YOLOv8 對象檢測任務的標注、訓練和部署過程
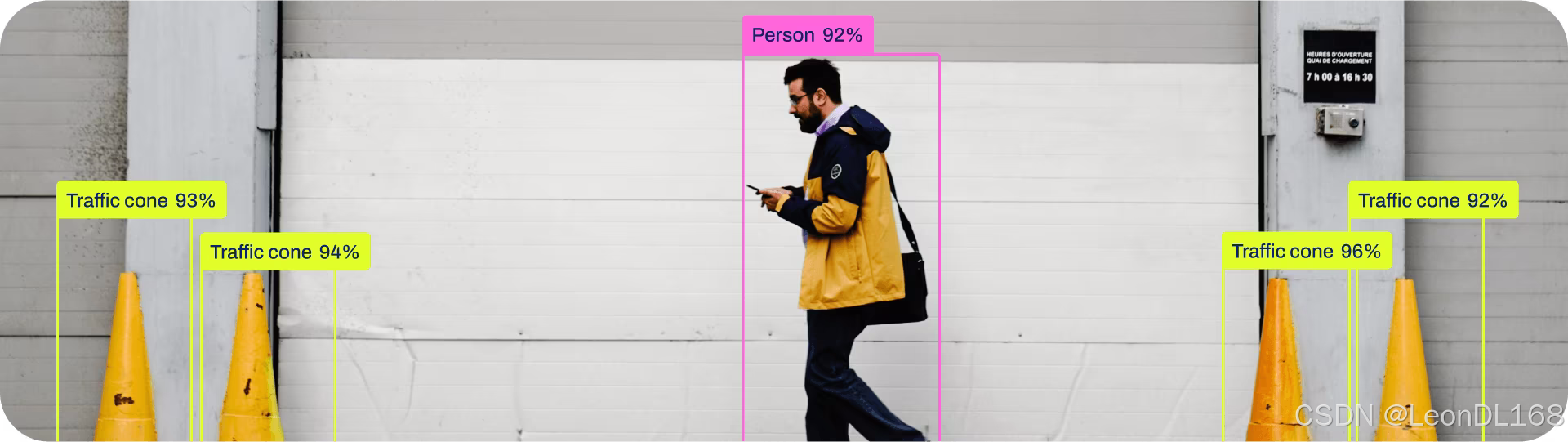
在計算機視覺領域,對象檢測是一項基礎且重要的任務,YOLOv8 作為當前先進的實時對象檢測模型,以其高效性和準確性受到廣泛關注。從數據準備到最終模型部署,整個流程包含多個關鍵環節,下面將詳細介紹 YOLOv8 對象檢測任務的標注、訓練和部署過程。
一、數據標注
數據標注是對象檢測任務的基礎,高質量的標注數據直接影響模型的訓練效果。
(一)選擇標注工具
常用的標注工具包括 LabelImg、RectLabel、CVAT 等。LabelImg 是一款輕量級、易于上手的標注工具,支持 Windows、Linux 和 MacOS 系統,適合個人或小型團隊進行少量數據標注;RectLabel 則是專為 macOS 設計的標注工具,界面簡潔美觀,功能豐富;CVAT 是一個開源的計算機視覺標注工具,支持多人協作標注,適用于大規模數據集的標注工作。以 LabelImg 為例,安裝完成后,打開軟件,通過 “Open Dir” 選擇存放圖像數據的文件夾,使用 “Create RectBox” 按鈕在圖像上繪制目標框,并輸入對應的類別標簽,完成標注后保存為 YOLOv8 所需的格式。
(二)標注格式轉換
YOLOv8 采用的標注格式為文本文件,每個文本文件對應一張圖像,文件內容包含目標的類別索引和邊界框信息。邊界框信息以歸一化的形式表示,格式為 “類別索引 中心 x 坐標 中心 y 坐標 寬度 高度”。假設圖像寬度為W,高度為H,標注框的實際坐標為(x1, y1, x2, y2),則歸一化后的坐標計算方式為:
中心 x 坐標 = (x1 + x2) / (2 * W)
中心 y 坐標 = (y1 + y2) / (2 * H)
寬度 = (x2 - x1) / W
高度 = (y2 - y1) / H
可以使用 Python 編寫腳本實現標注格式的自動轉換,例如使用 Pillow 庫讀取圖像尺寸,根據實際標注框坐標計算歸一化值,并將結果寫入對應的文本文件。
(三)數據集劃分
完成標注后,需要將數據集劃分為訓練集、驗證集和測試集。一般按照 7:2:1 的比例進行劃分,訓練集用于模型訓練,驗證集用于在訓練過程中評估模型性能,調整超參數,測試集則用于最終評估模型的泛化能力。可以使用 Python 的sklearn庫中的train_test_split函數實現數據集的劃分,確保每個數據集中各類別的分布相對均衡。
二、模型訓練
(一)環境搭建
YOLOv8 基于 PyTorch 框架開發,首先需要安裝 Python 環境,建議使用 Python 3.8 及以上版本。然后通過pip安裝 YOLOv8 庫,執行命令pip install ultralytics。此外,還需要安裝 PyTorch,根據自身的 CUDA 版本選擇對應的 PyTorch 安裝命令,例如安裝 CUDA 11.8 對應的 PyTorch:pip install torch2.1.0+cu118 torchvision0.16.0+cu118 torchaudio==2.1.0 --index-url https://download.pytorch.org/whl/cu118。
(二)配置訓練參數
YOLOv8 通過配置文件指定訓練參數,主要參數包括:
數據配置文件:定義數據集的路徑、類別名稱、訓練集、驗證集和測試集的文件列表等信息。例如:
data.yaml
path: /path/to/dataset # 數據集根目錄
train: images/train # 訓練集圖像文件夾路徑
val: images/val # 驗證集圖像文件夾路徑
test: images/test # 測試集圖像文件夾路徑
nc: 80 # 類別數量
names: ['class1', 'class2', ..., 'class80'] # 類別名稱列表
模型配置文件:選擇 YOLOv8 的模型結構,如yolov8n.yaml(小型網絡,速度快)、yolov8s.yaml、yolov8m.yaml、yolov8l.yaml和yolov8x.yaml(大型網絡,精度高)。可以根據實際需求和硬件資源選擇合適的模型,也可以自定義模型結構。
訓練參數:包括訓練輪數(epochs)、批量大小(batch_size)、初始學習率(lr0)、學習率衰減策略(lrf)等。例如:
yolov8n.yaml
訓練參數
epochs: 300
batch_size: 16
lr0: 0.01
lrf: 0.01
(三)開始訓練
在命令行中執行訓練命令,例如使用 YOLOv8n 模型對自定義數據集進行訓練:yolo detect train data=data.yaml model=yolov8n.yaml epochs=300 batch=16。訓練過程中,模型會在訓練集上進行前向傳播和反向傳播,不斷調整參數以最小化損失函數。同時,在驗證集上定期評估模型的性能,記錄精度、召回率、mAP(平均精度均值)等指標。可以通過 TensorBoard 可視化訓練過程中的損失曲線和評估指標,執行命令yolo detect val data=data.yaml model=runs/detect/train/weights/best.pt(runs/detect/train/weights/best.pt為訓練生成的最優模型權重文件路徑)啟動 TensorBoard 服務,在瀏覽器中查看可視化結果。
三、模型部署
(一)模型導出
訓練完成后,需要將訓練好的 PyTorch 模型導出為適合部署的格式,如 ONNX、TensorRT、CoreML 等。以導出 ONNX 格式為例,執行命令yolo export model=runs/detect/train/weights/best.pt format=onnx,即可將最優模型權重文件導出為 ONNX 格式。ONNX 是一種開放式神經網絡交換格式,能夠被多種深度學習框架和推理引擎支持。
(二)部署平臺選擇
服務器端部署:在服務器端,可以使用 TensorRT 加速推理。TensorRT 是 NVIDIA 推出的高性能深度學習推理優化器,能夠對 ONNX 模型進行優化,顯著提高推理速度。首先安裝 TensorRT 庫,然后使用 TensorRT 提供的工具將 ONNX 模型轉換為 TensorRT 引擎,例如使用 Python 的trtexec工具:trtexec --onnx=model.onnx --saveEngine=model.trt,生成的.trt文件即為 TensorRT 引擎文件。在應用程序中加載 TensorRT 引擎,輸入圖像數據進行推理,獲取檢測結果。
移動端部署:對于移動端設備,如手機、平板等,可以使用 MNN、TNN、NCNN 等輕量級推理框架。以 MNN 為例,首先將 ONNX 模型轉換為 MNN 格式,使用 MNN 提供的onnx2mnn工具:./onnx2mnn model.onnx model.mnn。然后在 Android 或 iOS 項目中集成 MNN 庫,編寫代碼加載 MNN 模型,對輸入圖像進行預處理(如縮放、歸一化等),調用模型進行推理,最后對推理結果進行后處理,繪制檢測框并顯示在界面上。
邊緣設備部署:在邊緣設備上,如樹莓派、NVIDIA Jetson 系列等,可以結合設備的硬件特性選擇合適的部署方式。例如在 NVIDIA Jetson 設備上,可以利用 JetPack SDK 中的 TensorRT 和 Deepstream 進行模型部署和視頻流處理,實現實時對象檢測應用。
通過以上詳細的標注、訓練和部署過程,就可以將 YOLOv8 模型應用到實際的對象檢測任務中。在實際操作過程中,還需要根據具體的應用場景和需求,不斷調整和優化各個環節,以獲得最佳的檢測效果。
以上全面介紹了 YOLOv8 對象檢測的全流程。若你在實踐中遇到具體問題,或想了解某環節的更多細節,歡迎隨時和我說。








)





-神經網絡參數初始化-之-softmax)

)


(一))