倫敦大學學院博士生袁方正在建造多模態傳感器鉆機,以探索自動駕駛的未來。
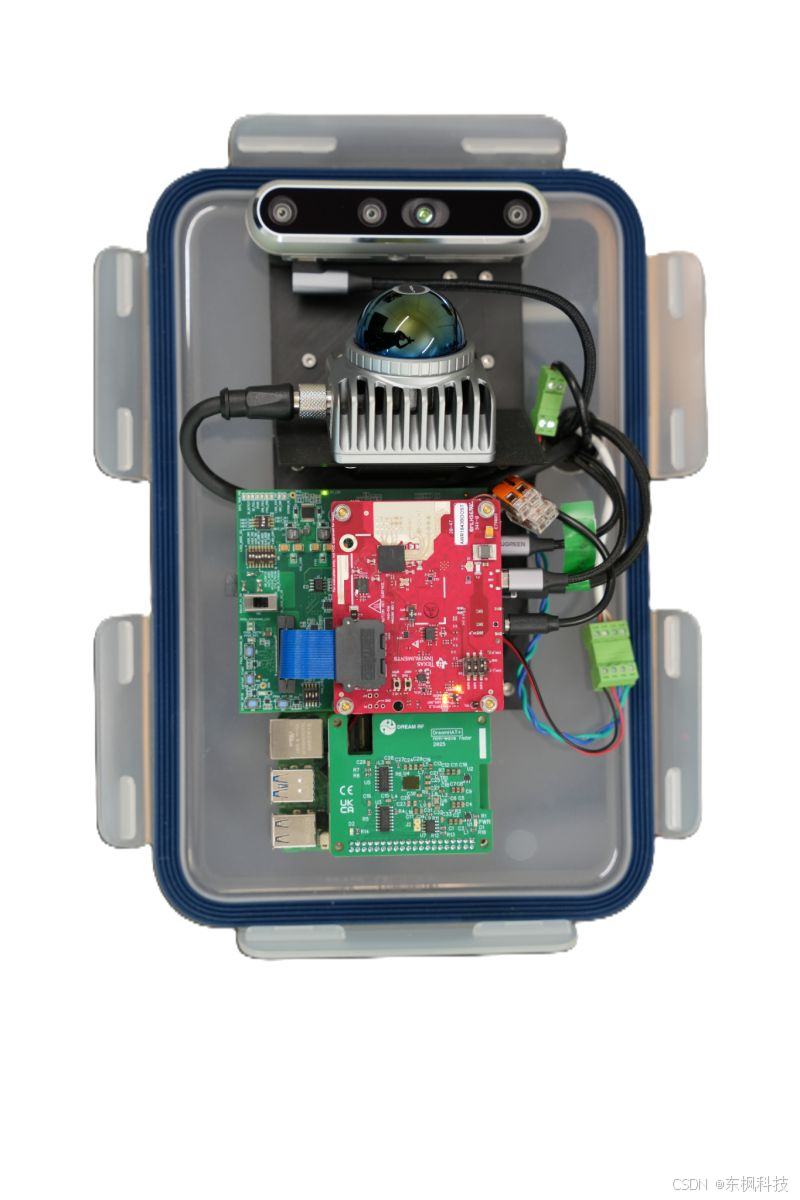
他的最新設置匯集了一套尖端傳感器:
📡 60 GHz 雷達(用于 Raspberry Pi 的 DreamHAT+)DreamRF
📷 RGB 深度攝像頭 (RealSense D455) 英特爾
🟢 3D 激光雷達 (MID-360) Livox Tech
📶 76–81 GHz 雷達 (AWR1843Boost) 德州儀器
這些多樣化的傳感模式將使我們能夠研究數據融合技術,這些技術可以解鎖更強大、更可靠的場景理解——尤其是在具有挑戰性的駕駛環境中。
我們的想法是使用基于物理的仿真和深度學習的混合,從現有的 LiDAR 數據生成合成毫米波雷達信號。這種方法可以為缺乏雷達數據的自動駕駛數據集注入新的活力,擴大其實用性并加速以雷達為中心的感知研究。
這項工作強調了像 DreamHAT+ 這樣的經濟實惠的毫米波雷達如何與其他傳感器集成,以探索智能交通領域的下一代應用。

——graph之檢查點)





)



 部署Doris)



,解決類別不平衡問題,案例:邏輯回歸 信用卡欺詐檢測)



