導讀:
隨著移動機器人在工業自動化、特種作業及智能服務領域的廣泛應用,其路徑規劃能力越來越依賴機器人操作系統ROS2的通信性能。ROS2通過去中心化架構與數據分發服務中間件顯著提升了系統可靠性,但動態復雜環境中路徑規劃對通信延遲、帶寬及穩定性的嚴苛要求,使中間件性能成為影響實時規劃精度的關鍵瓶頸。近年來針對DDS、Zenoh等中間件的優化研究大量涌現,但仍缺乏對多協議多場景性能指標的跨維度系統性總結。本文綜述了近年來核心研究成果,深入剖析了ROS2中間件從通用架構向場景定制化設計的轉型趨勢;論證了路徑規劃與通信服務質量的深度耦合機制;總結了嵌入式協同與邊緣智能的系統級優化機制。文末提出了目前研究還存在的一些問題。
作者信息:
趙 鵬,?朱克佳:廣州軟件學院電子信息與控制工程學院,廣東 廣州
正文
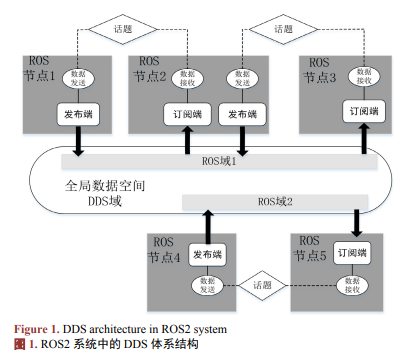
隨著機器人技術在工業自動化、特種作業及智能服務領域的廣泛應用,移動機器人的路徑規劃能力已成為其自主導航的核心支撐。機器人操作系統2 (Robot Operating System 2, ROS2)作為新一代分布式通信框架,通過數據分發服務(Data Distribution Service, DDS)中間件(ROS2系統中的DDS體系結構如圖1所示)實現了去中心化通信,顯著提升了系統的可靠性和擴展性。然而,在動態復雜環境中路徑規劃算法對通信延遲、帶寬和可靠性的敏感性,使ROS2中間件性能成為制約規劃效能的關鍵因素。
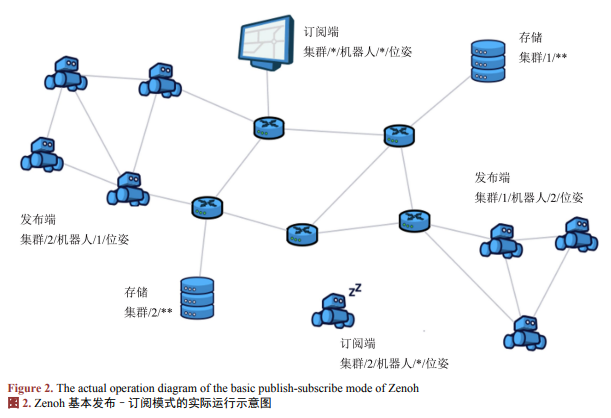
這一挑戰催生了輕量化協議的革命性突破,Zenoh協議(Zero Overhead Network Protocol, Zenoh),其實際運行示意圖如圖2所示,Zenoh基本發布–訂閱模式,旨在統一數據在傳輸、存儲與分布式計算場景下的數據抽象,憑借5字節協議頭與發布–訂閱、地理分布式存儲和查詢融合機制,在資源受限場景下將端到端延遲顯著降低,數據開銷明顯壓縮,其性能優勢在邊緣計算架構中尤為凸顯。
同時國內研究團隊在嵌入式實時適配領域取得顯著進展,高華實現了極端資源受限環境Micro XRCE-DDS (eXtreme Resource-Constrained Environment, XRCE)在實時操作系統NuttX上的部署;而董利邦通過雙重創新,定制服務質量QoS (QualityofService, QoS)通道與基于以數據為中心的發布–訂閱模型DCPS (Data-Centric Publish-Subscribe, DCPS)優化,提高了節點間的數據交換效率,實現了多協議數據傳輸,增強了數據交互的靈活性。這些突破與算法–中間件的深度協同形成呼應,李冰鑫提出的全局信息已知情況下的混沌優化自適應螢火蟲路徑規劃算法能夠有效縮短全局路徑長度,減少收斂時間,對機器人路徑規劃的質量和效率具有顯著的影響;徐永成提出了深度確定性策略梯度算法(Deep Deterministic Policy Gradient, DDPG)的改進版I-DDPG (Improved-DDPG)加快了訓練流程,減少了訓練過程中的不穩定因素,所得出的規劃路徑更短。雖然進展顯著,但當前研究仍存不足與改進空間,如動態環境實時性驗證仍需深化、資源受限場景適配有待強化等等。
2. ROS2中間件架構的演進與性能特征
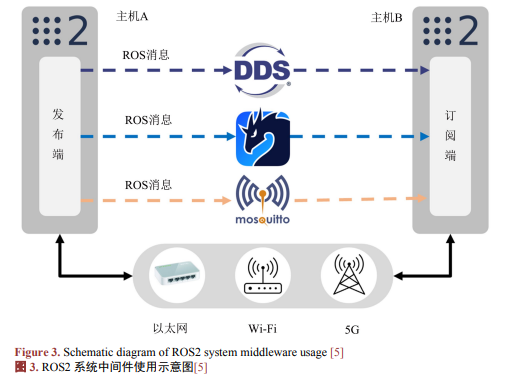
近年來研究表明,ROS2中間件架構已從通用型DDS實現轉向場景定制化設計,ROS2系統中間件使用示意圖如圖3所示。
3. 路徑規劃算法與中間件的深度耦合機制
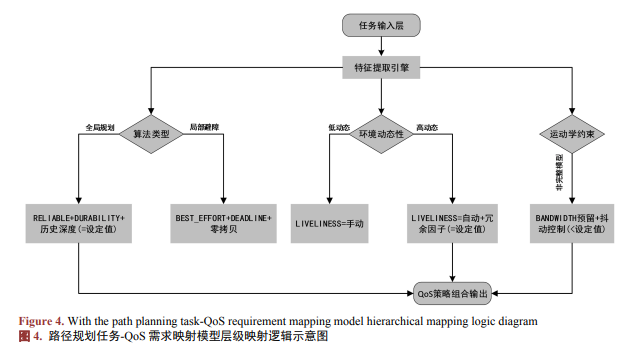
縱觀近年研究,我們可以定義一個移動機器人路徑規劃任務-QoS需求的映射模型,如圖4路徑規劃任務-QoS需求映射模型層級映射邏輯示意圖所示,該模型通過解構路徑規劃任務的算法類型、環境動態性、機器人運動學約束等多維特征,建立與通信數據流QoS策略的定量映射關系。其核心在于根據任務感知的全局規劃算法或局部避障算法動態適配機制、環境動態性、機器人運動學約束等因素,最終輸出分層QoS策略組合,實現通信資源與算法需求的最優匹配。
4. 嵌入式協同與邊緣智能的系統級優化機制
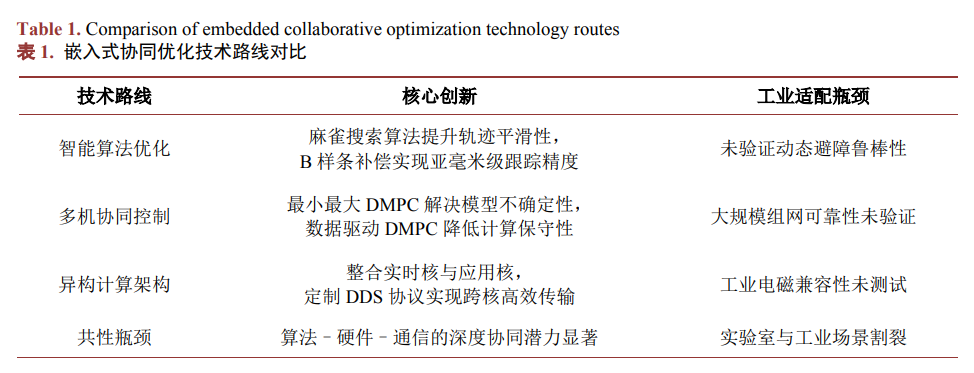
當前嵌入式協同與邊緣智能優化雖在算法–硬件協同層面取得突破,卻因工業場景驗證缺失與跨模態仲裁機制空白而面臨可靠性瓶頸。嵌入式協同優化技術路線對比如表1所示,這些系統性短板亟待通過動態QoS引擎、實時微內核架構及語義通信范式的創新實現范式躍遷,從而支撐高動態環境下“感知–決策–控制”鏈路的極致魯棒性。
5. 創新方向與技術展望
綜合分析,未來突破將聚焦三個維度:在動態適應性方面,環境感知的QoS引擎成為關鍵,需開發帶寬–延遲–可靠性的自適應調節算法,結合李宏提出的延遲預測模型,實現復雜場景的魯棒控制。嵌入式方向,高華與王文重的研究指向ROS2-RTOS微內核架構,需解決實時任務調度與內存保護的矛盾,尤其針對Cortex-M系列微控制器的資源約束優化。安全領域則需融合TEE可信執行環境與數據分發機制,建立輕量化認證協議。值得關注的是,命名數據網絡NDN (Named Data Networking, NDN)與ROS2的語義融合可能重構通信范式,通過命名數據路由替代傳統地址尋址,預計可以大大減少協議轉換開銷。這些創新將推動移動機器人在智能制造、特種環境作業等場景實現從“功能實現”到“極致可靠”的跨越。
基金項目:
廣州軟件學院科研項目(KY202411):基于ROS系統室內移動機器人的路徑規劃技術研究。
更多內容請點擊原文鏈接:https://doi.org/10.12677/csa.2025.158197



)
![學習:JS[8]本地存儲+正則表達式](http://pic.xiahunao.cn/學習:JS[8]本地存儲+正則表達式)



![[學習] CORDIC算法詳解:從數學原理到反正切計算實戰](http://pic.xiahunao.cn/[學習] CORDIC算法詳解:從數學原理到反正切計算實戰)








的定義與使用)

)