在PyTorch中,nn.BatchNorm1d(128) 的作用是對 一維輸入數據(如全連接層的輸出或時間序列數據)進行批標準化(Batch Normalization),具體功能與實現原理如下:
1. 核心作用
- 標準話數據分布
對每個批次的輸入數據進行歸一化,使其均值接近0、方差接近1,公式如下:
x^=x?μbatchσbatch2+e\hat{\mathbf{x}}=\frac{\mathbf{x}-\mathbf{\mu}_{batch}}{\sqrt{\sigma^{2}_{batch}+e}}x^=σbatch2?+e?x?μbatch??
其中:- μbatch\mu_{batch}μbatch?:當前批次的均值
- σbatch\sigma_{batch}σbatch?:當前批次的方差
- eee: 防止除零的小常數(默認1e-5)
- 可學習的縮放與偏移:
通過參數γ\gammaγ (縮放)和 β\betaβ(偏移)保留模型的表達能力:
y=γx^+β y = \gamma \hat{\mathbf{x}}+\beta y=γx^+β
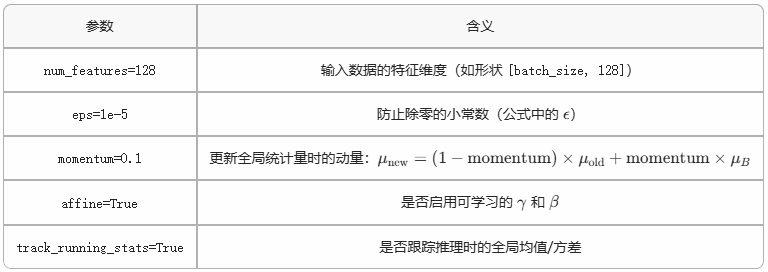
2. 參數解釋
3. 全連接網絡應用場景
import torch.nn as nnmodel = nn.Sequential(nn.Linear(64, 128),nn.BatchNorm1d(128), # 對128維特征歸一化nn.ReLU(),nn.Linear(128, 10)
)
數學效果:
若輸入特征x∈Rm×128\mathbf{x}\in \mathbb{R}^{m\times128}x∈Rm×128,輸出yyy滿足:
E[y:j]≈0,Var(y:,j)≈1
\mathbb{E}[y_{:j}]\approx0, Var(y_{:,j})\approx1
E[y:j?]≈0,Var(y:,j?)≈1
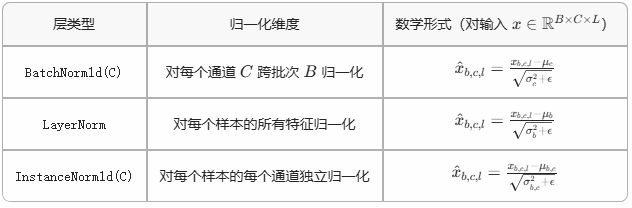
4. 與其他歸一化層的對比
5. 訓練與推理的差異
- 訓練階段
使用當前批次的統計量μbatch\mu_{batch}μbatch?和σbatch2\sigma_{batch}^2σbatch2?,并更新全局統計量:
μrunnning←μrunning×(1?momentum)+μbatch×momentum\mu_{runnning} \leftarrow \mu_{running}\times(1-momentum) + \mu_{batch}\times momentumμrunnning?←μrunning?×(1?momentum)+μbatch?×momentum - 推理階段(測試階段)
固定使用訓練積累的全局統計量μbatch\mu_{batch}μbatch?和σbatch2\sigma_{batch}^2σbatch2?
KaTeX parse error: Undefined control sequence: \sigmma at position 54: …unning}}{\sqrt{\?s?i?g?m?m?a?^{2}_{running}+…
6. 代碼戰爭數學性質
import torch# 模擬輸入(batch_size=4, 128維特征)
x = torch.randn(4, 128) * 2 + 1 # 均值1,方差4bn = nn.BatchNorm1d(128, affine=False) # 禁用γ和β
output = bn(x)print("輸入均值:", x.mean(dim=0).mean().item()) # ≈1
print("輸出均值:", output.mean(dim=0).mean().item()) # ≈0
print("輸入方差:", x.var(dim=0).mean().item()) # ≈4
print("輸出方差:", output.var(dim=0).mean().item()) # ≈1


:Spring Boot + AI + Vue3 + OSS + DashScope 構建多模態視覺理解平臺(附完整源碼))





:gst-rtcp-server安裝和部署實現簡單的rtsp-server服務器推流Demo)


)






