摘要:汽車四輪定位參數與懸架密切相關。汽車懸架對于車輛的行駛性能、安全性和舒適性至關重要。DTAS 3D提供了各類型懸架的公差仿真分析方法。
關鍵字:DTAS 3D、前后懸架、公差仿真分析、 運動耦合
一、懸架公差分析綜述
懸架是車身(或車架)與車輪(或車橋)中間的連接裝置的總稱,是汽車的重要組成部分。汽車懸架對于車輛的行駛性能、安全性和舒適性都至關重要,同時四輪定位參數與懸架密切相關,對車輛的正常行駛也起著關鍵作用。汽車在行駛過程中會遇到各種路面顛簸和不平,懸架系統通過彈簧、減震器等部件的協同工作,能夠有效地緩沖和吸收這些震動,減少車身的起伏和晃動,使乘客感受到更加平穩舒適的駕乘體驗。懸架系統對汽車的操縱穩定性起著關鍵作用。它能夠保持車輪與地面的良好接觸,使輪胎在各種行駛條件下都能有效地傳遞力和力矩。在轉彎、制動和加速時,懸架系統通過合理地分配車輪載荷,控制車身的姿態變化,確保汽車按照駕駛員的意圖行駛,提高行駛的安全性和操控性。
懸架公差仿真分析目標是各公差對四輪定位參數的影響。前后輪的四輪參數包括車輪外傾、前束、前輪還包括主銷傾角等。
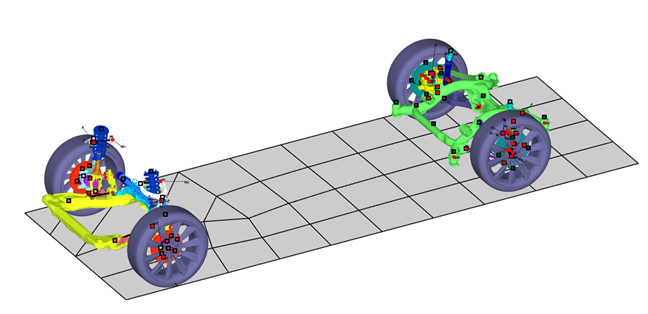
DTAS 3D兩種方式進行底盤懸架公差仿真分析,一是可以通過建立面向底盤的靜態虛擬裝配,如多約束裝配、旋轉裝配等,將公差分析與運動分析耦合仿真分析。第二種方式是建立各種運動副及驅動。兩種方式雖然建模方式略有差異,但本質及結果是一致的。
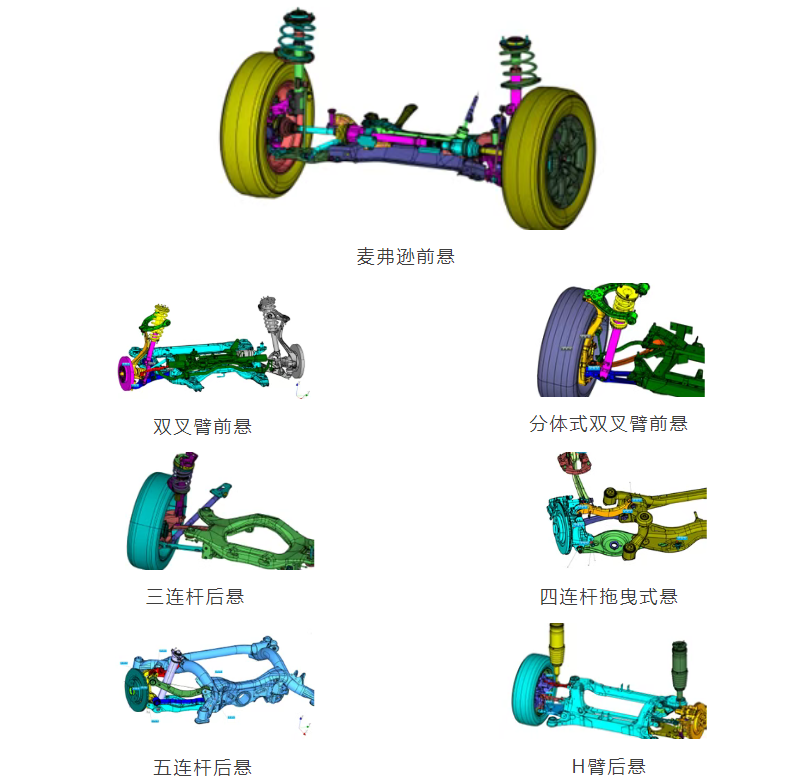
DTAS 3D兩種建模思路可以解決以下懸架形式,麥弗遜、雙叉臂、三連桿、四連桿、五連桿、H臂等。麥弗遜前懸是經典的前懸形式,由于麥弗遜前懸的一些弊端,在麥弗遜的基礎上逐步衍生出了雙叉臂前懸等。將麥弗遜前懸的結構應用在后懸上為三連桿后懸,俗稱筷子懸架,其結構布置簡單,成本低廉。隨著對操控的要求越來越高,在三連桿的懸架形式上逐步發展出了四連桿(拖曳式刀臂懸架)、五連桿、H臂等懸架。本文主要討論雙叉臂前懸與五連桿后懸的建模方法。
如圖所示:
二、雙叉臂前懸與五連桿后懸的公差分析
建模思路:
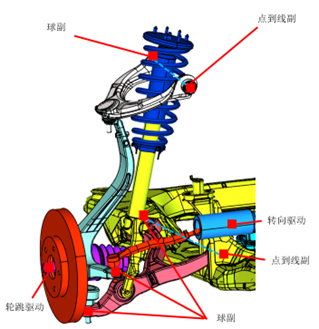
雙叉臂前懸主要建立如下的運動副,包括2個驅動副,一個是輪跳的,另一個是轉向驅動。
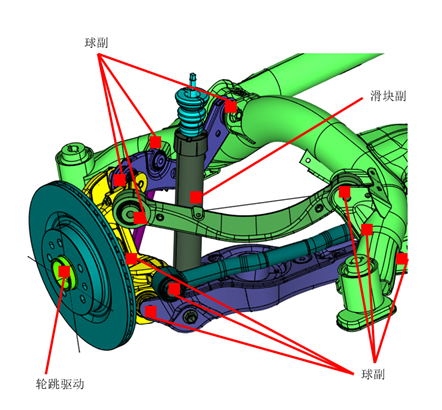
五連桿后懸懸架由于有5個連桿,所以與車架轉向節共有10個球副,減震器等可以建立滑塊副、球副等。輪跳驅動建立在轉向節上。
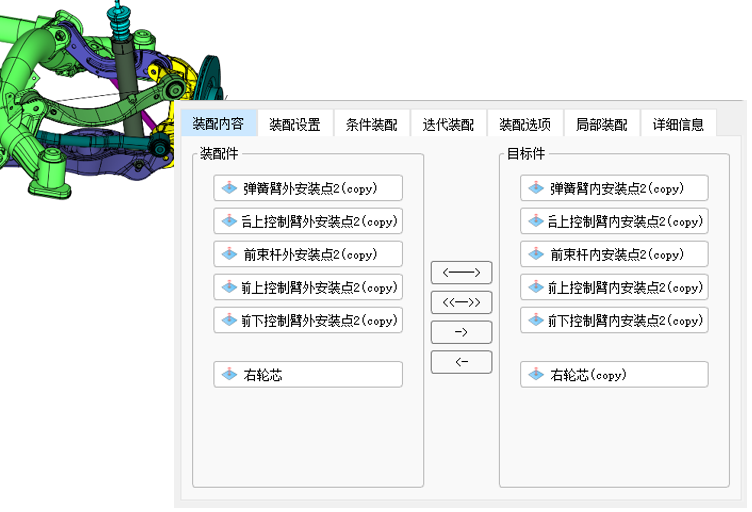
五連桿后懸除了運動副建模以外,也可以采用多約束裝配的建模方法,如下圖所示。使用多約束裝配控制轉向節安裝點與副車架安裝點之間的距離,最終控制轉向節的最終姿態。多約束裝配不僅適用于五連桿后懸,也適用于其它各類型的前后懸架。多約束裝配相比運動副建模求解速度快,建模簡單等優點。
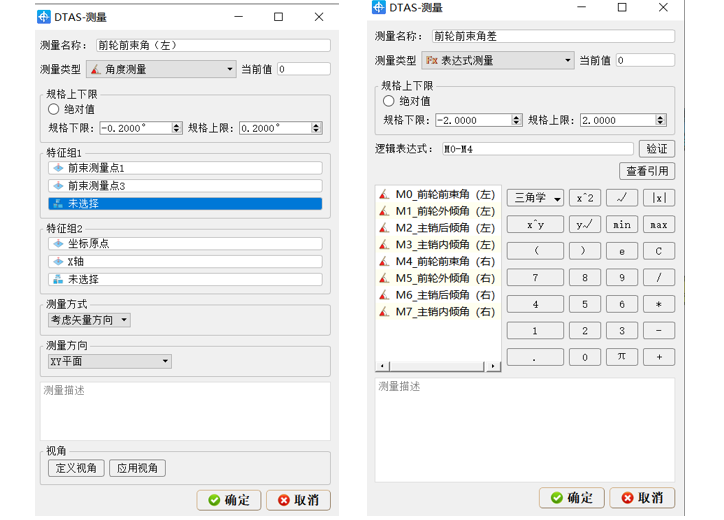
虛擬測量:
在DTAS 3D中可以建立各種虛擬測量,包括前束角、外傾角、前輪主銷內傾、后傾角以及前輪左右前束角之差或之和等。
仿真結果:
運動軌跡分析,車輪在不同狀態下,如轉向角度、輪跳高度下的各狀態軌跡分析。
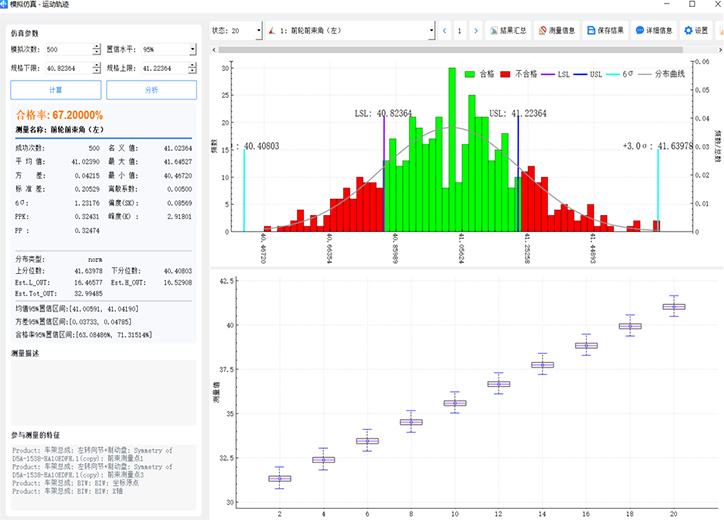
各個四輪參數的波動情況:
貢獻度、傳遞系數分析等,各個公差對四輪參數的靈敏度及貢獻度,為后續的優化指明方向。

仿真動畫:
雙叉臂懸架仿真動畫
DTAS 3D多約束裝配助力懸架公差分析及尺寸鏈計算:五連桿懸架仿真動畫
其它懸架的公差仿真動畫:
麥弗遜前懸仿真動畫
雙叉臂前懸仿真動畫
三連桿后懸仿真動畫
H臂懸架仿真動畫
三、結論與展望
DTAS 3D滿足了汽車各類懸架的公差仿真分析的需求,并提供靜態與運動副多種建模方法,為汽車操控舒適性分析保駕護航。機構的各類為柔性襯套,如何將機構運動、公差仿真、柔性仿真三者耦合是當前與未來懸架公差分析的一大挑戰。







?)

——使用Multisim軟件繪制邊沿觸發的D觸發器和JK觸發器)








)
