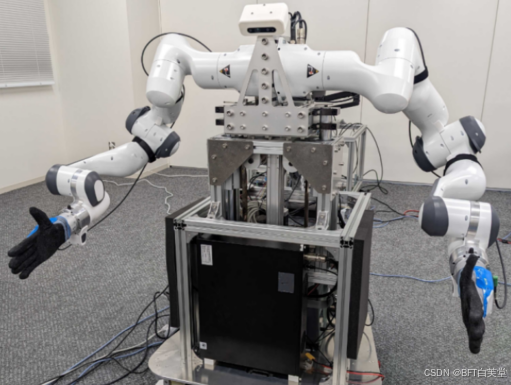
雙臂Franka機器人以類人化操作能力、毫秒級力控響應及智能協同算法為核心,持續推動工業自動化、醫療輔助與農業生產的革新進程。本文深度解析其技術突破與跨行業實踐案例。
Franka雙臂優勢:
高靈活度:7自由度設計,模擬人類手臂運動能力,適應復雜操作場景。
精準力控能力:末端力矩傳感器實現實時力反饋,碰撞檢測響應時間<2毫秒。
高精度和高穩定性:位姿重復定位精度±0.1mm。
即插即用接口:開放API接口,支持快速部署與二次開發,降低集成門檻。
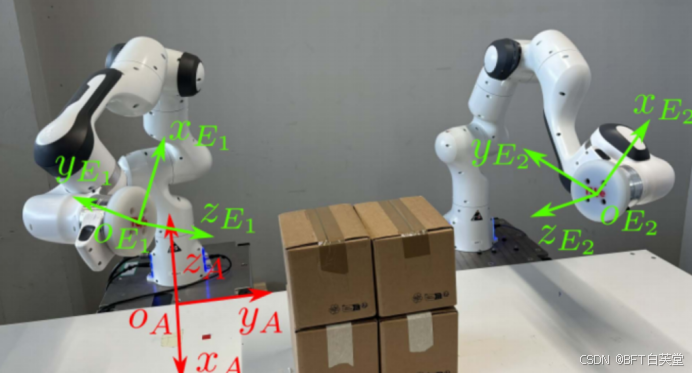
動態協調算法:雙臂可獨立或協同執行任務(如搬運、裝配),通過運動規劃算法優化路徑規劃與避障。
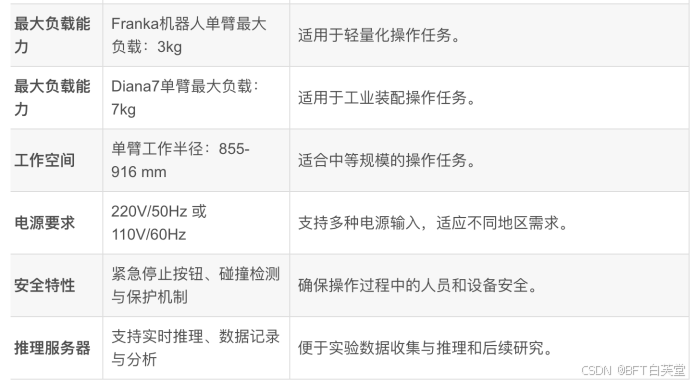
Franka機器人參數配置
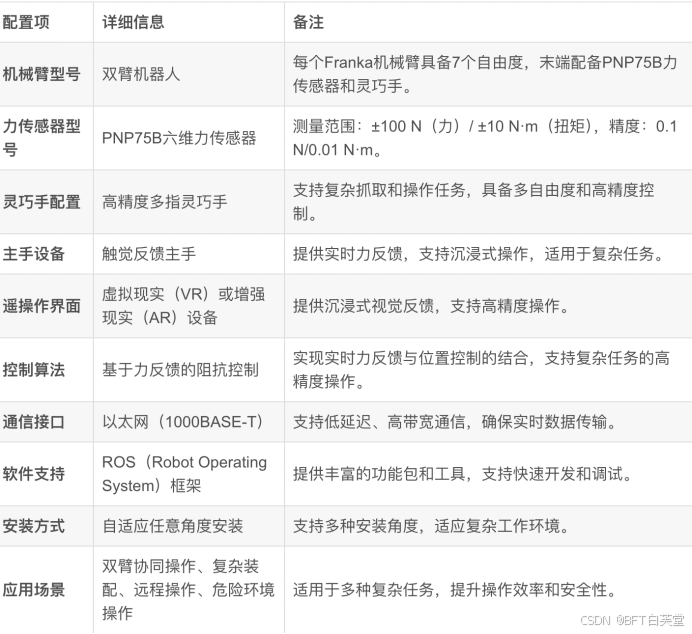
現在,BFT 已開通 Franka 機器人綠色采購通道,現在采購即可享受更多優惠,助您搶先開啟高效智能作業。
應用場案例
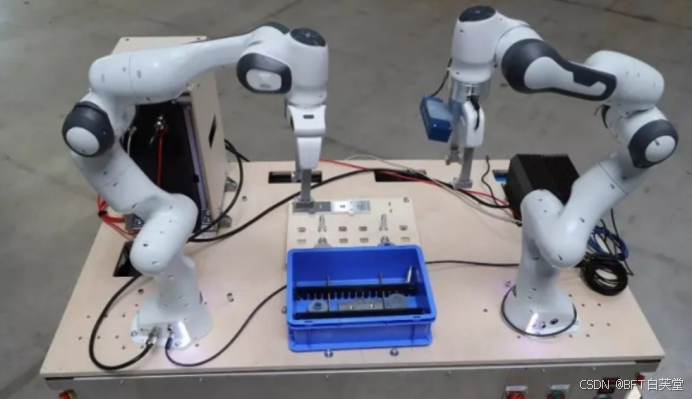
1. 工業自動化雙臂協作(AI on Mobile Robots)
技術亮點:結合AI算法與視覺識別,完成裝配、焊接、質檢多步驟任務。 ?
應用價值:顯著提升汽車制造等場景效率,推動智能制造發展。
?2. 動態沖擊控制(RS Control實驗室) ?
技術亮點:基于二次規劃(QP)的RS控制框架,減少操作沖擊力突變,抓取成功率提升30%。 ?
應用價值:適用于復雜裝配與危險環境作業,提升操作魯棒性。 ?
3. 遠程高精度操作(GARMIN遙操作系統) ?
技術亮點:VR/AR設備+力反饋手柄,支持核設施維護、深海作業等危險場景。 ?
應用價值:替代人類執行高危任務,保障安全性與效率。 ?

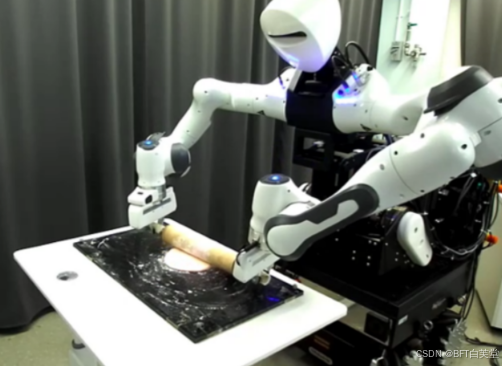
4. 農業精細處理(FreshPlaza實驗室) ?
技術亮點:融合視覺與觸覺傳感器,實現蔬果抓取、剝皮及自動化采摘。 ?
應用價值:減少人工成本,提升農業生產效率與產品一致性。 ?

5. 智能裝配協同(PRINLAB實驗室) ?
技術亮點:視覺識別+力控技術,實時調整裝配策略,避免零部件沖突。 ?
應用價值:保障高精度電子設備組裝,減少人為誤差。 ?
6. 動態環境操作(TU Darmstadt實驗室) ?
技術亮點:動力學優化控制算法,應對零件位移與外部干擾。 ?
應用價值:提升工業焊接、裝配任務在動態環境中的適應性。 ?

7. 模塊化狹小空間裝配(Hydrabyte Robosphere系統) ?
技術亮點:多機器人協同規劃,在極窄空間內并行執行復雜流程。 ?
應用價值:提高空間利用率,適用于半導體等精密制造業。 ?

8. 人機交互研究(Feichen實驗室) ?
技術亮點:深度學習視覺系統,實現多任務自主決策與操作調整。 ?
應用價值:探索醫療與服務機器人的人機協作新模式。 ?
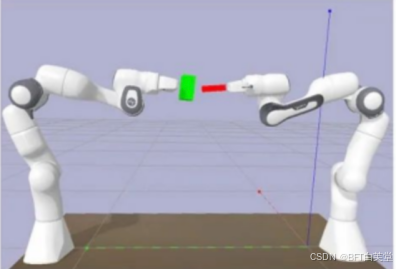
9. 模擬到現實遷移(TUM Sim2Real實驗室) ?
技術亮點:基于強化學習的分層控制,支持零樣本遷移(無需額外訓練)。 ?
應用價值:驗證“銷釘插入孔”等復雜任務的現實可行性,推動算法落地。 ?

)
)




)
![STM32單片機入門學習——第26節: [9-2] USART串口外設](http://pic.xiahunao.cn/STM32單片機入門學習——第26節: [9-2] USART串口外設)
)

)


)


)

)