25年最新連接去除場景瞬態對象工程與3DGS的pipeline,改進了spotlesssplats,已開源:
[2506.02751] RobustSplat: Decoupling Densification and Dynamics for Transient-Free 3DGSAbstract page for arXiv paper 2506.02751: RobustSplat: Decoupling Densification and Dynamics for Transient-Free 3DGS![]() https://arxiv.org/abs/2506.02751
https://arxiv.org/abs/2506.02751
abstract
3D高斯濺射(3DGS)技術因其在新視角合成與三維建模中能夠實現實時且具有照片級真實感的渲染效果而備受關注。然而,現有方法難以準確建模受瞬態物體(如移動行人、臨時障礙物等)影響的場景,導致渲染圖像中出現偽影。我們發現,高斯致密化過程在增強場景細節捕捉能力的同時,會因生成過多用于建模瞬態干擾的高斯函數而無意中加劇這些偽影。針對這一問題,我們提出RobustSplat解決方案,其核心基于兩項關鍵設計:首先引入延遲高斯增長策略,在允許高斯分裂/克隆操作前優先優化靜態場景結構,從而抑制早期優化階段對瞬態物體的過擬合;其次設計尺度級聯mask bootstrapping方法,先利用低分辨率特征相似性監督實現可靠的初始瞬態掩碼估計(充分利用其更強的語義一致性和抗噪聲魯棒性),再逐步過渡到高分辨率監督以實現更精確的掩碼預測。在多個高難度數據集上的大量實驗表明,本方法性能優于現有技術,充分證明了其魯棒性與有效性。
1. Introduction
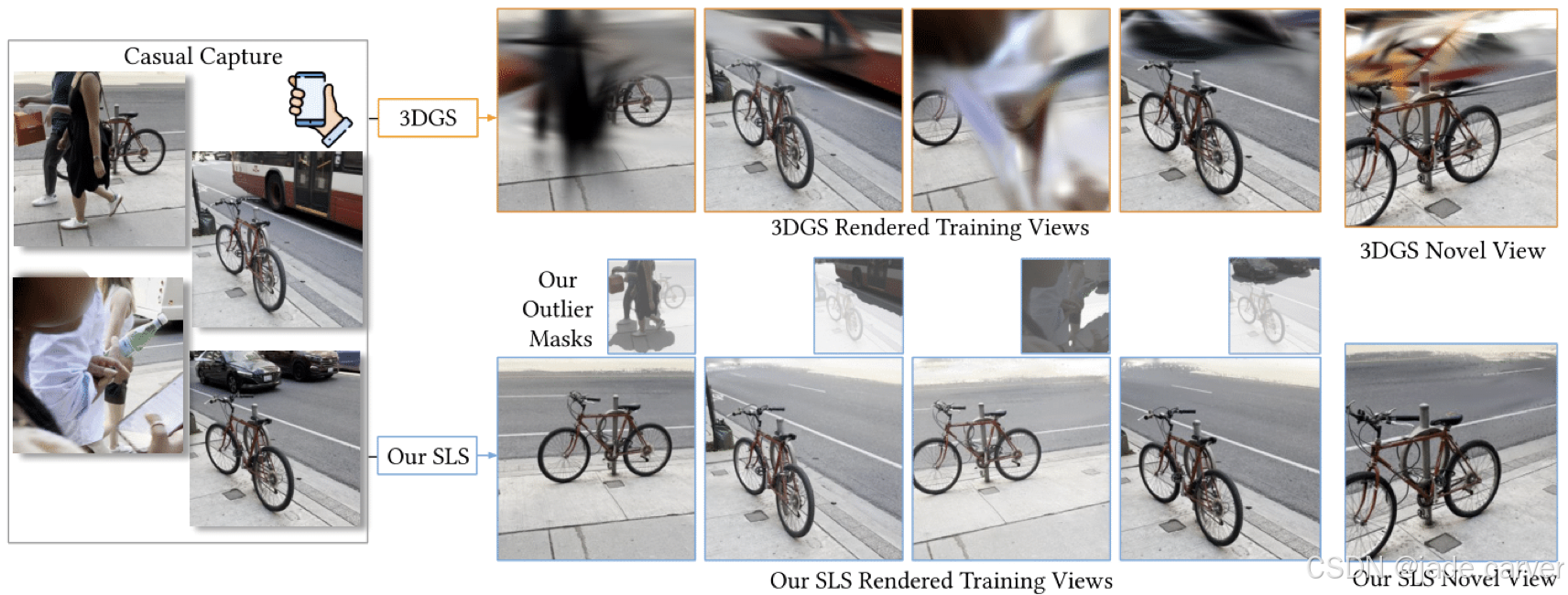
當前的3DGS重建方法一般假設場景是靜態的,而實際上我們真實的capture環境是動態變化的,并且這同樣干擾到了我們多視圖一致的要求,導致場景結果出現大量artifacts。
1.1存在的挑戰
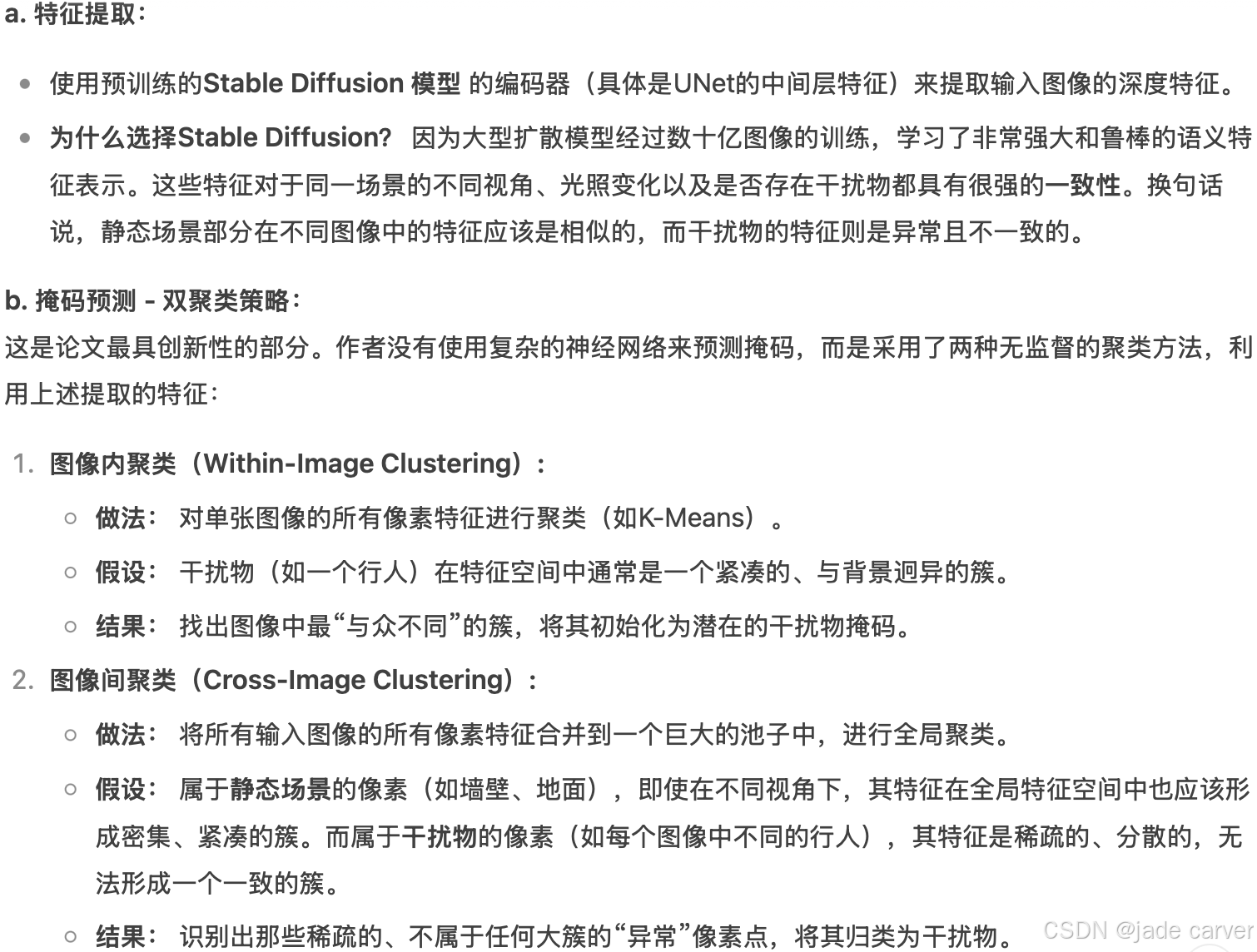
實現此目的核心挑戰在于準確檢測并過濾不同圖像中受運動影響的區域。現有方法主要遵循三種范式:(1)基于特定類別的語義掩碼(例如人體和車輛),難以泛化到多樣化的瞬態物體;(2)通過考慮光度重建損失最小化中的不確定性進行基于不確定性的掩碼,但往往無法可靠預測運動掩碼[24];(3)基于學習的運動掩碼方法,使用MLP以圖像特征(如DINO特征[28])作為輸入來預測運動掩碼,并通過捕獲圖像與渲染圖像之間的光度殘差[34]或特征相似性[12,18]進行監督。
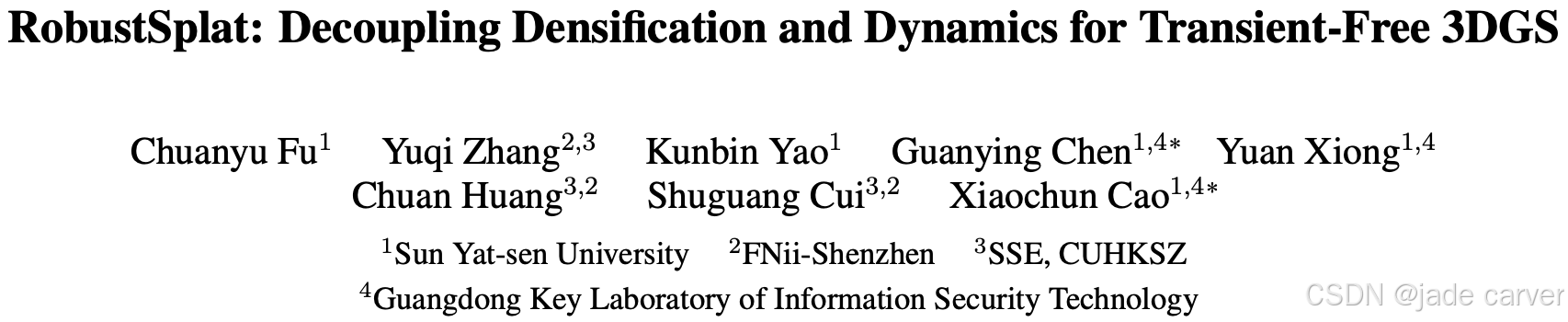
盡管基于學習的方法在無瞬態干擾的3DGS優化中表現出色,它們仍存在關鍵局限性。在訓練初期,3DGS表征未充分優化,會導致渲染結果過度平滑,動態和靜態區域均出現較大的光度殘差和弱特征相似性。將這些不可靠信號作為掩碼估計的監督會導致瞬態掩碼不準確:過小的掩碼無法消除瞬態物體而引發偽影,而早期過度平滑的重建會誤分類靜態區域,阻礙優化進程并導致重建不足,如圖1所示。
1.2分析
為解決這些問題,需要重點考慮兩個關鍵方面。首先,在初始優化階段,應當顯式約束3DGS的優化過程,防止在缺乏準確瞬態掩碼的情況下對瞬態區域產生過擬合。其次,早期迭代中的掩碼監督應設計為對欠重建區域更具容錯性,從而保證靜態區域能夠充分重建。
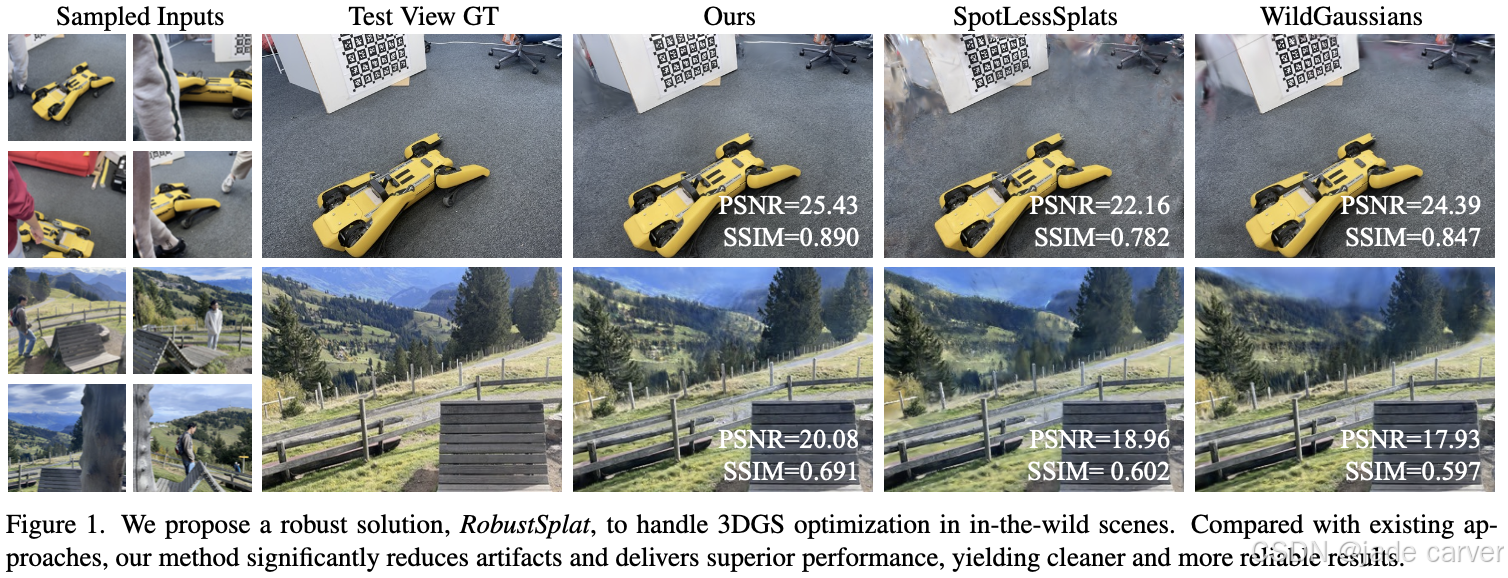
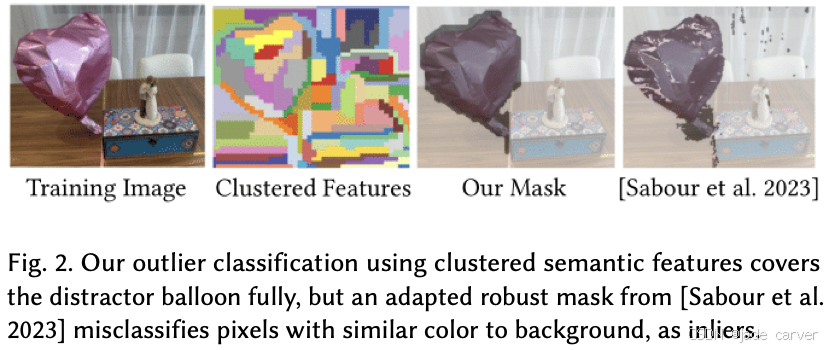
通過對3DGS方法的詳細分析,我們發現高斯致密化過程(默認在500次迭代后啟動)在增強場景細節捕捉能力的同時,會無意中引入偽影(見圖2)。初始階段3DGS能較好地擬合場景靜態部分,但隨著致密化進程推進,會傾向于過度擬合動態區域,導致移動物體影響區域出現偽影。令人驚訝的是,我們發現顯式禁用原始3DGS中的致密化過程可有效緩解這些偽影,無需任何專門設計即可獲得與SpotLessS-plats[34]相當的結果。
這是因為在沒有致密化的情況下,圖像重建損失僅為3D高斯函數提供有限的位置梯度,主要優化其形狀和顏色參數。因此,初始放置的高斯函數位置保持穩定,降低了對瞬態元素過擬合的風險。但致密化的缺失會導致高斯數量不足,無法充分表征精細細節,使得點初始化稀疏區域的渲染圖像呈現過度平滑現象。
1.3 our approach
我們提出了一種簡單而有效的RobustSplat方法,該方法包含兩個核心設計:首先提出延遲高斯增長策略,優先重建3D場景的全局結構,同時顯式避免過早擬合動態區域;其次引入尺度級聯掩碼自舉方法,在保持對瞬態區域敏感性的同時改善欠重建區域的掩碼監督信號。該方法逐步提升監督分辨率,利用低分辨率特征能更有效捕捉全局一致性并在早期優化階段抑制局部噪聲的特性。
我們的核心貢獻可總結如下:
? 系統分析了3DGS致密化過程如何導致瞬態物體引發的偽影,為改進無干擾物3DGS優化提供了新見解
? 提出RobustSplat魯棒方法,集成延遲高斯增長策略與尺度級聯mask bootstrapping技術,有效降低動態物體在3DGS優化過程中的影響
? 通過簡單而有效的設計,證明了本方法優于現有最先進技術
2. Related Work
Robustness in 3DGS
3DGS采用離散顯式表示。因此,許多研究[9,18,36,44,59]探索將參考圖像的全局信息與局部高斯特征相結合的光照建模策略。對于干擾物去除,通常使用掩碼[1,8,39,40,43,49,50]來過濾瞬態物體。
為處理瞬態物體,WildGaussians[18]引入DINO[28]特征來預測不確定性,并將其轉換為掩碼。Robust3DGaussians[39]利用SAM[17]增強預測掩碼的質量。SpotLessSplats[34]借助Stable Diffusion[32]的特征,設計了兩種掩碼預測的聚類策略。T-3DGS[30]提出了基于一致性損失的無監督瞬態檢測器和視頻目標分割模塊來跟蹤視頻中的物體。
最近,DeSplat[42]僅通過最小化光度損失就將3DGS場景分解為靜態3DGS和每視角瞬態3DGS。HybridGS[20]則將3DGS與每視角2D圖像高斯結合,解耦動態和靜態元素。DAS3R[51]和RoMo[12]利用時間一致性約束估計動態視頻的運動掩碼,但這些方法無法直接應用于無序圖像集。與現有方法不同,我們分析了3DGS的致密化過程,并提出基于延遲高斯增長和尺度級聯掩碼自舉的簡單有效解決方案,可可靠消除瞬態物體的影響。
Optimization in Densification and Regularization
現有研究致力于改進3DGS的致密化和優化過程[3,10,14,60]。例如,部分方法[55,58,62]分析了梯度計算過程,發現了梯度碰撞或平均化等問題,這些問題會導致重建質量下降。RAIN-GS[15]研究了不依賴COLMAP SfM的3DGS替代初始化策略。這些方法均未考慮瞬態物體的影響。在本研究中,我們重點分析并利用高斯致密化在無瞬態干擾3D重建中的行為特性。
3. Method
3.0 Spotlesssplats簡單介紹
我們的方法基于近期聯合優化3D表示與瞬態物體掩碼的魯棒3DGS方法[Spotlesssplats]。瞬態掩碼選擇性過濾圖像中的動態區域,同時通過為掩碼MLP優化提供更精確的監督來改進場景建模。
下面簡單介紹一下Spotlesssplats:
3.1 overview
從前面的介紹我們可知,Spotlesssplats通過瞬態掩碼選擇性過濾圖像中的動態區域,同時通過為掩碼MLP優化提供更精確的監督來改進場景建模。這種相互依賴關系可能導致早期訓練不穩定。一方面,若掩碼過小,則無法過濾所有瞬態區域,導致新生成的高斯函數擬合瞬態物體,這在后期難以消除偽影。另一方面,靜態場景重建在早期往往過度平滑,會誤導掩碼MLP將靜態區域誤分類為動態區域,阻礙其重建并導致靜態內容表征不足。
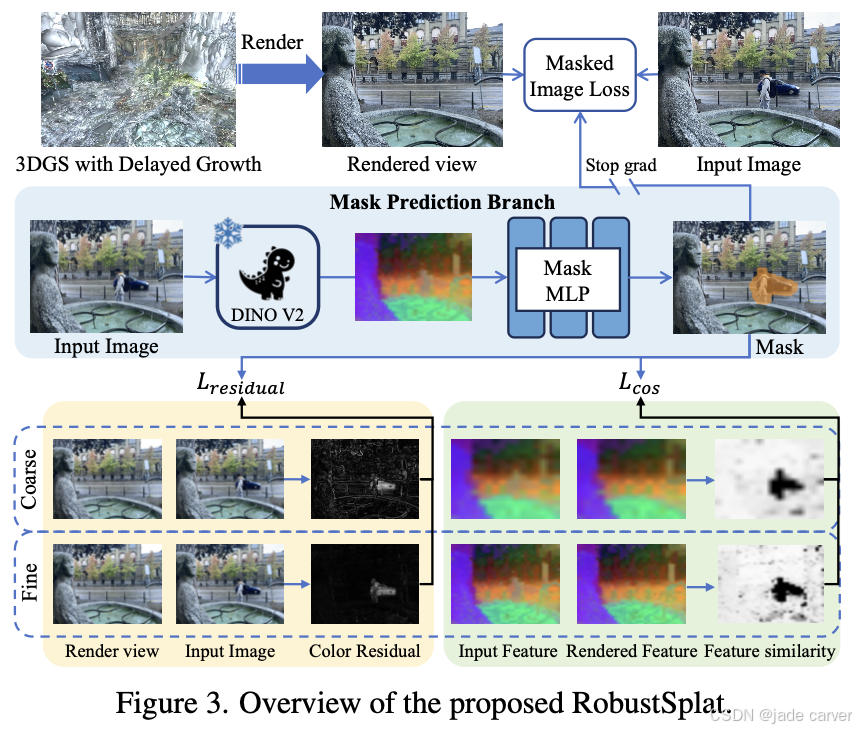
為解決前面所述問題,我們引入兩項有效設計(見圖3)。首先提出延遲高斯增長策略,推遲高斯致密化過程以防止早期擬合瞬態物體(3.2、3.3);其次提出尺度級聯mask bootstrapping方法,隨時間推移逐步優化掩碼預測,減少靜態區域被誤判為瞬態區域的情況,從而改善靜態內容的優化效果。
3.2. 3DGS with Transient Mask Estimation
3.2.1 3DGS的loss
依舊沿用之前使用的l1+ssim損失:
![]()
3.2.2 Transient Mask Estimation
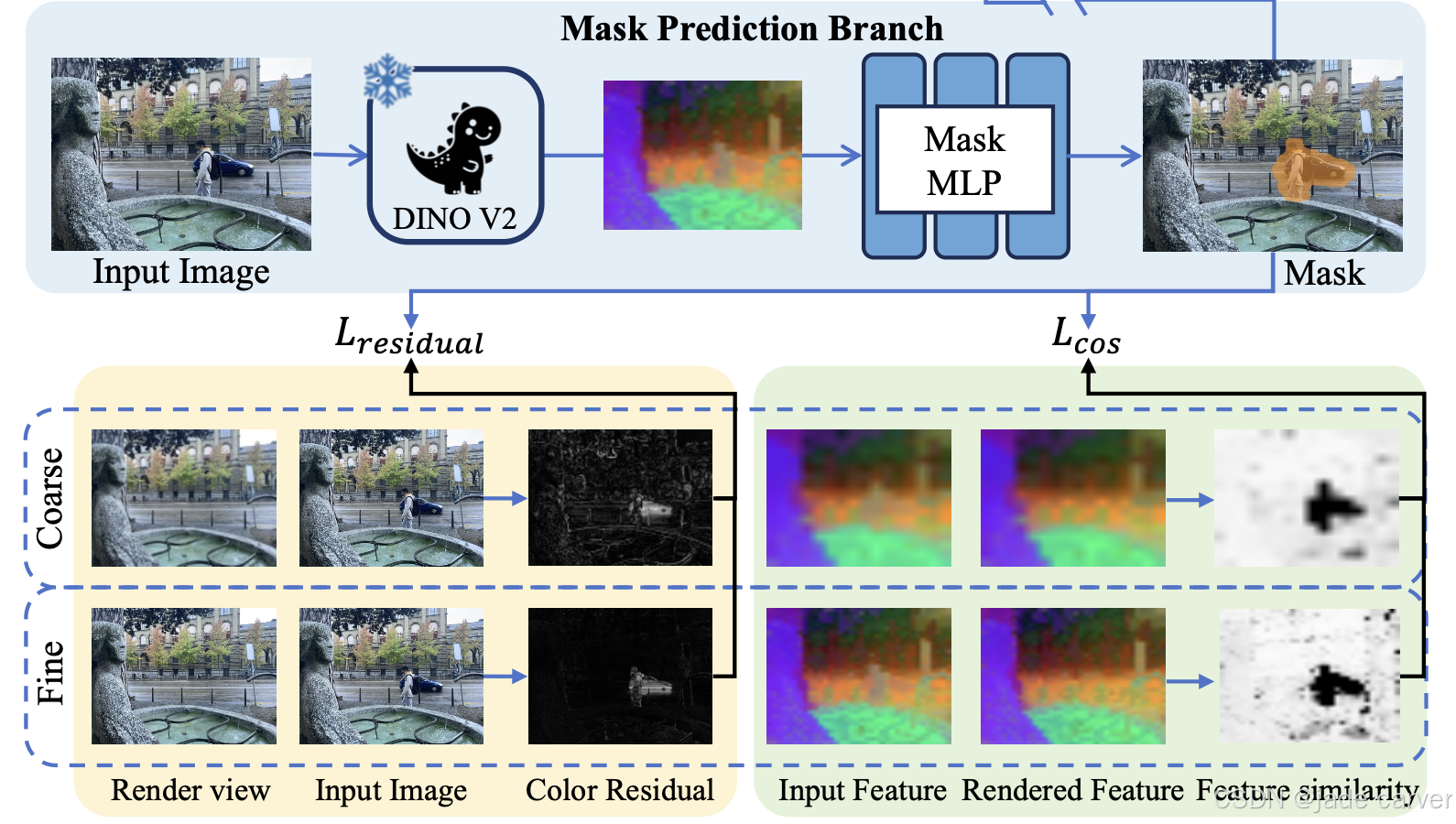
對于瞬態對象的mask處理,我們follow了Wildgaussians和Spotlesssplats的方法,使用基于dinov2提取的圖像特征![]() 輸入MLP得到mask,可以看到,這個一個sigmoid計算的為每個像素預測的瞬態概率。它的值在0到1之間。:
輸入MLP得到mask,可以看到,這個一個sigmoid計算的為每個像素預測的瞬態概率。它的值在0到1之間。:
![]()
然后,估計的掩碼用于應用排除瞬態區域的掩碼光度量損失。(dinov2在質量和速度上較為均衡)
3.2.3 Optimization of Mask MLP
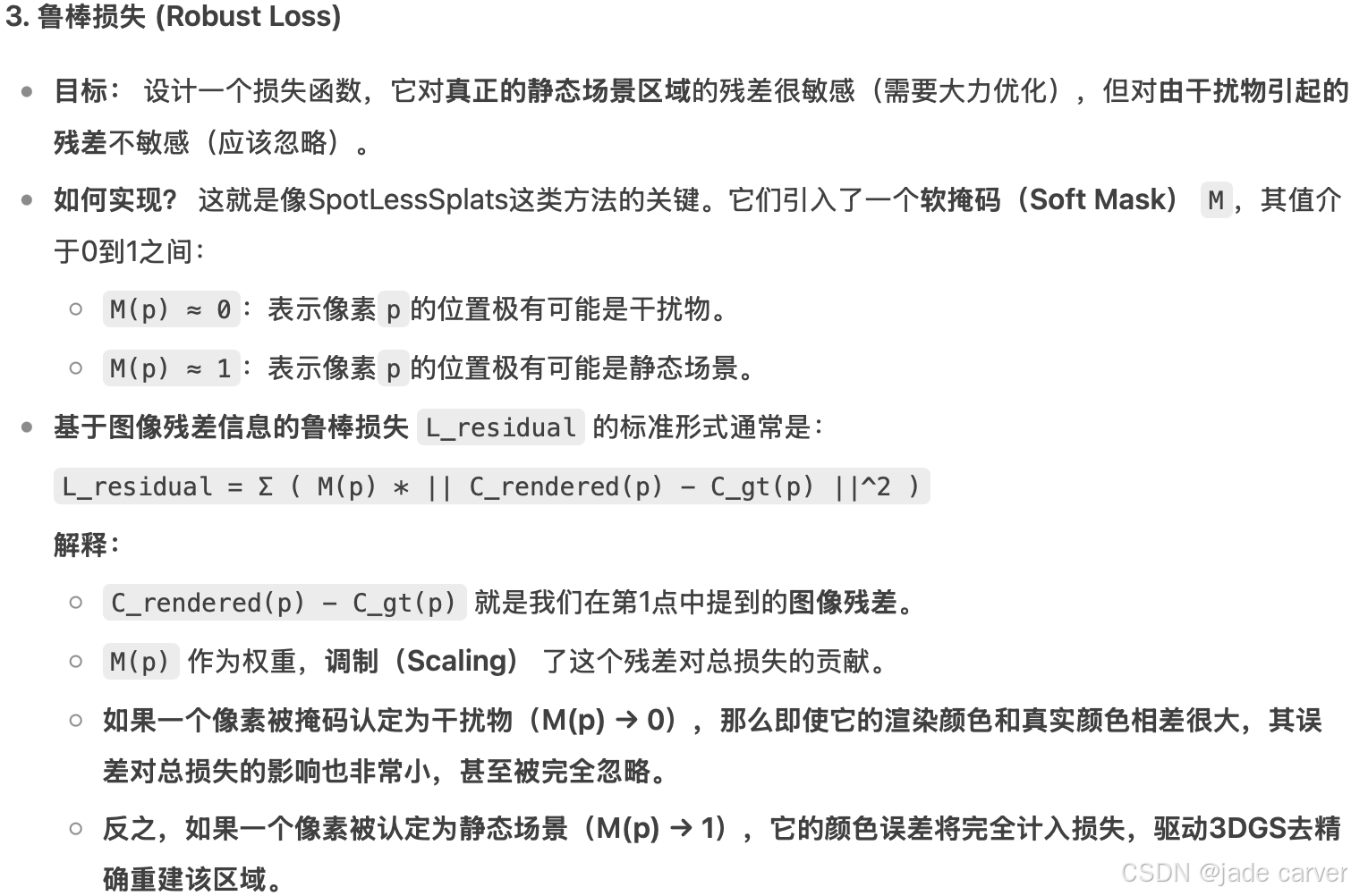
掩碼MLP權重的優化需要適當的監督信號。我們采用[34]中提出的基于圖像殘差信息的圖像魯棒損失L_residual作為監督項之一。
這里大概解釋一下spotlessplats中的robust loss的思想,不一定完全一模一樣:
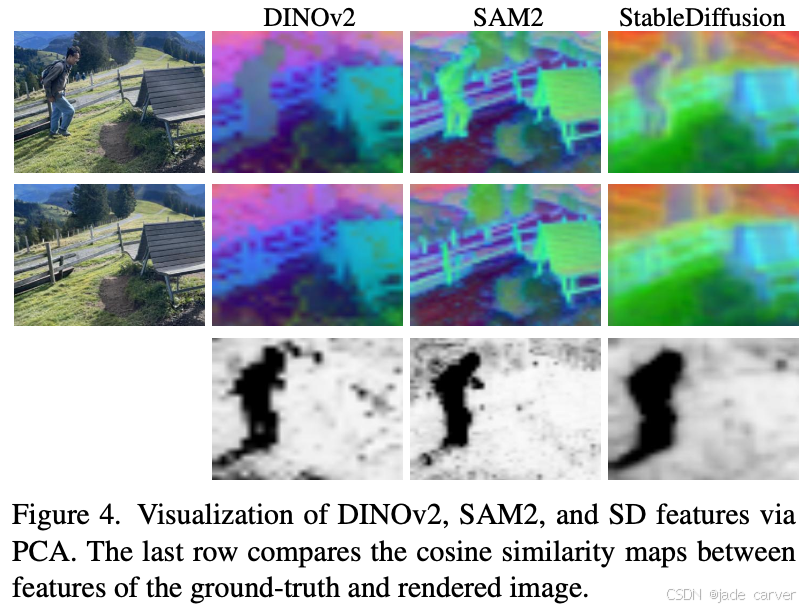
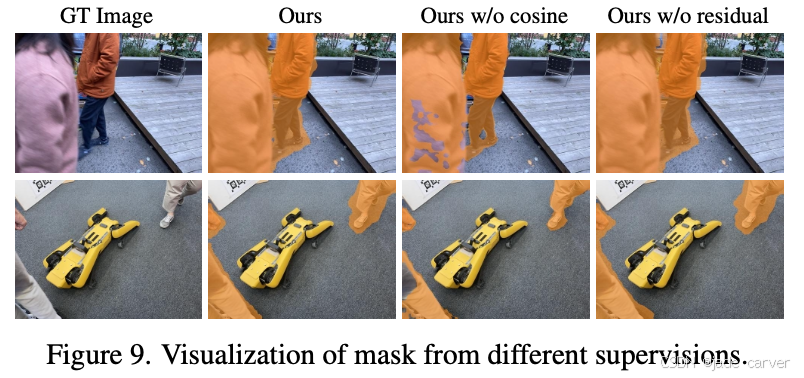
為更好地利用從圖像中提取的深層高維特征信息(其特性與圖像殘差不同),我們額外采用了特征魯棒損失L_cos,該損失利用渲染圖像與捕獲圖像之間的特征相似性信息。具體而言,我們提取真實圖像ft與渲染圖像f′t的DINOv2特征,并計算它們的余弦相似度圖,隨后按照[18]的方法將其值域轉換至[0,1]范圍:
![]()
當特征余弦相似度為1時M_cos等于1,當相似度低于0.5時則為0。特征魯棒損失定義為:
![]()
最終,MLP的loss如下:
![]()
3.3. Delayed Gaussian Growth for Mask Learning
3.3.1 why we delay?densification?
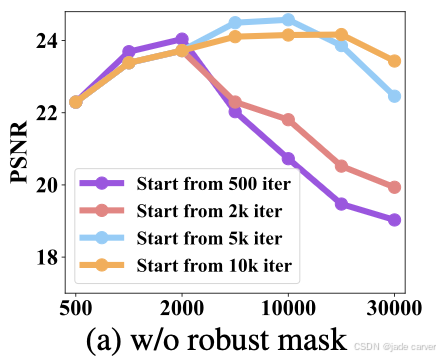
如圖5(a)所示,延遲密度化允許3DGS在早期訓練階段專注于重建靜態場景。然而,一旦密度開始,新引入的高斯傾向于適應瞬態物體,導致PSNR度量的減少。值得注意的是,早期密度的模型表現出較差的性能,這表明過早的密度化促進了瞬態物體擬合。這些結果表明,推遲密度化有助于模型在適應動態元素之前更好地捕獲靜態成分。
3.3.2 Mask Learning with Delayed Gaussian Growth
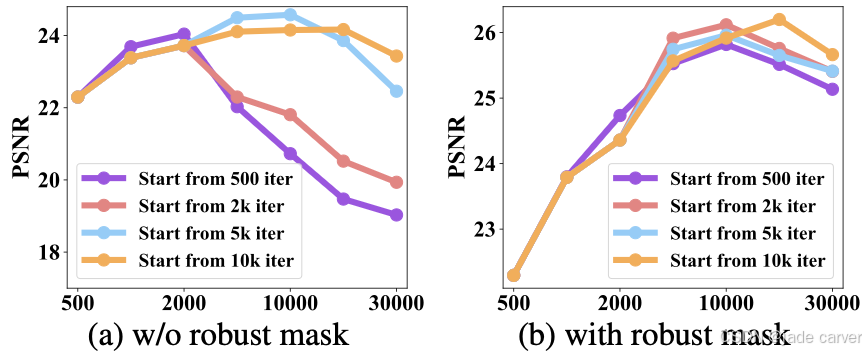
我們將瞬態掩碼學習機制集成到延遲致密化流程中。如圖5(b)所示,通過利用掩碼預測來調控高斯擴張,該整合策略顯著提升了重建精度。這種借助掩碼預測約束高斯擴張的方法,有效抑制了瞬態偽影并增強了場景保真度。特別值得注意的是,延遲致密化起始時機越晚的變體,所能達到的精度越高。這些結果表明:瞬態掩碼學習與延遲致密化通過協同工作機制,共同提升了3DGS優化的穩定性和準確性。
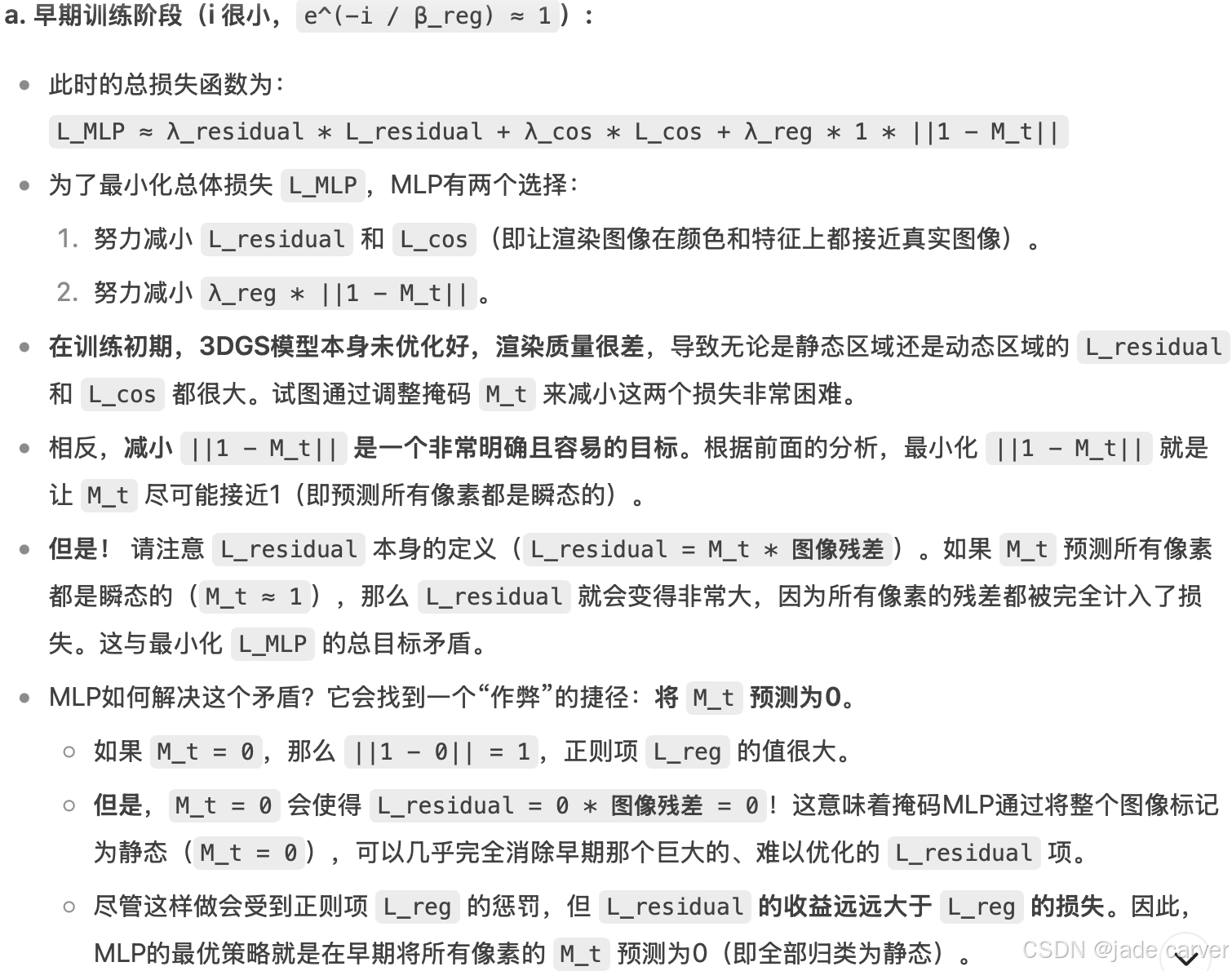
3.3.3?Mask Regularization at Early Stage?
這里討論一下early stage中的mask,因為前面我們提到了,瞬態對象的mask對于GS的前期會有過于平滑的影響,這里,我們同樣受益于delayed densification的操作,我們對于前面使用MLP預測的mask做一個分類,以區分瞬態對象與靜態區域1-Mt,然后使用該mask做filter過濾出瞬態對象作為監督,如下:
![]()
至此,mask相關的所有loss項如下:
![]()
3.4. Scaled-cascaded Mask Bootstrapping
盡管我們的延遲高斯增長策略通過將優化聚焦于靜態區域,有效減弱了瞬態區域的影響,但靜態場景的欠重建問題在早期階段依然存在。該問題源于初始高斯點的稀疏性,尤其是在大規模無約束戶外場景中。因此,這些區域生成的渲染結果會呈現過度平滑的現象,從而導致較大的圖像殘差和較低的特征相似度。這進而會誤導掩碼MLP,將欠重建的靜態區域誤分類為動態區域。
3.4.1?Robust Feature Similarity Computation?
我們的目標是在優化初期階段,使監督信號對欠重建區域更具容錯性。我們觀察到,雖然從高分辨率圖像中提取的高分辨率特征能提供細粒度的空間細節,但其感受野有限,且對局部噪聲的敏感性較高。相比之下,低分辨率特征能更有效地捕捉全局一致性,因為每個特征塊整合了更廣泛的上下文信息,固有地抑制了特征表示中的局部噪聲。
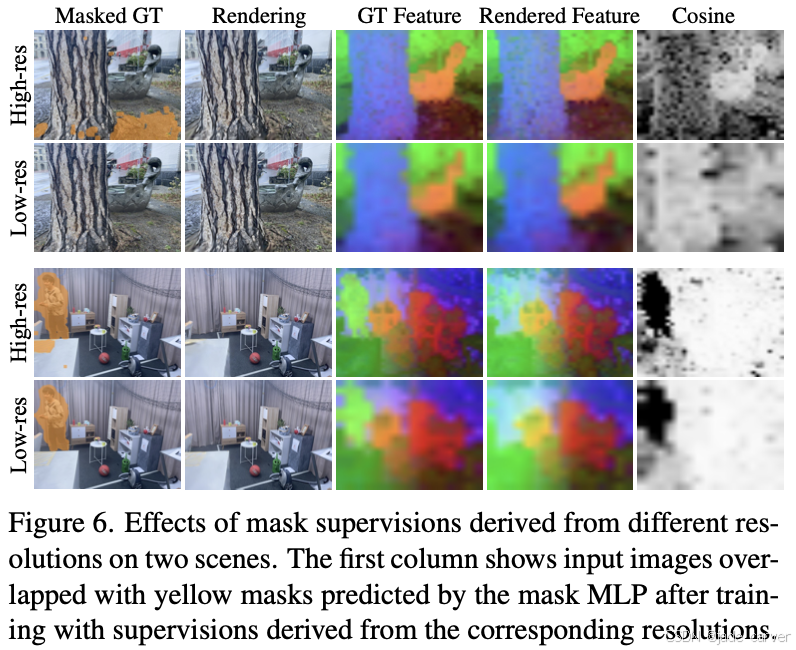
如圖6所示,與高分辨率圖像相比,低分辨率圖像天然地抑制了精細細節,從而產生更平滑的顏色殘差和特征相似度。這表明,在早期階段以較低分辨率評估殘差和特征相似度,可以提升魯棒性——既能保留欠重建的靜態區域,又能維持對瞬態區域的敏感性。
3.4.2 Coarse-to-fine Mask Supervision?
我們提出了一種分辨率級聯方法,通過從低分辨率信號逐步過渡到高分辨率信號來細化掩碼監督。該方法有助于掩碼MLP在優化初期保留更多靜態區域。
在高斯致密化過程開始前,通過3DGS渲染低分辨率圖像,并計算低分辨率圖像殘差與特征一致性,以此監督掩碼MLP的優化,以及靜態場景區域的充分擬合。一旦致密化過程啟動,我們則切換至高分辨率殘差及高分辨率特征間的余弦相似度計算,確保能對瞬態區域與靜態區域實現更精細的區分。
4. Experiments
數據集
在兩個公認的高難度基準數據集上評估RobustSplat方法的性能:NeRF On-the-go數據集包含12個具有不同遮擋比例(5%-30%)的室外場景,其中6個常規場景和6個更復雜的擴展場景(稱為NeRF On-the-go II);RobustNeRF數據集則包含4個專門設計的室內場景,每個場景都包含多種干擾重建保真度的瞬態物體。這兩個數據集共同提供了涵蓋室內外環境的全面測試基準。
baseline
本研究與多個先進方法進行對比:包括原始3DGS基礎方法,以及最新推出的SpotLessSplats、WildGaussians、Robust3DGaussians和T-3DGS等專攻魯棒性優化的方法。所有對比實驗均使用各方法的公開實現,并在完全相同的相機參數設置下進行,確保比較結果的公平性和可重復性。
metrics
采用主觀視覺評估和客觀定量指標相結合的評價體系。定量評估采用計算機視覺領域通用的三個指標:PSNR(峰值信噪比)、SSIM(結構相似性指數)和LPIPS(學習感知圖像塊相似度),分別從像素級精度、結構保真度和感知質量三個維度全面衡量重建效果。視覺對比則重點關注瞬態偽影消除情況和靜態細節保留質量。
4.1. NeRF On-the-go?Dataset
如表1所示,我們的方法在全部六個場景的PSNR、SSIM和LPIPS三項指標上均取得最佳性能;

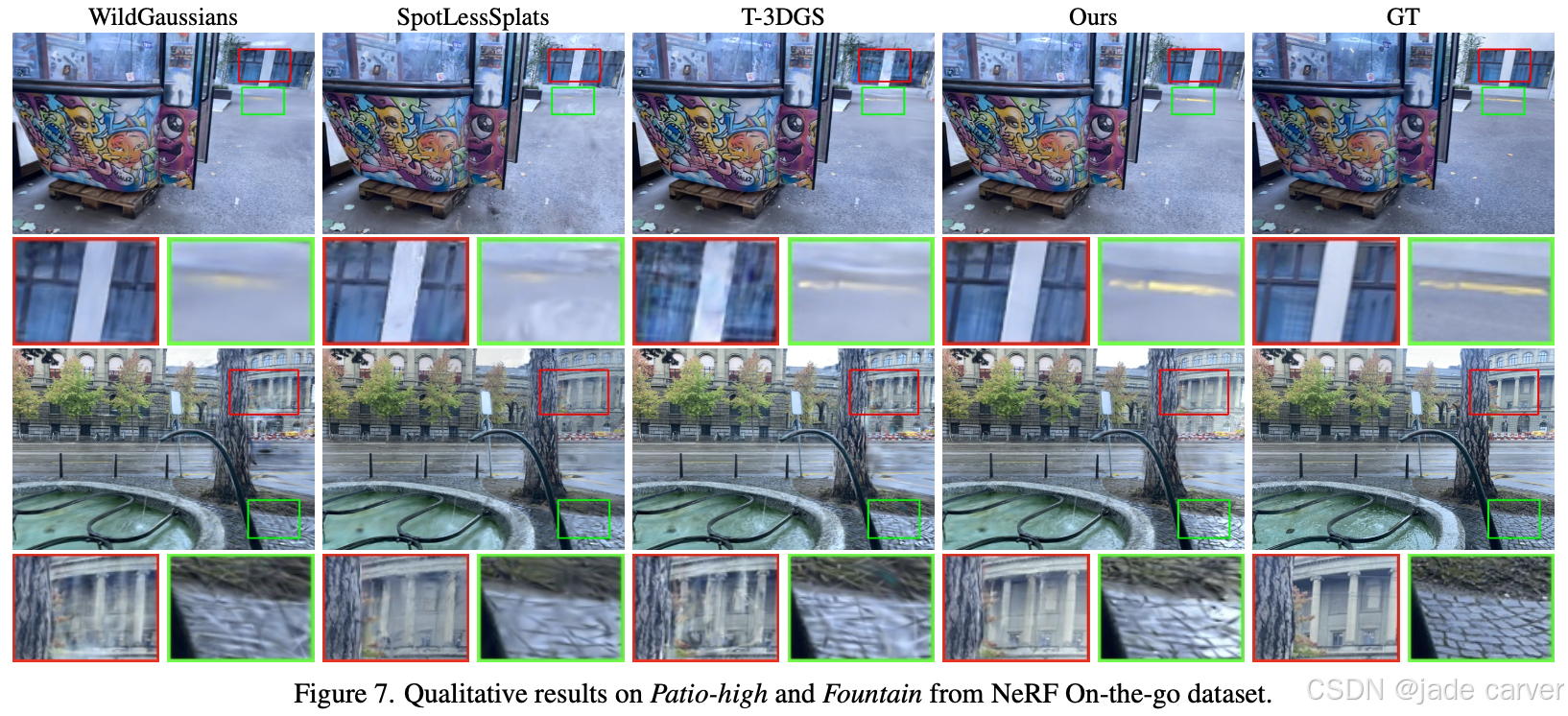
如圖7所示,基線方法存在明顯偽影,而本方法通過延遲高斯增長與尺度級聯掩碼自舉的協同設計,成功消除了偽影并在細節重建(如Patio-high場景的窗戶和Fountain場景的建筑結構)方面展現出顯著優勢。
4.2. RobustNeRF Dataset
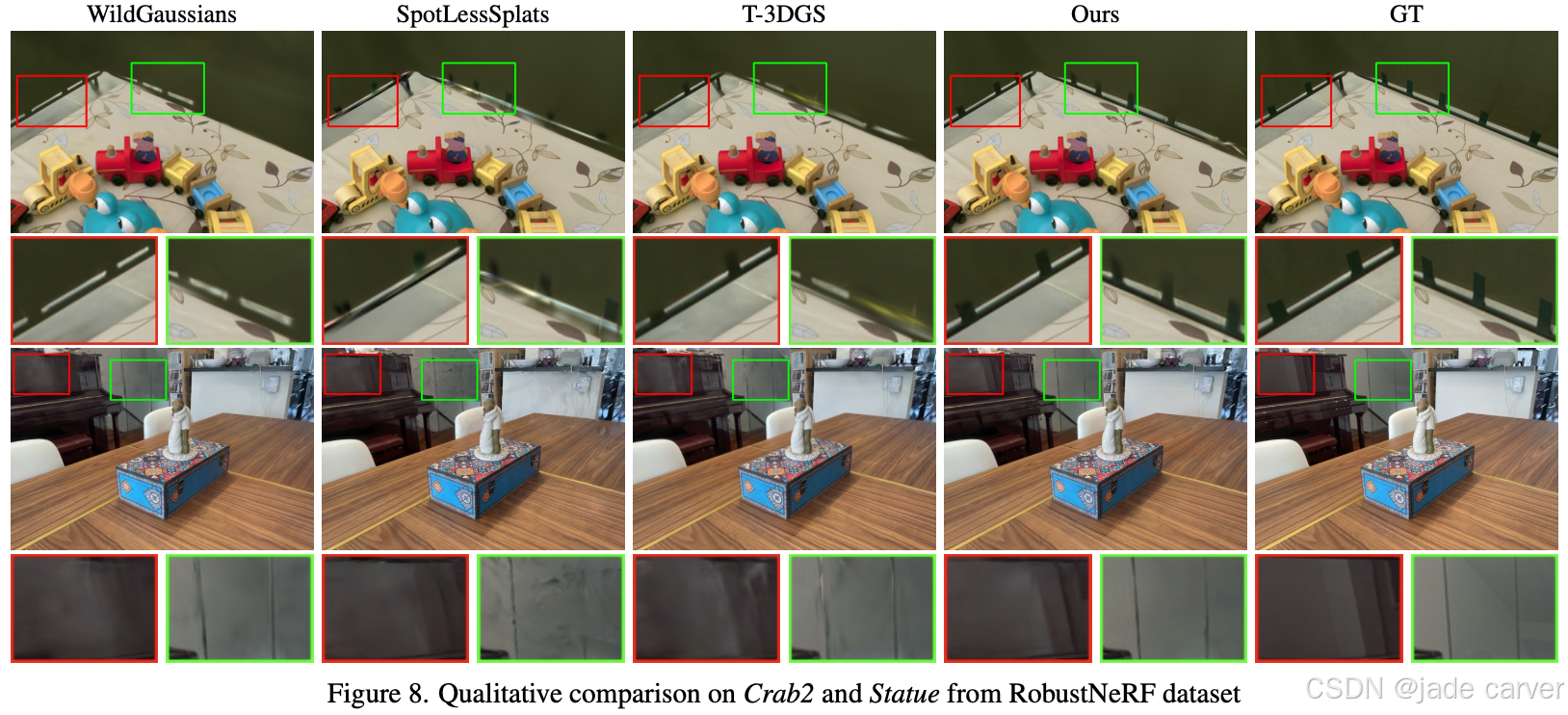
在RobustNeRF數據集上的進一步驗證表明:如表3所示,本方法在綜合指標上達到最優,雖然在Android場景的PSNR和SSIM略遜于基線,但仍保持競爭力,并在其余三個場景中顯著超越現有方法;圖8的定性對比顯示,本方法實現了無瞬態偽影且細節清晰的高質量重建效果。

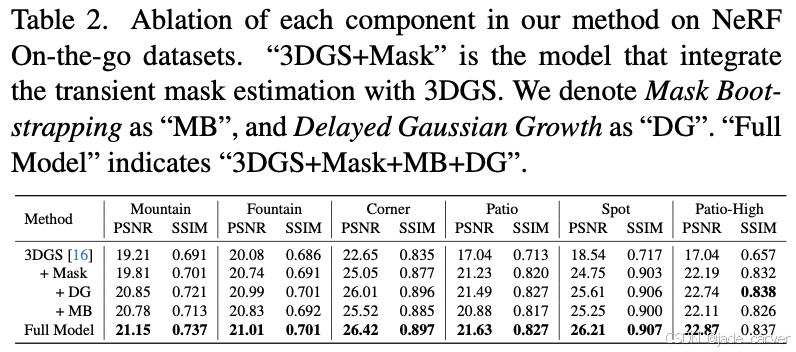
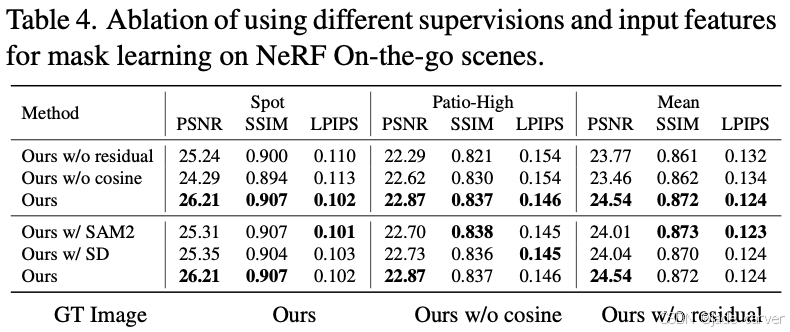
4.3. Ablation Study
4.4稀疏高斯初始化與高斯致密化的實驗
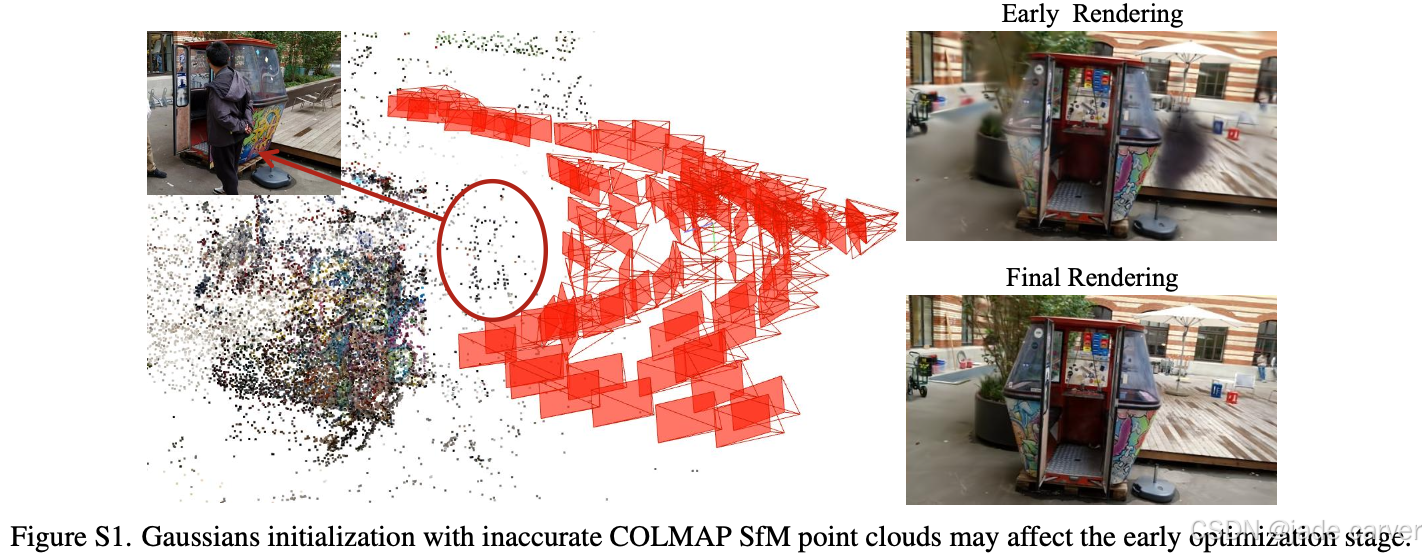
由于SfM基于多視角一致性重建稀疏點云,在移動前于多張捕獲圖像中保持靜止的瞬態物體會將噪聲點引入重建過程。因此,即便在高斯致密化開始前,3DGS也可能初步擬合這些瞬態區域。
如圖S1所示,在NeRF On-the-go數據集的Patio場景中,移動物體曾保持靜止狀態一段時間,導致COLMAP重建出與這些瞬態物體對應的噪聲點。這使得3DGS初始階段會擬合這些瞬態區域。
然而,隨著優化時間的延長,我們的瞬態掩碼估計會逐步消除這些偽影。這一現象表明,通過應用瞬態掩碼過濾動態區域,我們的方法能有效緩解噪聲初始化的影響,從而提升重建質量。
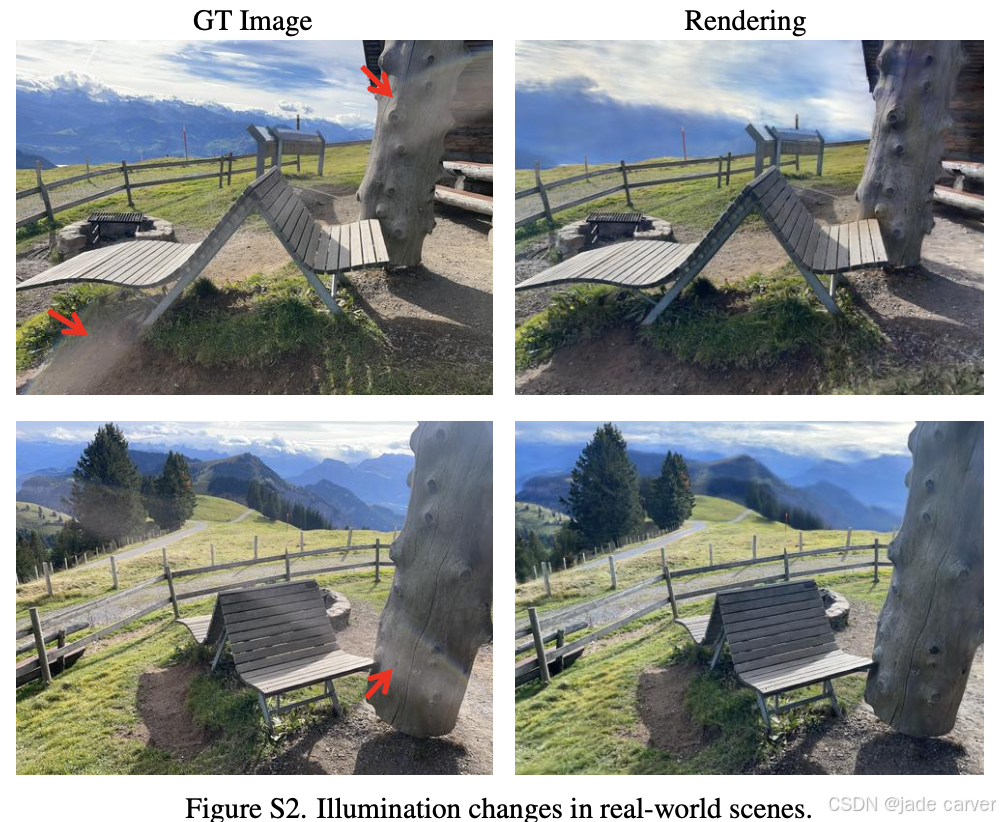
4.5光照變化問題
在真實世界環境中,光照變化也會引發多視角不一致性,導致漂浮偽影。本研究主要針對瞬態物體干擾,但由于缺乏顯式光照模型(圖S2),當場景中出現劇烈光照變化時,我們的方法無法正確建模真實光照變化。將光照建模納入現有框架是未來工作的重要方向,這將有助于處理更復雜的戶外數據集。
4.6 Runtime Evaluation










)


)






