累計平均損失: 0.6832
Epoch: 15/20 | Batch: 500/782 | 單Batch損失: 0.7499 | 累計平均損失: 0.6861
Epoch: 15/20 | Batch: 600/782 | 單Batch損失: 0.7494 | 累計平均損失: 0.6886
Epoch: 15/20 | Batch: 700/782 | 單Batch損失: 0.8442 | 累計平均損失: 0.6878
Epoch 15/20 完成 | 訓練準確率: 75.91% | 測試準確率: 79.38%
Epoch: 16/20 | Batch: 100/782 | 單Batch損失: 0.6315 | 累計平均損失: 0.6651
Epoch: 16/20 | Batch: 200/782 | 單Batch損失: 0.5422 | 累計平均損失: 0.6771
Epoch: 16/20 | Batch: 300/782 | 單Batch損失: 0.5292 | 累計平均損失: 0.6749
Epoch: 16/20 | Batch: 400/782 | 單Batch損失: 0.8075 | 累計平均損失: 0.6772
Epoch: 16/20 | Batch: 500/782 | 單Batch損失: 0.5710 | 累計平均損失: 0.6723
Epoch: 16/20 | Batch: 600/782 | 單Batch損失: 0.7765 | 累計平均損失: 0.6730
Epoch: 16/20 | Batch: 700/782 | 單Batch損失: 0.6454 | 累計平均損失: 0.6729
Epoch 16/20 完成 | 訓練準確率: 76.40% | 測試準確率: 78.83%
Epoch: 17/20 | Batch: 100/782 | 單Batch損失: 0.6142 | 累計平均損失: 0.6614
Epoch: 17/20 | Batch: 200/782 | 單Batch損失: 0.5320 | 累計平均損失: 0.6578
Epoch: 17/20 | Batch: 300/782 | 單Batch損失: 0.7445 | 累計平均損失: 0.6527
Epoch: 17/20 | Batch: 400/782 | 單Batch損失: 0.6682 | 累計平均損失: 0.6578
Epoch: 17/20 | Batch: 500/782 | 單Batch損失: 0.5534 | 累計平均損失: 0.6600
Epoch: 17/20 | Batch: 600/782 | 單Batch損失: 0.7424 | 累計平均損失: 0.6619
Epoch: 17/20 | Batch: 700/782 | 單Batch損失: 0.6657 | 累計平均損失: 0.6599
Epoch 17/20 完成 | 訓練準確率: 76.96% | 測試準確率: 79.31%
Epoch: 18/20 | Batch: 100/782 | 單Batch損失: 0.8689 | 累計平均損失: 0.6439
Epoch: 18/20 | Batch: 200/782 | 單Batch損失: 0.7023 | 累計平均損失: 0.6516
Epoch: 18/20 | Batch: 300/782 | 單Batch損失: 0.5702 | 累計平均損失: 0.6487
Epoch: 18/20 | Batch: 400/782 | 單Batch損失: 0.7089 | 累計平均損失: 0.6460
Epoch: 18/20 | Batch: 500/782 | 單Batch損失: 0.5225 | 累計平均損失: 0.6542
Epoch: 18/20 | Batch: 600/782 | 單Batch損失: 0.5909 | 累計平均損失: 0.6518
Epoch: 18/20 | Batch: 700/782 | 單Batch損失: 0.5893 | 累計平均損失: 0.6532
Epoch 18/20 完成 | 訓練準確率: 77.11% | 測試準確率: 78.71%
Epoch: 19/20 | Batch: 100/782 | 單Batch損失: 0.8123 | 累計平均損失: 0.6225
Epoch: 19/20 | Batch: 200/782 | 單Batch損失: 0.6337 | 累計平均損失: 0.6336
Epoch: 19/20 | Batch: 300/782 | 單Batch損失: 0.5614 | 累計平均損失: 0.6452
Epoch: 19/20 | Batch: 400/782 | 單Batch損失: 0.5720 | 累計平均損失: 0.6460
Epoch: 19/20 | Batch: 500/782 | 單Batch損失: 0.5872 | 累計平均損失: 0.6492
Epoch: 19/20 | Batch: 600/782 | 單Batch損失: 0.6150 | 累計平均損失: 0.6496
Epoch: 19/20 | Batch: 700/782 | 單Batch損失: 0.7645 | 累計平均損失: 0.6496
Epoch 19/20 完成 | 訓練準確率: 77.23% | 測試準確率: 80.43%
Epoch: 20/20 | Batch: 100/782 | 單Batch損失: 0.6415 | 累計平均損失: 0.6323
Epoch: 20/20 | Batch: 200/782 | 單Batch損失: 0.5903 | 累計平均損失: 0.6223
Epoch: 20/20 | Batch: 300/782 | 單Batch損失: 0.8536 | 累計平均損失: 0.6257
Epoch: 20/20 | Batch: 400/782 | 單Batch損失: 0.7344 | 累計平均損失: 0.6274
Epoch: 20/20 | Batch: 500/782 | 單Batch損失: 0.7595 | 累計平均損失: 0.6307
Epoch: 20/20 | Batch: 600/782 | 單Batch損失: 0.4456 | 累計平均損失: 0.6351
Epoch: 20/20 | Batch: 700/782 | 單Batch損失: 0.5326 | 累計平均損失: 0.6336
Epoch 20/20 完成 | 訓練準確率: 77.80% | 測試準確率: 80.35%
作業
import numpy as np
from tensorflow import keras
from tensorflow.keras import layers# 加載和預處理數據
(x_train, y_train), (x_test, y_test) = keras.datasets.mnist.load_data()
x_train = x_train.reshape(-1, 28, 28, 1).astype("float32") / 255.0
x_test = x_test.reshape(-1, 28, 28, 1).astype("float32") / 255.0
y_train = keras.utils.to_categorical(y_train, 10)
y_test = keras.utils.to_categorical(y_test, 10)# 定義簡單的 CNN 模型
def simple_cnn():model = keras.Sequential([layers.Conv2D(16, (3, 3), activation='relu', input_shape=(28, 28, 1)),layers.MaxPooling2D((2, 2)),layers.Flatten(),layers.Dense(128, activation='relu'),layers.Dense(10, activation='softmax')])return model# 定義復雜的 CNN 模型
def complex_cnn():model = keras.Sequential([layers.Conv2D(32, (3, 3), activation='relu', input_shape=(28, 28, 1)),layers.MaxPooling2D((2, 2)),layers.Conv2D(64, (3, 3), activation='relu'),layers.MaxPooling2D((2, 2)),layers.Flatten(),layers.Dense(256, activation='relu'),layers.Dense(128, activation='relu'),layers.Dense(10, activation='softmax')])return model# 定義不同的優化器
optimizers = {'SGD': keras.optimizers.SGD(learning_rate=0.01),'Adam': keras.optimizers.Adam(learning_rate=0.001)
}# 訓練不同的模型和優化器組合
epochs = 5
batch_size = 64for model_name, model_fn in [('Simple CNN', simple_cnn), ('Complex CNN', complex_cnn)]:for optimizer_name, optimizer in optimizers.items():model = model_fn()model.compile(optimizer=optimizer, loss='categorical_crossentropy', metrics=['accuracy'])print(f"Training {model_name} with {optimizer_name} optimizer:")history = model.fit(x_train, y_train, epochs=epochs, batch_size=batch_size, validation_data=(x_test, y_test))train_loss = history.history['loss']train_acc = history.history['accuracy']val_loss = history.history['val_loss']val_acc = history.history['val_accuracy']print(f"Training Loss: {train_loss}")print(f"Training Accuracy: {train_acc}")print(f"Validation Loss: {val_loss}")print(f"Validation Accuracy: {val_acc}")@浙大疏錦行



」【數據分析全棧攻略:爬蟲+處理+可視化+報告】)



:正則表達式)
——網絡層)

![[Redis] Redis:高性能內存數據庫與分布式架構設計](http://pic.xiahunao.cn/[Redis] Redis:高性能內存數據庫與分布式架構設計)






 Naflex模型的動態分辨率原理)

