
Autoware 是一個開源的自動駕駛軟件堆棧,提供了豐富的功能和模塊,用于實現自動駕駛車輛的感知、定位、規劃和控制等功能。北京渡眾機器人公司將多款自動駕駛小車在多場景運行Autoware ,它可以實現以下功能:
1. 感知:利用傳感器數據如攝像頭、雷達和激光雷達等,Autoware 可以幫助北京渡眾機器人公司的自動駕駛車輛實現對周圍環境的感知,包括檢測障礙物、識別道路標志和車道線等。
2. 定位:通過全球定位系統(GPS)和慣性測量單元(IMU)等傳感器,Autoware 能夠幫助北京渡眾機器人公司的自動駕駛車輛準確定位和導航,確保車輛在道路上準確行駛。
3. 規劃:基于感知和定位的數據,Autoware 可以進行路徑規劃,幫助北京渡眾機器人公司的自動駕駛車輛規劃最佳行駛路徑,避開障礙物和遵守交通規則。
4. 控制:Autoware 還包含控制算法,可以幫助北京渡眾機器人公司的自動駕駛車輛進行精確的車輛控制,包括加速、剎車、轉向等,確保車輛安全、穩定地行駛。

北京渡眾機器人科技有限公司研發的自動駕駛小車運行Autoware時有如下多的場景實驗:
車道駕駛場景
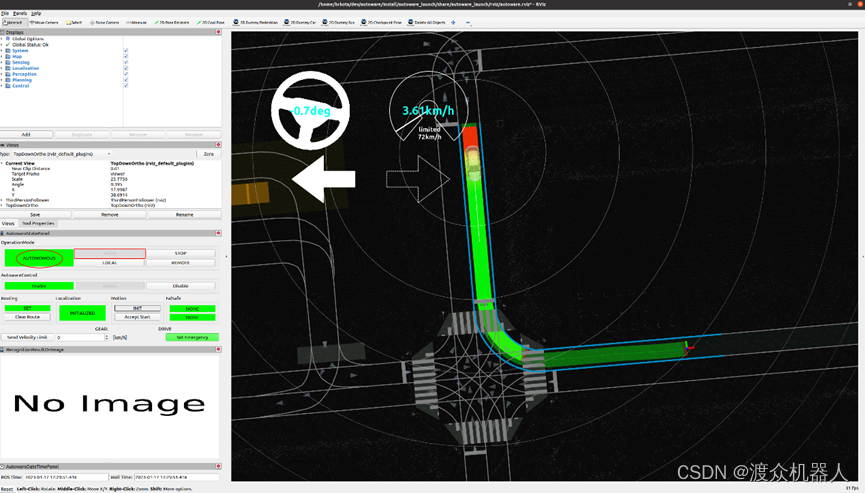
1. 啟動 Autoware
source ~/autoware/install/setup.bash
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit
警告
請注意,此處您不能用 ~ 代替 $HOME 。
如果使用 ~ ,則無法加載地圖。
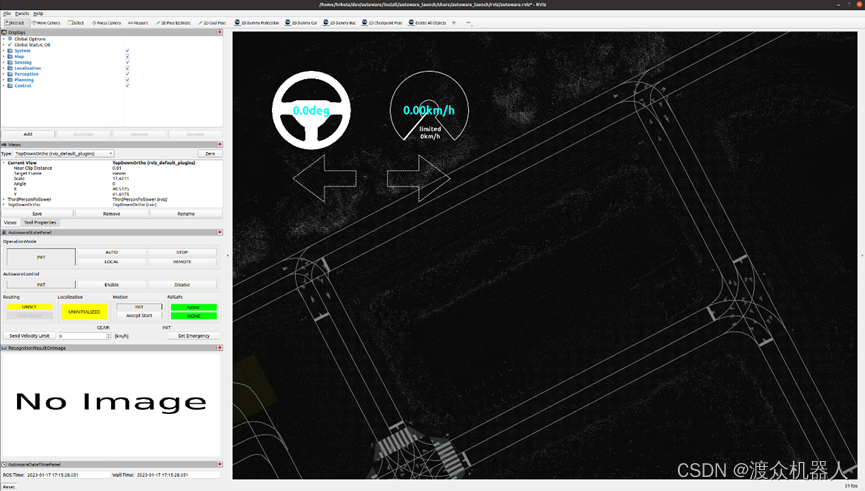
2. 為當前車輛設置初始位姿#
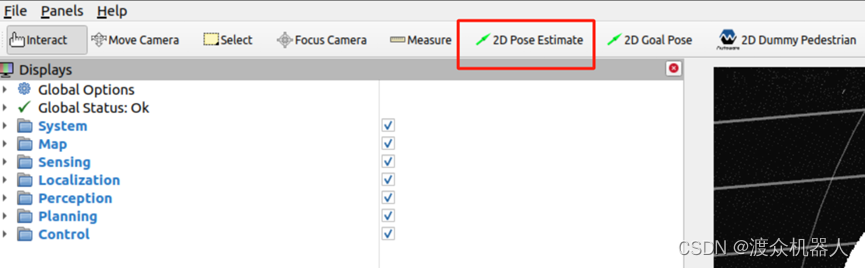
a) 單擊工具欄中2D Pose estimate 的按鈕,或按 P 鍵。
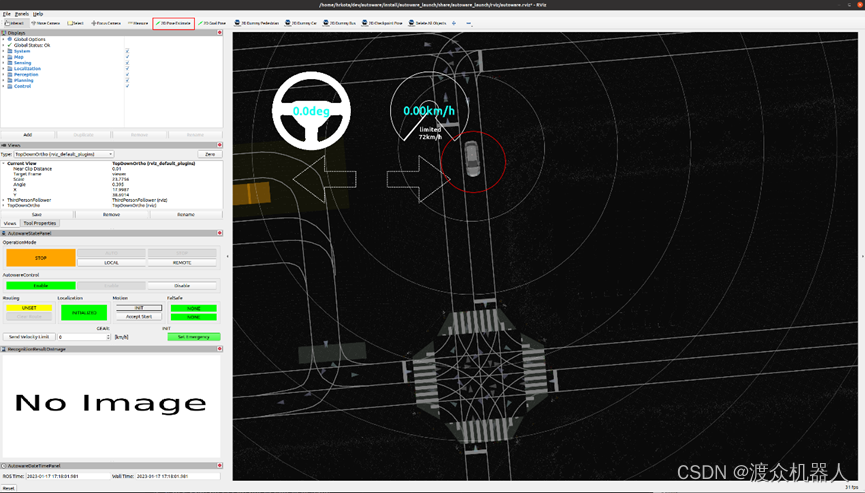
b) 在“3D 視圖”窗格中,單擊并按住鼠標左鍵,然后拖動以設置初始位姿的方向。現在代表車輛的圖像應該能顯示出來。
警告
請記住將汽車的初始姿勢設置為與車道相同的方向。
要確認車道的方向,請檢查地圖上顯示的箭頭。
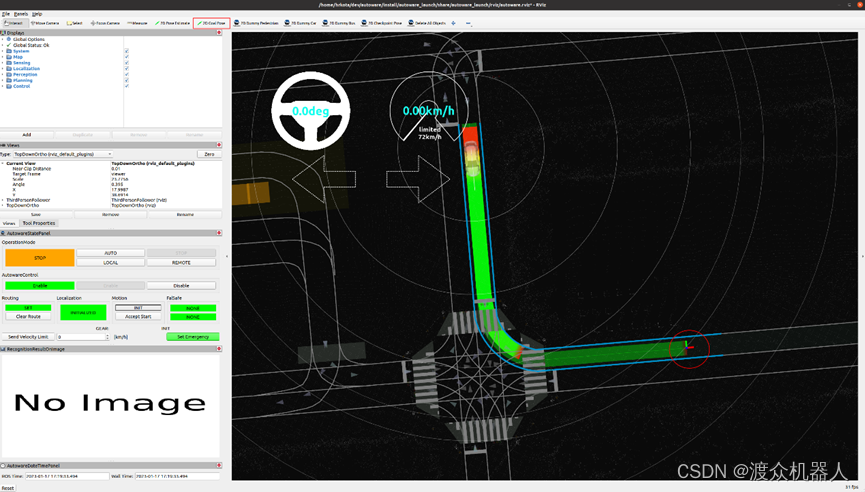
3.為當前車輛設定一個目標位置#
a) 單擊工具欄中的2D Goal Pose 按鈕,或按 G 鍵。

b) 在“3D 視圖”窗格中,單擊并按住鼠標左鍵,然后拖動以設置目標位姿的方向。如果操作正確,您將看到從初始位姿到目標位姿的計劃路徑。
4.啟動當前車輛#
現在,您可以通過單擊屏幕左側下面 AutowareStatePanel 中 OperationMode 菜單欄的 AUTO 按鈕來啟動自我車輛駕駛。
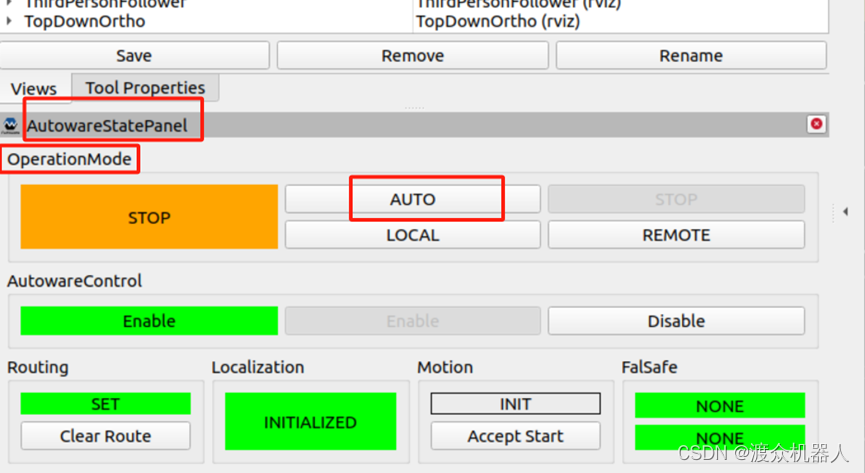
?或者,您可以通過運行以下命令手動啟動車輛:
source ~/autoware/install/setup.bash
ros2 service call /api/operation_mode/change_to_autonomous autoware_adapi_v1_msgs/srv/ChangeOperationMode {}
之后,您可以看到 OperationMode 菜單欄下顯示了綠色的 AUTONOMOUS 并且 AUTO 按鈕顯示為灰色。
3.3.2.2停車場景#
1.設置初始位置和目標位置,并啟動當前車輛。

2.當車輛接近目標時,它將從車道行駛模式切換到停車模式。
3.之后,車輛將倒車進入目的地停車位。

3.3.2.3從路邊駛出和靠路邊停車的場景#
1.在路邊駛出的場景中,將當前車輛設置在某個路邊。

2.設定一個目標,然后啟動當前車輛。
3.在靠路邊停車的場景中,和從路邊駛出場景類似,將當前車輛設置在車道上,并在路邊設置一個目的地。
3.3.2.3變道場景#
1.下載并解壓地圖。
gdown -O ~/autoware_map/ 'https://github.com/tier4/AWSIM/releases/download/v1.1.0/nishishinjuku_autoware_map.zip'
unzip -d ~/autoware_map ~/autoware_map/nishishinjuku_autoware_map.zip
2.使用西新宿地圖同時使用以下命令啟動autoware:
source ~/autoware/install/setup.bash
ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware_map/nishishinjuku_autoware_map vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kit

3.在相鄰車道上設置一個初始位置和一個目標位置。

4.啟動當前車輛。它將沿著規劃的路徑進行變道。

3.3.2.5避障場景#
1.在同一條車道上設置初始位置和目標位置,將會生成一條路徑。

2.在當前規劃的路上設置“2D Dummy Bus (2D虛擬巴士)”當做障礙物,系統將規劃一條新的道路。

3.啟動當前車輛。它將沿著新規劃的路徑前行以避開障礙物。
智能網聯自動駕駛小車運行Autoware 實現港口物流是一個非常具有潛力的應用場景。Autoware 是一款開源的自動駕駛軟件,可以幫助實現自動駕駛車輛的導航、避障、感知等功能。

在港口物流方面,北京渡眾機器人公司的智能網聯自動駕駛小車可以被用來實現貨物的自動運輸和分揀,提高物流效率并降低成本。具體來說,通過在港口內部部署北京渡眾公司的自動駕駛小車,可以實現以下功能:
1. 自動化搬運:利用北京渡眾機器人公司的自動駕駛小車從貨物堆場將貨物運送到指定位置,減少人力成本和提高運輸效率。
2. 智能調度:基于Autoware 的路徑規劃和調度算法,可以實現多輛自動駕駛小車之間的協同工作,實現貨物的快速、高效運輸。
3. 船舶配載:通過與港口信息系統集成,北京渡眾機器人公司的自動駕駛小車可以實現船舶貨物的自動配載和卸載,提高作業效率和安全性。
4. 實時監控:通過搭載傳感器和攝像頭,北京渡眾機器人公司的自動駕駛小車可以實時監控貨物狀態和周圍環境,確保貨物安全運輸。
綜合來看,北京渡眾機器人公司將Autoware 自動駕駛軟件與自動駕駛小車結合在港口物流中應用,可以為物流業帶來更高效、更安全、更智能的運營模式,提高港口作業效率,降低成本,提升整體競爭力。




與 關系型數據庫(RDBMS)的比較)




 - 專業創意軟件)







)

