1. usd導出urdf失敗
在isasssim的仿真中的 robotiq 2f夾爪,首先目前4.5asset里面的usd不能直接轉urdf,因為模型中存在 “閉環連接”,即某個部件(或關節)同時與兩個及以上的父部件相連,形成類似 “三角形” 的循環結構
即usd導出urdf失敗
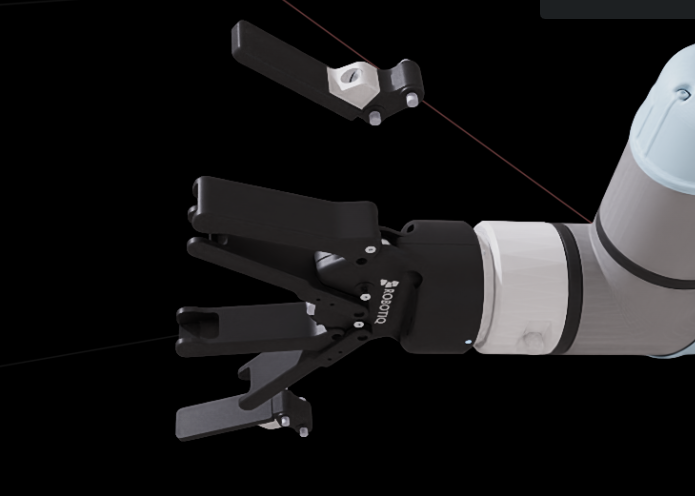
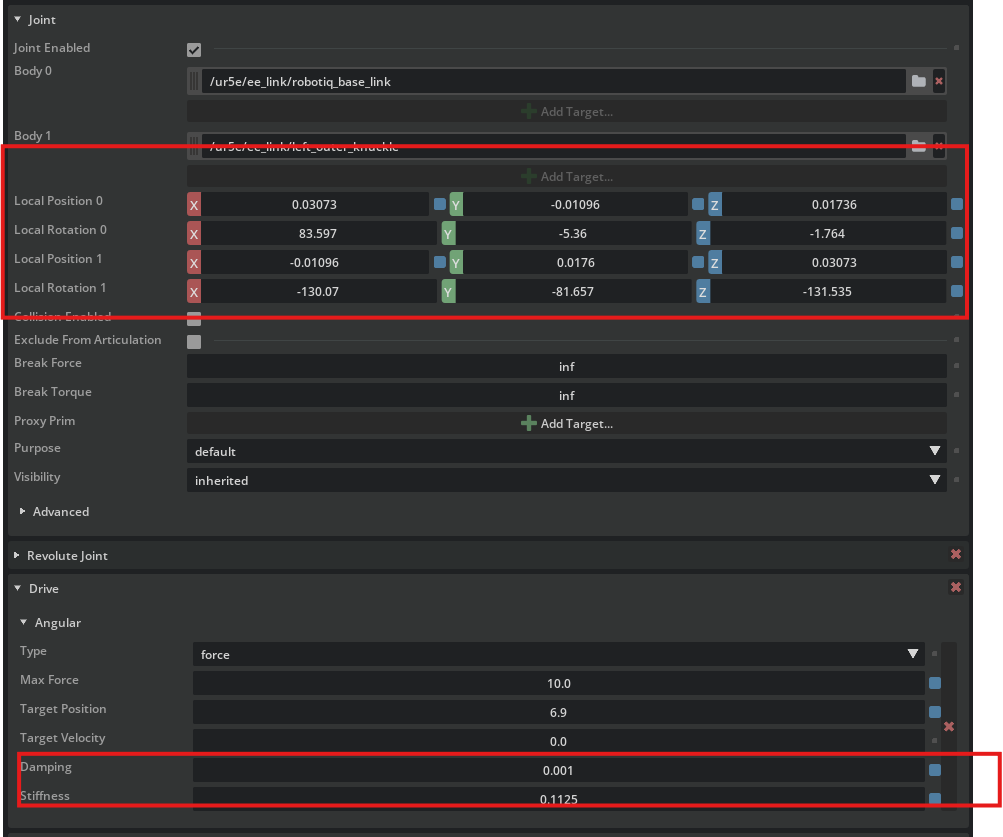
2. 夾爪不動,夾爪散架
修改了drive的pd參數,導致夾爪不動
修改了夾爪內部的位置關系,導致散架(很可能,無法修復了,只能用原版覆蓋了
在isasssim的仿真中的 robotiq 2f夾爪,首先目前4.5asset里面的usd不能直接轉urdf,因為模型中存在 “閉環連接”,即某個部件(或關節)同時與兩個及以上的父部件相連,形成類似 “三角形” 的循環結構
即usd導出urdf失敗
修改了drive的pd參數,導致夾爪不動
修改了夾爪內部的位置關系,導致散架(很可能,無法修復了,只能用原版覆蓋了
本文來自互聯網用戶投稿,該文觀點僅代表作者本人,不代表本站立場。本站僅提供信息存儲空間服務,不擁有所有權,不承擔相關法律責任。 如若轉載,請注明出處:http://www.pswp.cn/web/91348.shtml 繁體地址,請注明出處:http://hk.pswp.cn/web/91348.shtml 英文地址,請注明出處:http://en.pswp.cn/web/91348.shtml
如若內容造成侵權/違法違規/事實不符,請聯系多彩編程網進行投訴反饋email:809451989@qq.com,一經查實,立即刪除! ? | Pokedex(寶可夢圖鑒))


















