資料:
https://wiki.ros.org/kinetic/Installation/Ubuntu
https://blog.csdn.net/qq_44339029/article/details/120579608
http://wiki.ros.org/melodic/Installation/Ubuntu
https://github.com/6-robot/wpb_cv
一、安裝ros環境
裝VM。
裝ubuntu18.04 desktop.iso系統。
Ubuntu 18.04 LTS (Bionic Beaver)

裝vm工具:
sudo apt update
sudo dpkg --configure -a
sudo apt-get autoremove open-vm-tools
sudo apt-get install open-vm-tools -y
sudo apt-get install open-vm-tools-desktop -y重啟虛擬機。
斷網修復:
sudo rmmod e1000
sudo rmmod e1000e
sudo rmmod igbsudo modprobe e1000
sudo modprobe e1000e
sudo modprobe igbsudo dhclient ens33sudo apt-get update && sudo apt-get upgrade
sudo apt-get purge network-manager
sudo apt-get install network-manager進root,后續一切操作都在root權限操作:
sudo -iapt install vim -y
增加ros軟件源:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu bionic main" > /etc/apt/sources.list.d/ros-latest.list'更換秘鑰:
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
更新軟件源:
sudo apt update
安裝ros:
sudo apt install ros-melodic-desktop-full -y完成后是這樣:
環境生效方式:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
安裝依賴:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential -y
初始化rosdep:
sudo apt install python-rosdep -y
vim /etc/hosts
通過IPAddress.com首頁,輸入raw.githubusercontent.com查詢到最新的真實IP地址
185.199.108.133 raw.githubusercontent.comrosdep init
二、配置工作空間
mkdir -p ~/catkin_ws/src
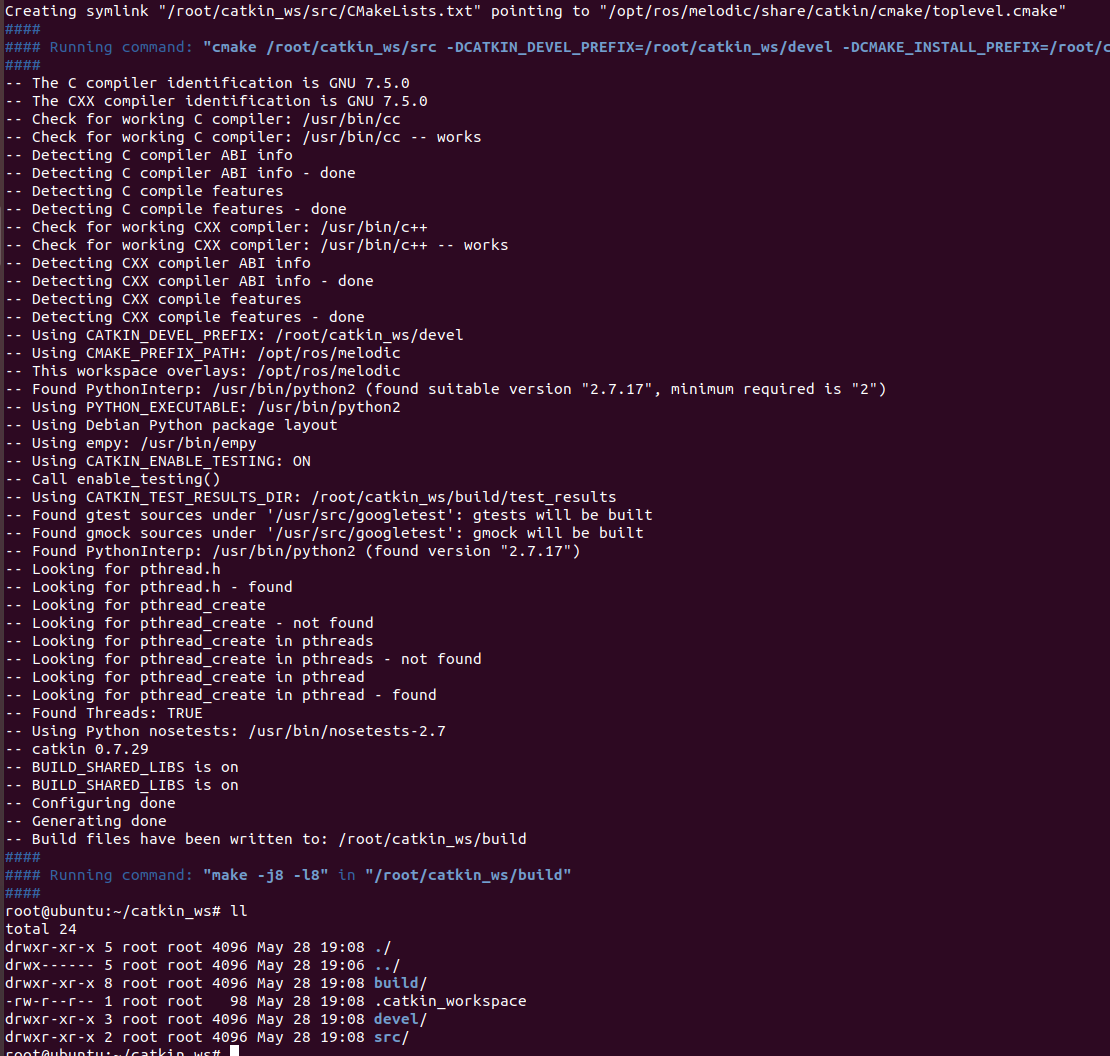
cd ~/catkin_ws/
catkin_make
三、安裝依賴項
sudo apt-get install ros-melodic-joy -y
sudo apt-get install ros-melodic-hector-mapping -y
sudo apt-get install ros-melodic-gmapping -y
sudo apt-get install ros-melodic-navigation -y
sudo apt-get install ros-melodic-sound-play -ysudo apt-get install ros-melodic-depthimage-to-laserscan -y
sudo apt-get install ros-melodic-libuvc -ysudo apt-get install ros-melodic-astra-camera -y # 裝不上 用源碼裝
sudo apt-get install ros-melodic-astra-launch -y # 裝不上 只有略過
裝不上ros-melodic-astra-camera,從源碼安裝:
sudo apt install ros-melodic-image-transport ros-melodic-image-publisher libgoogle-glog-dev libusb-1.0-0-dev libeigen3-dev# Assuming you have sourced the ros environment, same below
sudo apt install libgflags-dev ros-$ROS_DISTRO-image-geometry ros-$ROS_DISTRO-camera-info-manager\
ros-$ROS_DISTRO-image-transport ros-$ROS_DISTRO-image-publisher libgoogle-glog-dev libusb-1.0-0-dev libeigen3-devcd ~/catkin_ws/src
git clone https://github.com/libuvc/libuvc.git
cd libuvc
mkdir build && cd build
cmake .. && make -j4
sudo make install
sudo ldconfigcd ~/catkin_ws/src
git clone https://github.com/orbbec/ros_astra_camera.git
cd ..
catkin_make裝不上ros-melodic-astra-launch,略過。
cd ~/catkin_ws/src/
git clone https://github.com/6-robot/wpb_cv.git
git clone https://github.com/orbbec/ros_astra_camera.git
git clone https://github.com/orbbec/ros_astra_launch.git # 拿不到權限 略過
git clone https://github.com/ros-drivers/rgbd_launch.git
cd /root/catkin_ws
catkin_make
搞一下這個操作確認一下:
rosdep updatesource /opt/ros/melodic/setup.bash#7 安裝rosinstall這個工具和其他構建ROS包的依賴項,輕松地從一個命令下載許多 ROS 包的源樹
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential -y測試一下roscore:
做實驗:
cd ~
source /opt/ros/melodic/setup.bashcd /root/catkin_ws/src # 很重要!
catkin_create_pkg ad_sensor_package roscpp std_msgs寫那個cpp文件:
vim /root/catkin_ws/src/ad_sensor_package/src/path_following_node.cpp
寫入這個內容:
#include <ros/ros.h>
#include <std_msgs/Int32MultiArray.h>
#include <geometry_msgs/Twist.h>geometry_msgs::Twist vel_cmd; //速度消息包
static int arADVal[15];void AD_Callback(const std_msgs::Int32MultiArray msg) {if (msg.data.size() < 15)return;//獲取 AD 值for (int i = 0; i < 15; i++) {arADVal[i] = msg.data[i];}
}int main(int argc, char **argv) {ros::init(argc, argv, "wpb_cv_path_following");ros::NodeHandle n;ros::Subscriber sub_ad = n.subscribe("/wpb_cv/ad", 100, AD_Callback);ros::Publisher vel_pub = n.advertise<geometry_msgs::Twist>("/cmd_vel", 10);vel_cmd.linear.x = 0;vel_cmd.linear.y = 0;vel_cmd.linear.z = 0;vel_cmd.angular.x = 0;vel_cmd.angular.y = 0;vel_cmd.angular.z = 0;vel_pub.publish(vel_cmd);ros::Rate loop_rate(30);int nCountToStop = 0; //計時然后停止while (ros::ok()) {//顯示 AD 值printf("[AD]");for (int i = 5; i < 7; i++) {printf(" ad%d=%d ", i + 1, arADVal[i]);}printf("\n");//默認速度值(如果灰度傳感器沒有檢測到黑線,默認機器人正沿著線走,則直行即可)vel_cmd.linear.x = 0.05;vel_cmd.angular.z = 0; //檢測左前灰度傳感器是否檢測到黑線if (arADVal[5] < 2370) {vel_cmd.linear.x = 0.05;vel_cmd.angular.z = 0.2;}//檢測右前灰度傳感器是否檢測到黑線if (arADVal[6] < 2480) {vel_cmd.linear.x = 0.05;vel_cmd.angular.z = -0.2;}//運行 10 秒后自動停止(速度全賦值 0)nCountToStop++;if (nCountToStop > 600) {vel_cmd.linear.x = 0;vel_cmd.angular.z = 0;ROS_WARN("Stop");}//向底盤發送速度值vel_pub.publish(vel_cmd);//延時ros::spinOnce();loop_rate.sleep();}return 0;
}
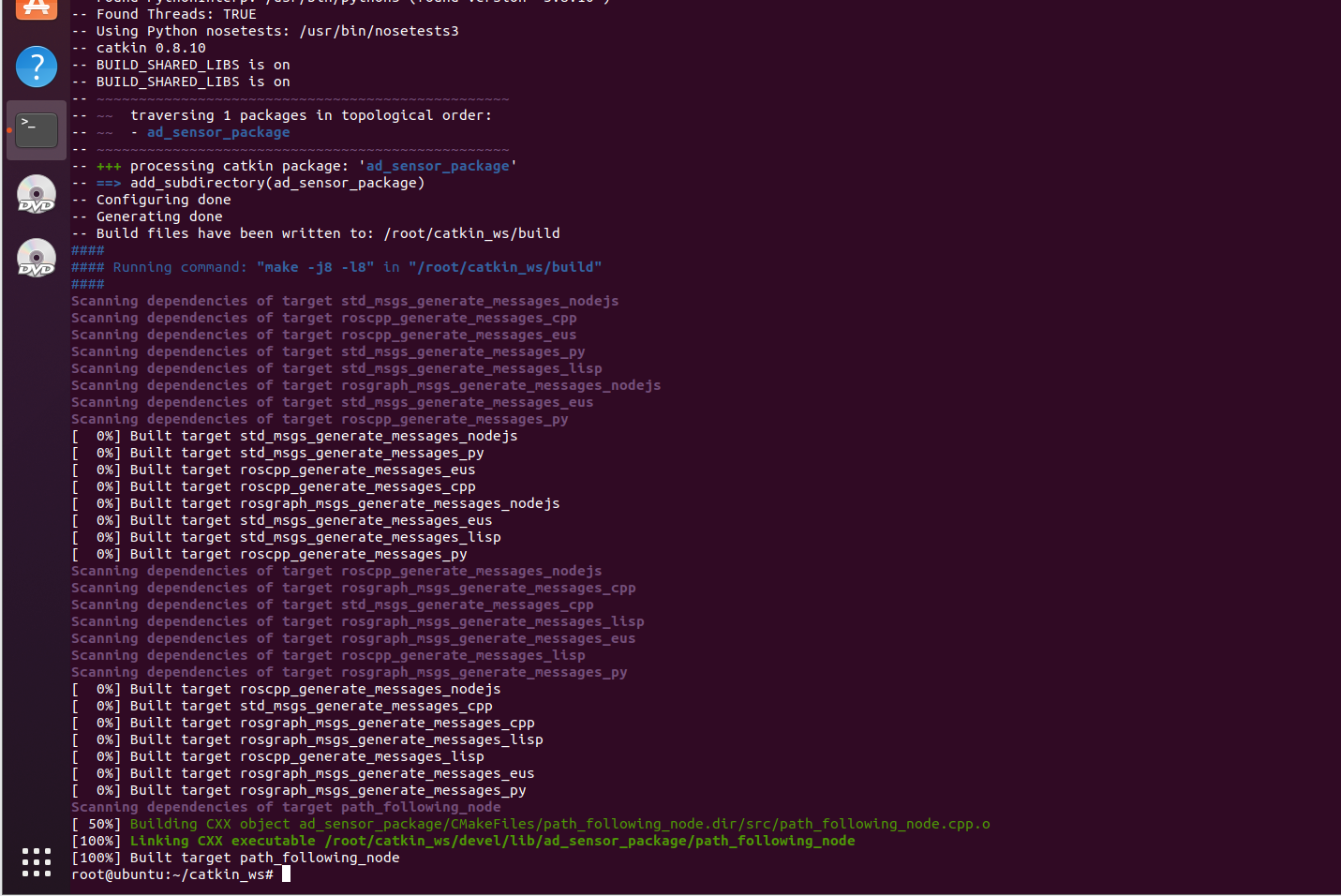
一定要注意我的執行順序,最后一句catkin_make構建工作空間后是這樣:
cd /root/catkin_ws
catkin_make
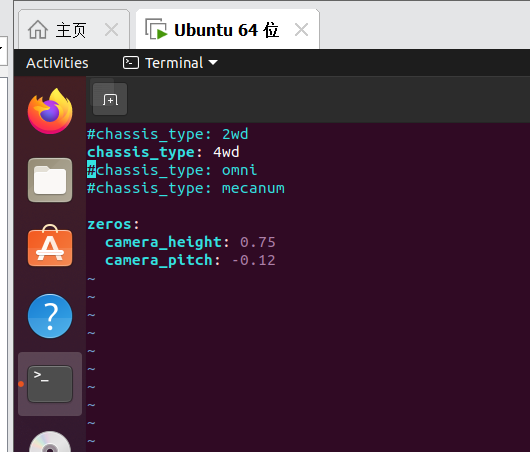
修改settings.yam:
cd /root/catkin_ws/src/wpb_cv/wpb_cv_bringup/config
再次構建:
source /opt/ros/melodic/setup.bash
cd /root/catkin_ws
catkin_make
啟動節點:
cd /root/catkin_ws
roslaunch wpb_cv_bringup minimal.launch
報錯了:
root@ubuntu:~/catkin_ws# roslaunch wpb_cv_bringup minimal.launch
RLException: [minimal.launch] is neither a launch file in package [wpb_cv_bringup] nor is [wpb_cv_bringup] a launch file name
The traceback for the exception was written to the log file
有這個文件的,報錯原因要么就是略過了2個包,要么就是要連接硬件?
root@ubuntu:~/catkin_ws# find ~ -name “minimal.launch”
/root/catkin_ws/src/wpb_cv/wpb_cv_bringup/launch/minimal.launch
cmakelist:
add_executable(path_following_node
src/path_following_node.cpp
)
add_dependencies(path_following_node
${${PROJECT_NAME}_EXPORTED_TARGETS}
${catkin_EXPORTED_TARGETS})
target_link_libraries(path_following_node
${catkin_LIBRARIES}
)
或者用這個試試:
add_executable(path_following_node
src/path_following_node.cpp
)
add_dependencies(path_following_node
${${PROJECT_NAME}_EXPORTED_TARGETS}
${catkin_EXPORTED_TARGETS})
target_link_libraries(path_following_node${catkin_LIBRARIES}${console_bridge_LIBRARIES} # 添加這一行來鏈接console_bridge庫
)









)
)


 _Mysql (8.0.X)設置密碼強度)





