一、快慢指針的原理
定義:
????????快指針:每次移動兩步
? ? ? ? 慢指針:每次移動一步
終止條件:
? ? ? ? 當快指針到達鏈表末尾時停止
事件復雜度:
? ? ? ? 始終為O(n),僅需依次遍歷
空間復雜度:
? ? ? ? 僅需兩個指針變量
二、快慢指針的典型應用場景
1、首先制作一個鏈表的節點
?
#include <iostream>
#include <vector>struct ListNode {int val;ListNode* next;ListNode(int x) :val(x), next(nullptr){}ListNode(int x, ListNode *_next):val(x),next(_next){}
};//傳入列表生成list鏈
ListNode* makeNodeList(std::vector<int> vec)
{ListNode* outNode = nullptr;for (int i = vec.size() - 1; i >= 0 ; i--){outNode = new ListNode(vec[i],outNode);}return outNode;}//遍歷輸出鏈表
void traverseNodeList(ListNode* node)
{while (node){std::cout << node->val << " ";node = node->next;}std::cout << std::endl;
}//回收資源
void reclaim(ListNode* node)
{if (node->next){reclaim(node->next);}delete node;
}int main()
{std::vector<int> vec{ 1,2,3,4,5 };ListNode *node = makeNodeList(vec);traverseNodeList(node);reclaim(node);return 0;
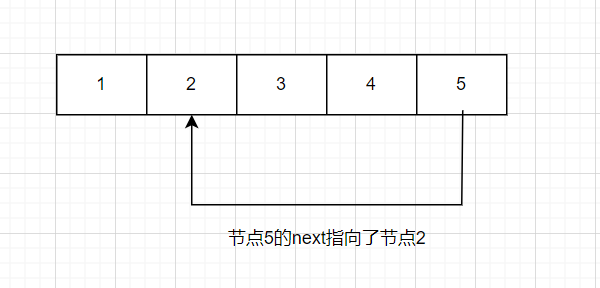
}2、檢測鏈表是否有環
代碼如下:
bool haveLoop(ListNode* node)
{ListNode* fast = node;ListNode* slow = node;while (fast != nullptr && fast->next != nullptr){fast = fast->next->next;slow = slow->next;if (fast == slow){return true; //快指針追上了滿指針,有環}}return false;
}int main()
{ListNode* node5 = new ListNode(5);ListNode* node4 = new ListNode(4, node5);ListNode* node3 = new ListNode(3, node4);ListNode* node2 = new ListNode(2, node3);ListNode* node1 = new ListNode(1, node2);node5->next = node2;if (haveLoop(node1)){std::cout << "有環" << std::endl;}else {std::cout << "沒環" << std::endl;}return 0;
}3、找到鏈表的中間節點
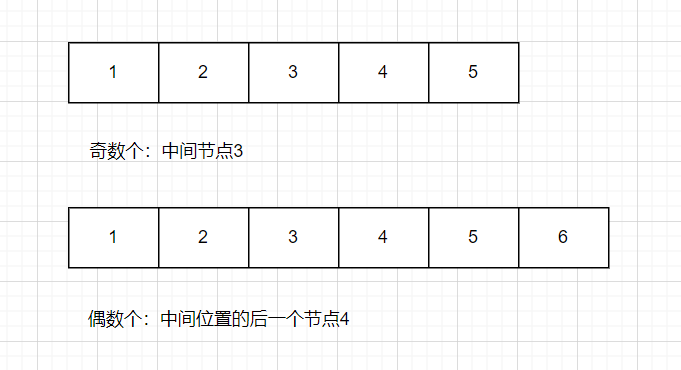
ListNode* middileNode(ListNode* node)
{ListNode *fast = node, *slow = node;while (fast && fast->next) { //如果fast的next為nullptr,則下面的next->next就找不第二個next了fast = fast->next->next;slow = slow->next;}return slow;
}int main()
{std::vector<int> vec{ 1,2,3,4,5 };ListNode *node = makeNodeList(vec);ListNode *midNode = middileNode(node);std::cout << "奇數個中間節點是" << midNode->val << std::endl;std::vector<int> vec2{ 1,2,3,4,5,6 };ListNode* node2 = makeNodeList(vec2);ListNode* midNode2 = middileNode(node2);std::cout << "偶數個中間節點是" << midNode->val << std::endl;return 0;
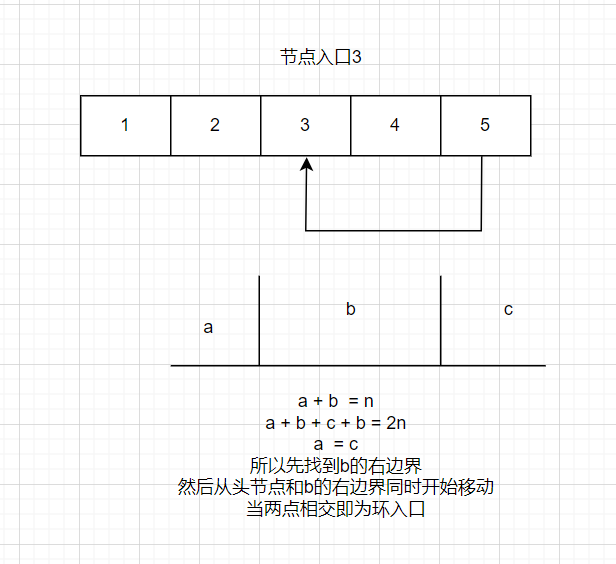
}4、尋找鏈表的環入口
代碼如下:
(因為用到了前面判斷是否時環的函數,所以代碼都放這里了)
#include <iostream>
#include <vector>struct ListNode {int val;ListNode* next;ListNode(int x) :val(x), next(nullptr){}ListNode(int x, ListNode *_next):val(x),next(_next){}
};//傳入列表生成list鏈
ListNode* makeNodeList(std::vector<int> vec)
{ListNode* outNode = nullptr;for (int i = vec.size() - 1; i >= 0 ; i--){outNode = new ListNode(vec[i],outNode);}return outNode;}//遍歷輸出鏈表
void traverseNodeList(ListNode* node)
{while (node){std::cout << node->val << " ";node = node->next;}std::cout << std::endl;
}//回收資源
void reclaim(ListNode* node)
{if (node->next){reclaim(node->next);}delete node;
}bool haveLoop(ListNode* node)
{ListNode* fast = node;ListNode* slow = node;while (fast != nullptr && fast->next != nullptr){fast = fast->next->next;slow = slow->next;if (fast == slow){return true; //快指針追上了滿指針,有環}}return false;
}ListNode* middileNode(ListNode* node)
{ListNode *fast = node, *slow = node;while (fast && fast->next) { //如果fast的next為nullptr,則下面的next->next就找不第二個next了fast = fast->next->next;slow = slow->next;}return slow;
}ListNode* entranceNode(ListNode* node)
{if (!haveLoop(node)){return nullptr; //如果不含有環路,返回空指針}ListNode* fast = node, * slow = node;while (fast && fast->next){fast = fast->next->next;slow = slow->next;if (fast == slow){break;}}slow = node;while (fast != slow){fast = fast->next;slow = slow->next;}return slow;
}int main()
{ListNode* node5 = new ListNode(5);ListNode* node4 = new ListNode(4, node5);ListNode* node3 = new ListNode(3, node4);ListNode* node2 = new ListNode(2, node3);ListNode* node1 = new ListNode(1, node2);node5->next = node3;ListNode* node = entranceNode(node1); //Node節點std::cout << "入口節點值為" << node->val << std::endl;return 0;
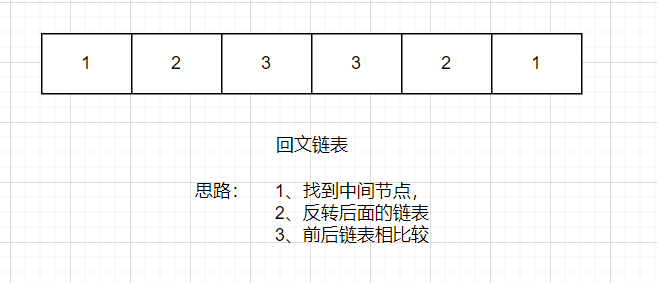
}5、判斷回文鏈表
?
代碼如下:
#include <iostream>
#include <vector>struct ListNode {int val;ListNode* next;ListNode(int x) :val(x), next(nullptr){}ListNode(int x, ListNode *_next):val(x),next(_next){}
};//傳入列表生成list鏈
ListNode* makeNodeList(std::vector<int> vec)
{ListNode* outNode = nullptr;for (int i = vec.size() - 1; i >= 0 ; i--){outNode = new ListNode(vec[i],outNode);}return outNode;}//遍歷輸出鏈表
void traverseNodeList(ListNode* node)
{while (node){std::cout << node->val << " ";node = node->next;}std::cout << std::endl;
}//回收資源
void reclaim(ListNode* node)
{if (node->next){reclaim(node->next);}delete node;
}bool haveLoop(ListNode* node)
{ListNode* fast = node;ListNode* slow = node;while (fast != nullptr && fast->next != nullptr){fast = fast->next->next;slow = slow->next;if (fast == slow){return true; //快指針追上了滿指針,有環}}return false;
}ListNode* middileNode(ListNode* node)
{ListNode *fast = node, *slow = node;while (fast && fast->next) { //如果fast的next為nullptr,則下面的next->next就找不第二個next了fast = fast->next->next;slow = slow->next;}return slow;
}ListNode* entranceNode(ListNode* node)
{if (!haveLoop(node)){return nullptr; //如果不含有環路,返回空指針}ListNode* fast = node, * slow = node;while (fast && fast->next){fast = fast->next->next;slow = slow->next;if (fast == slow){break;}}slow = node;while (fast != slow){fast = fast->next;slow = slow->next;}return slow;
}bool isSymmeNode(ListNode* node)
{//用前面的函數找到中間節點ListNode* midNode = middileNode(node);//反轉中間節點后面的節點// 321 -> 123// 3 2 1// 3 21// 2 3 1// 1 2 3ListNode* temp;ListNode* Lnode = midNode;ListNode* Rnode = nullptr;while (Lnode){temp = Lnode->next;Lnode->next = Rnode; //讓先放進來的值朝著后面排Rnode = Lnode;Lnode = temp;}//第三步、比較前后的值是否相同while(Rnode){if (node->val != Rnode->val){return false;}else {node = node->next;Rnode = Rnode->next;}}return true;
}int main()
{std::vector<int> vec = { 1,2,3,3,2,1 };ListNode* Node = makeNodeList(vec);if (isSymmeNode(Node)){std::cout << "是回文鏈" << std::endl;}else {std::cout << "不是回文鏈" << std::endl;}return 0;
}6、找到鏈表的倒數第K個節點
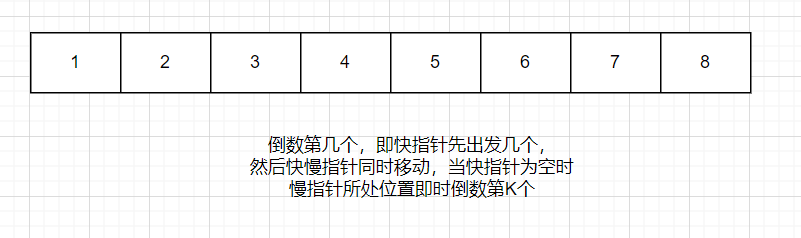
ListNode* getKthFromEnd(ListNode* node, int k)
{ListNode* fast = node, * slow = node;for (int i = 0; i < k; i++){if (fast && fast->next){fast = fast->next;}else {return nullptr;}}while (fast){fast = fast->next;slow = slow->next;}return slow;
}int main()
{std::vector<int> vec = { 1,2,3,4,5,6 };ListNode* Node = makeNodeList(vec);std::cout << "倒數第3節點的值是" << getKthFromEnd(Node, 3)->val << std::endl;return 0;
}三、快慢指針在實際開發中的應用
????????下面是DeepseeK給出的,個人認為是從判斷環,找中點,業務需求速率不同這三個角度演化。還沒實踐過。后面有實踐應該會貼鏈接在這里。
????????PS:夜已深,學生時期聽的歌真有品味啊,當世界年輕時
1.?資源管理與循環檢測
-
場景:在內存管理、文件系統或網絡協議中,需要檢測資源引用是否形成循環依賴。
-
示例:
-
垃圾回收(GC):某些垃圾回收算法需要檢測對象之間的循環引用(如標記-清除算法)。通過快慢指針可以高效判斷對象引用鏈中是否存在環,避免內存泄漏。
-
文件系統的符號鏈接:檢測符號鏈接是否形成環(如?
ln -s file1 file2; ln -s file2 file1),避免程序陷入死循環遍歷。
-
-
2.?數據結構的維護與優化
-
場景:在自定義鏈表結構或緩存系統中,需要高效操作鏈表。
-
示例:
-
緩存淘汰策略:在實現類似 LRU(最近最少使用)緩存時,若需手動管理鏈表(而非使用現成庫),快慢指針可用于快速定位中間節點或批量調整緩存順序。
-
鏈表合并與分割:在分布式系統中合并多個有序鏈表(如日志合并),通過快慢指針找到中點后分治處理(類似歸并排序)。
-
-
3.?網絡與協議處理
-
場景:處理網絡數據包的順序或超時檢測。
-
示例:
-
心跳檢測:在長連接中,若用鏈表維護心跳包的時間戳,快指針(高頻檢測)和慢指針(低頻統計)可協同判斷連接健康狀態。
-
數據包亂序重組:通過快慢指針分離已確認和待確認的數據包鏈表。
-
-
4.?并發與多線程編程
-
場景:在無鎖數據結構或任務調度中,檢測潛在的死鎖或競態條件。
-
示例:
-
任務隊列管理:在生產者-消費者模型中,快指針快速推進任務處理,慢指針統計未處理任務量,動態調整隊列負載。
-
死鎖檢測:若線程等待關系形成鏈表式依賴,快慢指針可輔助檢測循環等待(需結合線程調度器的元數據)。
-
-
5.?系統性能分析與調試
-
場景:在性能分析工具或調試器中,追蹤程序執行路徑。
-
示例:
-
調用鏈分析:在分布式追蹤系統(如 OpenTelemetry)中,若調用鏈因異常形成環(如 A→B→A),快慢指針可快速定位問題節點。
-
棧溢出檢測:通過快慢指針監控遞歸調用的深度(慢指針記錄常規檢查點,快指針快速探測棧增長)。
-
-
6.?游戲與圖形處理
-
場景:處理動態更新鏈表結構的數據(如動畫幀、物理引擎中的剛體鏈表)。
-
示例:
-
動畫幀同步:快指針快速遍歷待渲染幀,慢指針標記已確認同步的幀節點,避免丟幀或重復渲染。
-
碰撞檢測優化:將物體按空間分組成鏈表,快慢指針協助快速篩選待檢測的物體集合。
-
-
7.?數據庫與存儲引擎
-
場景:在存儲引擎的索引結構(如跳表、B+樹葉子節點鏈表)中優化查詢。
-
示例:
-
跳表(Skip List)維護:快指針快速跨越高層索引,慢指針在底層鏈表同步移動,平衡查詢與更新效率。
-
范圍查詢優化:通過快慢指針快速定位查詢范圍的起點和終點。
-
-








:KNN原理及應用)

、嵌入(Embeddings)及潛空間(Latent space))







導致服務器面臨 RCE 風險)
