本文參考:計算機視覺life 僅作筆記用
書接上回,上回不清不楚的介紹了旋轉矩陣&旋轉向量和四元組
現在回顧一下重點:
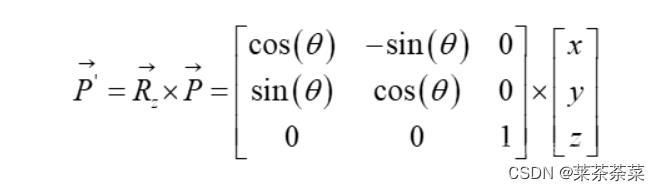
本著繞誰誰不變的變則
假設繞z軸旋轉θ,旋轉矩陣為:
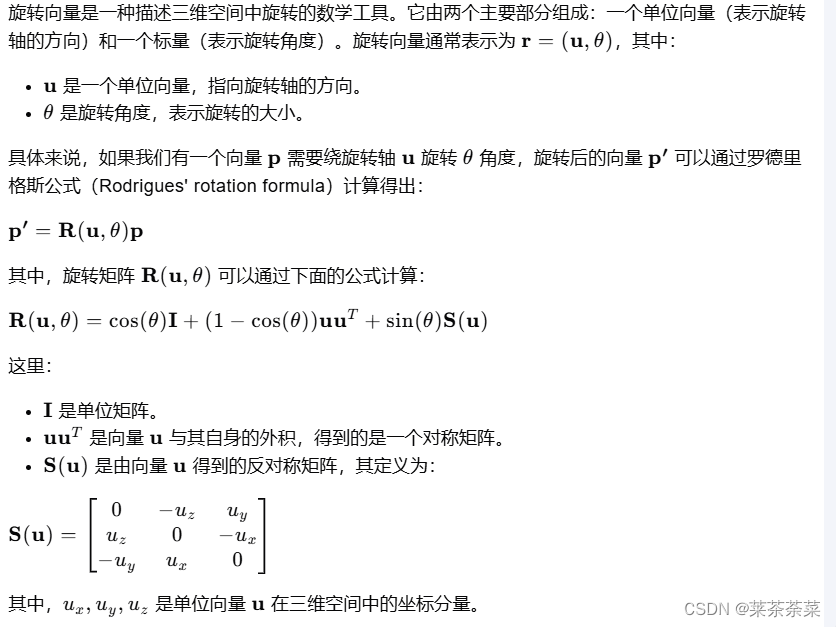
再回顧一下旋轉向量的表示以及這個基本記不住的羅德里格斯公式,記不住也沒事:
一個例子
已知旋轉矩陣定義是沿著Z軸旋轉45°。請按照該定義初始化旋轉向量、旋轉矩陣、四元數、歐拉角。請編程實現:
1、以上四種表達方式的相互轉換關系并輸出,并參考給出的結果驗證是否正確。
2、假設平移向量為(1,2,3),請輸出旋轉矩陣和該平移矩陣構成的歐式變換矩陣,并根據歐式變換矩陣提取旋轉向量及平移向量。
#include <iostream>
#include <Eigen/Dense>using namespace Eigen;int main() {// 初始化旋轉參數double angle = M_PI/4; // 45°轉換為弧度Vector3d axis = Vector3d::UnitZ(); // Z軸// 初始化旋轉向量Vector3d rotation_vector = angle * axis;// 初始化旋轉矩陣Matrix3d rotation_matrix;// AngleAxisd(angle, axis) 創建了一個表示繞著給定軸 axis 旋轉 angle 弧度的旋轉向量。//在Eigen庫中,AngleAxisd 類表示一個旋轉向量,它由一個旋轉軸和一個旋轉角度組成。//它的構造函數可以接受旋轉角度和旋轉軸作為參數,也可以接受一個旋轉矩陣作為參數,并從中提取旋轉軸和旋轉角度。//調用 toRotationMatrix() 方法將該旋轉向量轉換為對應的旋轉矩陣。rotation_matrix = AngleAxisd(angle, axis).toRotationMatrix();// 初始化四元數Quaterniond quaternion(rotation_matrix);// 初始化歐拉角Vector3d euler_angles = rotation_matrix.eulerAngles(2, 1, 0); // ZYX順序// 輸出四種表達方式 // 旋轉向量std::cout << "Rotation Vector: " << rotation_vector.transpose() << std::endl; // .transpose()方法被用于將向量和矩陣輸出成為行向量的形式,以方便顯示在控制臺上。// 旋轉矩陣std::cout << "Rotation Matrix:\n" << rotation_matrix << std::endl;// coeffs()方法用于獲取四元數對象的系數,返回一個四維向量。std::cout << "Quaternion: " << quaternion.coeffs()<< std::endl;// 歐拉角std::cout << "Euler Angles (ZYX): " << euler_angles.transpose() << std::endl;// 假設平移向量為(1,2,3)Vector3d translation_vector(1, 2, 3);// 構造歐式變換矩陣Matrix4d euclidean_transform_matrix = Matrix4d::Identity(); // 創建一個4x4的單位矩陣的靜態方法// 將旋轉矩陣賦值給歐幾里德變換矩陣的左上角的3x3子矩陣,即旋轉部分euclidean_transform_matrix.block<3,3>(0,0) = rotation_matrix;// 將平移向量賦值給歐幾里德變換矩陣的右上角的3x1子矩陣,即平移部分euclidean_transform_matrix.block<3,1>(0,3) = translation_vector;/* 在Eigen庫中,AngleAxisd()是用于創建一個旋轉向量(Angle-Axis)的構造函數。Angle-Axis旋轉表示通過一個旋轉軸和一個旋轉角度來描述旋轉。具體來說,AngleAxisd()的使用方法如下Eigen::AngleAxisd angle_axis(angle, axis);在這段代碼中,AngleAxisd(rotation_matrix)創建了一個AngleAxisd類型的對象,該對象代表了由旋轉矩陣rotation_matrix表示的旋轉。然后,.axis()方法用于獲取該旋轉向量的旋轉軸,而.angle()方法用于獲取旋轉角度。接著,AngleAxisd(rotation_matrix).axis() * AngleAxisd(rotation_matrix).angle()部分將旋轉向量的軸乘以旋轉角度,這將得到一個旋轉向量,其方向由旋轉軸決定,大小由旋轉角度決定。這個旋轉向量被賦值給了extracted_rotation_vector。*/// 從歐式變換矩陣分解出旋轉向量和平移向量Vector3d extracted_rotation_vector = AngleAxisd(rotation_matrix).axis() * AngleAxisd(rotation_matrix).angle();/* block<3,1>(0,3)是Eigen庫中的一個函數,用于從矩陣中提取特定的塊。在這里,block<3,1>(0,3)表示提取了從第0行開始,第3列開始的一個3x1的塊,即歐氏變換矩陣的前三個元素(0, 1, 2行,3列),這通常是表示平移向量的部分。*/ Vector3d extracted_translation_vector = euclidean_transform_matrix.block<3,1>(0,3);// 輸出歐式變換矩陣、提取的旋轉向量和平移向量// 歐式變換矩陣std::cout << "\nEuclidean Transformation Matrix:\n" << euclidean_transform_matrix << std::endl;// 旋轉向量std::cout << "Extracted Rotation Vector: " << extracted_rotation_vector.transpose() << std::endl;// 平移向量std::cout << "Extracted Translation Vector: " << extracted_translation_vector.transpose() << std::endl;return 0;
}多看幾遍代碼,俺就算基本入第一道門了。。。


 _Mysql (8.0.X)設置密碼強度)














)
及HTTP協議通信步驟介紹和請求、響應階段詳解;)
