目錄
1.課題概述
2.系統仿真結果
3.核心程序與模型
4.系統原理簡介
4.1?單自由度磁懸浮減振器工作原理簡介
4.2?SIMMECHANICS工具箱
5.完整工程文件
1.課題概述
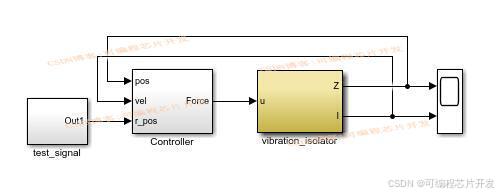
? ? ?基于SIMMECHANICS的單自由度磁懸浮隔振器PID控制系統simulink建模與仿真。其中,SIMMECHANICS是MATLAB仿真中的一個工具箱,同時結合SIMULINK、MATLAB的功能。利用SIMMECHANICS模塊框圖對機構運動進行建模和動態仿真。
2.系統仿真結果
運行完simulink文件后再運行ploter得到說明文檔的結果圖(操作視頻中遺漏了這個步驟)

??????? 從上面的仿真結果可知,當輸入測試信號為正弦的時候,對應的氣隙和電流響應為響應的正弦輸出。從而說明控制對象的正確性。
3.核心程序與模型
版本:Matlab2017b(提供Matlab2017b軟件下載鏈接)
110
4.系統原理簡介
? ? ? ?在現代工業和精密設備領域,振動控制至關重要。磁懸浮隔振器利用電磁力實現非接觸式隔振,相比傳統隔振方式具有無摩擦、壽命長、響應快等優勢。PID 控制作為一種經典且有效的控制策略,能實現對系統的精確調節。結合 SIMMECHANICS 工具,可直觀、高效地搭建單自由度磁懸浮隔振器 PID 控制系統的仿真模型,深入研究其工作原理和性能。
4.1?單自由度磁懸浮減振器工作原理簡介
研究如下結構的單自由度磁懸浮減振器:
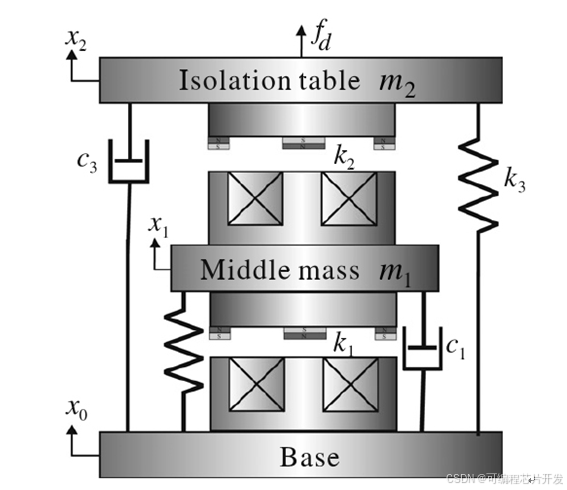
???????當地面存在擾動并作用到磁懸浮減振器的時候,如果擾動較小,那么避震系統將以比較緩慢的速度進行位移,產生壓縮或拉伸的效果,此時避震器的阻力只有來自機構內部的摩擦力,這種情況不考慮。如果擾動較大,避震器的阻力將增加,從阻力的作用效果劃分,阻力分為壓縮和回彈兩個部份,其中回彈阻力出現在減振器受底部擾動后的反彈過程,從而抵消來自底部的擾動,并減少來自底部擾動的沖擊,而壓縮部分則傳遞給中間的減震臺,并和中間的減震臺重力相互抵消,從而保持避震器上半部分的穩定性。
4.2?SIMMECHANICS工具箱
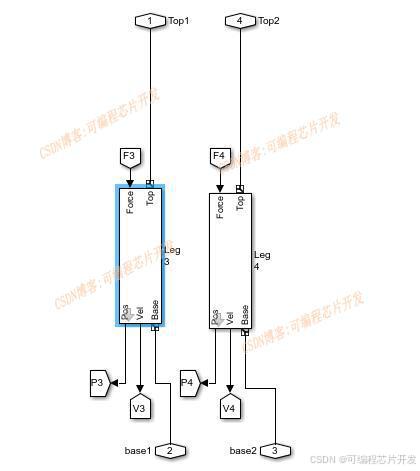
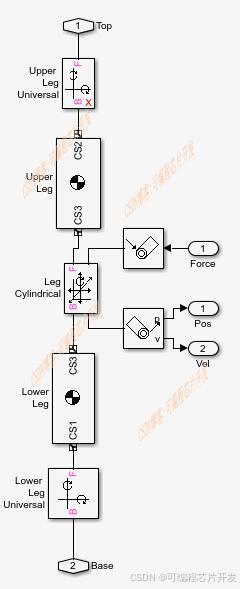
??????? SIMMECHANICS是MATLAB仿真中的一個工具箱,同時結合SIMULINK、MATLAB的功能。利用SIMMECHANICS模塊框圖對機構運動進行建模和動態仿真。SIMMECHANICS模塊組提供了建模的必要模塊,可以直接在SIMULINK中使用。SIMMECHANICS支持用戶自定義的構件模塊,可以設定質量和轉動慣量。
??????? SIMMECHANICS提供了大量對應實際系統的元件,如:剛體、鉸鏈、約束、坐標系統以及傳感器等。使用這些模塊可以方便的建立復雜機械系統的圖示化模型,進行機械系統的單獨分析或與任何SIMULINK設計的控制器及其它動態系統相連進行綜合仿真。
???????機構仿真是一組可以在SIMULINK環境下使用的特殊模塊庫。可以通過特殊的Sensor模塊和Actuator模塊與一般的SIMULINK模塊相連接,利用牛頓動力學中力和轉矩等基本概念,對各種運動副連接的剛體進行建模與仿真,實現對機構系統進行分析設計的目的。
5.完整工程文件
v











: てあります。)




)
:解鎖創業增長密碼與長漏斗分析)

