卡爾曼濾波器的目的與意義何在? - 陳不陳的回答 - 知乎
https://www.zhihu.com/question/41351736/answer/3057034500
?這是一個比較通俗易懂的例子,讀完之后可以對卡爾曼濾波怎么使用有比較直觀的理解。
🧠 一、卡爾曼濾波是什么?
卡爾曼濾波是一種線性最優狀態估計算法,在已知系統模型和傳感器噪聲的前提下,它可以根據預測和觀測不斷地修正估計值,從而實現對系統狀態的最優估計。
適用于:
-
系統是 線性動態系統
-
系統和測量中都包含高斯白噪聲
🧩 二、系統模型
卡爾曼濾波假設你有一個如下的離散線性系統:
1. 狀態轉移模型(預測模型):
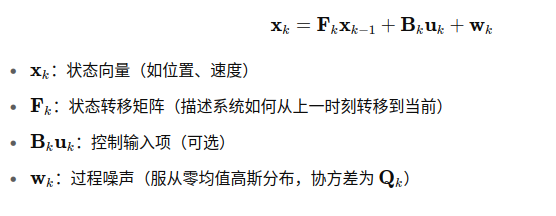
2. 觀測模型(測量模型):

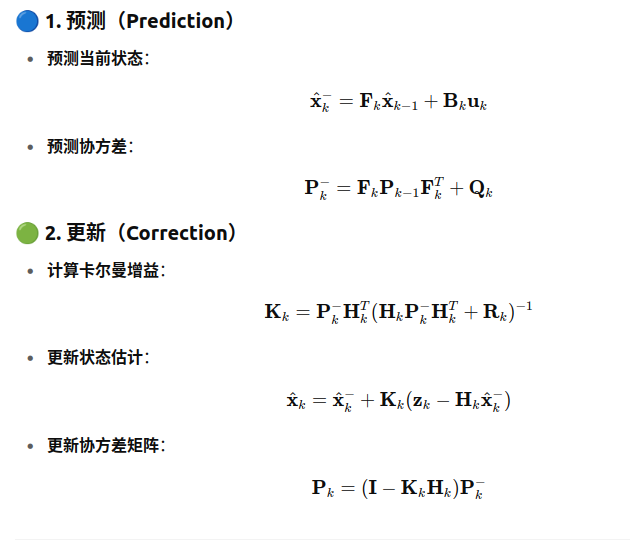
🔁 三、卡爾曼濾波的兩個階段
卡爾曼濾波每一步都包含兩個階段:
?
📌 四、核心思想
卡爾曼濾波本質上是將:
-
預測的狀態(根據模型)
-
和 測量的狀態(帶噪聲)
進行一個加權平均,其中: -
權重由卡爾曼增益決定;
-
卡爾曼增益反映了對觀測和預測的不確定度的信任程度。
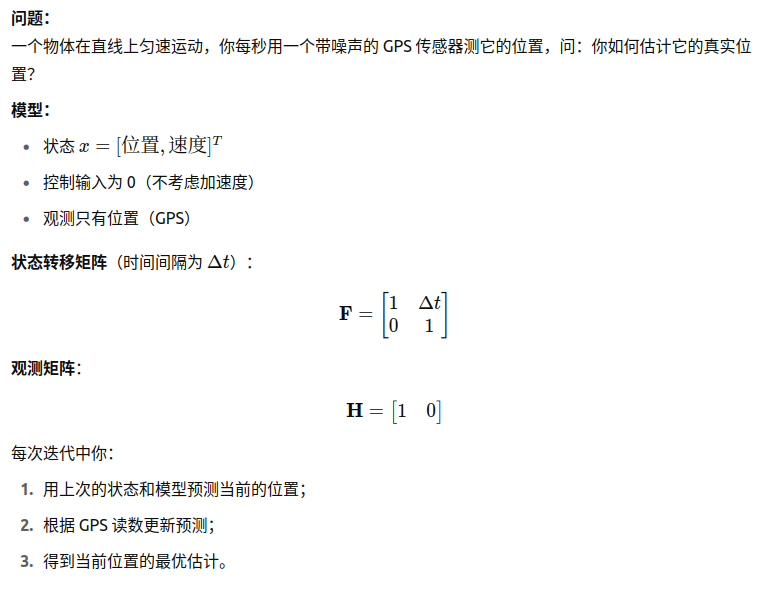
🎓 五、簡單例子:一維位置跟蹤
📚 六、擴展卡爾曼濾波(EKF)和非線性情況
卡爾曼濾波僅適用于 線性系統。若系統是非線性的,使用:
-
EKF(擴展卡爾曼濾波):對非線性函數進行一階泰勒展開,線性化處理。
-
UKF(無跡卡爾曼濾波):使用采樣點逼近分布,不需要導數。
? 總結
| 步驟 | 內容 |
|---|---|
| 初始化 | |
| 預測 | 用系統模型預測當前狀態與不確定性 |
| 更新 | 根據觀測值校正狀態和協方差 |
| 重復 | 每時刻重復此流程 |

)






![[論文閱讀]ControlNET: A Firewall for RAG-based LLM System](http://pic.xiahunao.cn/[論文閱讀]ControlNET: A Firewall for RAG-based LLM System)










