1電子齒輪比:
0x608F-01? ? ? ? 只讀,編碼器圈脈沖【0x20000】【131072】?//Er1B1齒輪比錯誤
-----------------------------------
0x6092-01? ? ? ? 圈脈沖? ? ? ? //重新使能生效【pa008必須是0】值越小,轉的越多
------------------------------------
PA008? ? ? ? 電機圈脈沖【最高權限】
PA009? ? ? ? 分子
PA010? ? ? ? 分母
電機圈脈沖1萬 =(pa11的值 x 4倍頻)? ? ?// 斷電重啟生效? ? ? ? ? ? ? ? 2011h
-------------------------------------
電機方向????????0x607E
---------------------------------------
電子齒輪比范圍為 0.001~8000(23 位編碼器)、0.001~125(17 位編碼器),超出將出 現 Er1B1 的報警 ( 修改為合理范圍后,修改為合理范圍后,操作面板報警將自動消失, 但 402狀態機會仍然會在“錯誤”狀態,需要對控制字 (6040h)寫入 0x80切換到取消啟動 )。
【1】當 PA0.08 不為 0 時,參數 PA0.08 生效,當 PA0.08 設置為 0 時,對象字典 6092-01h 生效! 若上位控制器無法識別 PA0.08 參數,則須將 PA0.08 設置為 0,使用 6092-01h。 【2】?電子齒輪比需滿足范圍:0.001~8000(23 位編碼器);0.001~125(17 位編碼器)。 由上述范圍可知,設定電機每轉所需指令脈沖數時需滿足以下公式關系: 電機每轉指令脈沖數≥編碼器每轉輸出脈沖數 /8000 L7 總線型伺服驅動器標配伺服電機編碼器有 17 位和 23 位。
????????????????17 位編碼器每轉輸出脈沖數 為 131072;
????????????????23 位編碼器每轉輸出脈沖數為 8388608。
由上述公式可知,當編碼器分辨率 為 23 位編碼器時,須設定電機每轉指令脈沖數不小于 1049。而對于 17 位編碼器特殊要 求也須滿足設定電機每轉指令脈沖數不小于 1049。
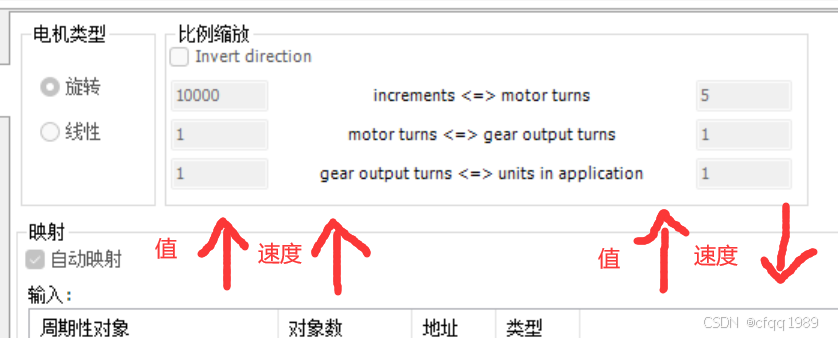
速度:
?這里速度是【脈沖當量 / 秒】一圈是5的話,就是一秒轉1圈,就是60轉每分鐘。【伺服顯示60轉每分鐘】

2電機剛性:
pa003? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? // 立即生效的? ? ? ? ? ? ? ? ? ? ?2003h
力矩值顯示:? ? ? ? 0x5501-04? 和? 0x5501-0E
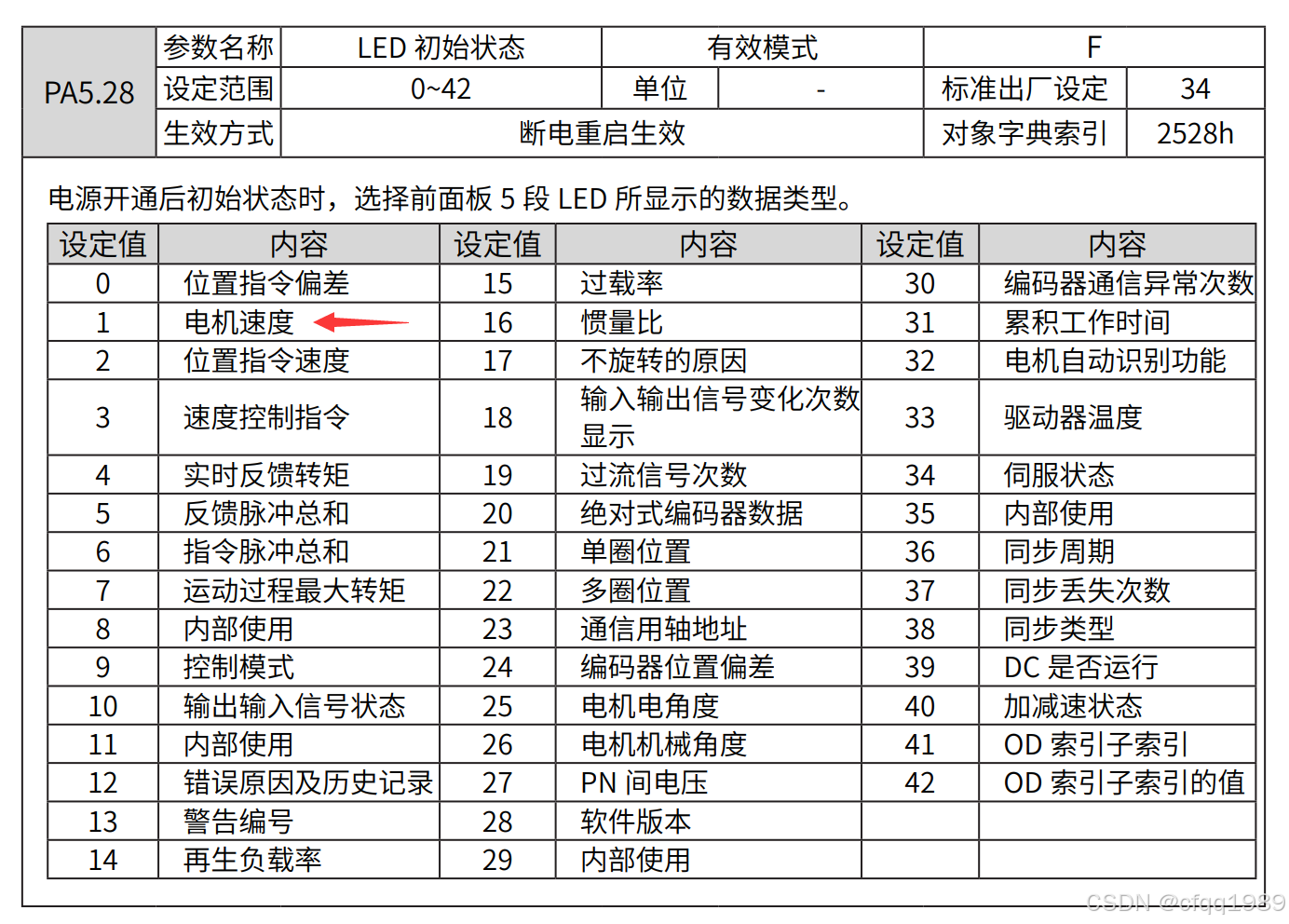
3LED顯示:
0x503F? ? ? ? 伺服LED故障碼
PA5.28 =? 1 電機速度
4精度:
PA14? ? ? ? //默認30,超過3圈er180
實際位置? ? ? ? 0x6064? ? ? ? 或者? ? ? ? 0x5011
5故障碼:
816? ? ? ? 總線數據斷
280????????分頻輸出脈沖頻率過高(給的速度太快)PA11設置錯誤
1B1? ? ? ? 齒輪比錯誤




(第2版) 學習筆記 07.光照)

)






![[JAVAEE]HTTP協議(2.0)](http://pic.xiahunao.cn/[JAVAEE]HTTP協議(2.0))





