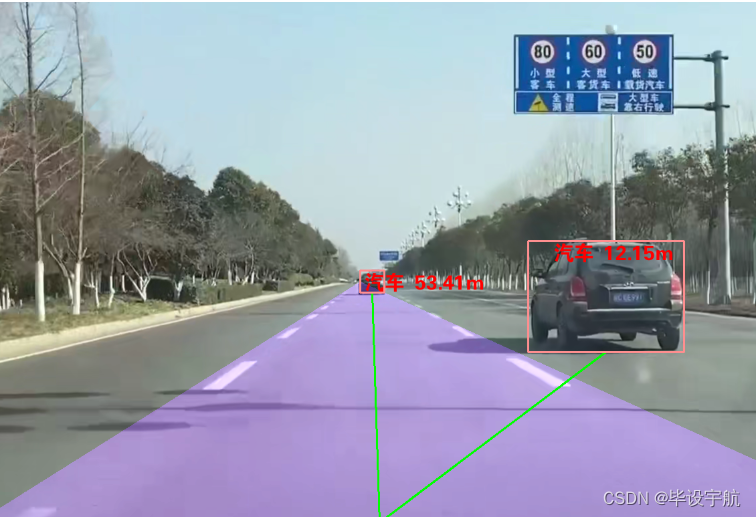
單目行車測距攝像系統是一種利用單個攝像頭實現車輛行駛中前方障礙物距離測量的技術。該系統通過計算機視覺算法,能夠實時分析攝像頭捕捉的圖像,精確計算出車輛與前方物體之間的距離,對于自動駕駛、高級駕駛輔助系統(ADAS)和智能交通系統至關重要。
技術原理:
- 圖像處理:系統首先對攝像頭捕獲的圖像進行預處理,包括色彩空間轉換、噪聲去除、邊緣檢測等,以提高后續算法的準確性和效率。
- 目標檢測:運用目標檢測算法(如YOLO、SSD或Faster R-CNN等),識別圖像中的車輛、行人或其他障礙物。
- 深度估計:通過單目測距技術,如基于特征匹配的立體視覺、結構光、或深度學習方法,估算目標物體的深度信息。這一步驟可能涉及到相機標定,以獲取相機的內外參數。
- 距離計算:結合目標檢測結果和深度信息,計算出每個目標與攝像機之間的距離。
- 實時反饋:系統將距離信息實時反饋給駕駛員或自動駕駛控制系統,以幫助做出安全決策,如緊急制動、避障等。
項目流程:
- 數據收集與標注:采集大量帶標注的真實世界圖像,用于訓練深度學習模型。
- 模型訓練:使用深度學習框架(如TensorFlow或PyTorch)訓練目標檢測和深度估計模型。
- 系統集成:將訓練好的模型集成到行車測距系統中,進行實時圖像處理和距離計算。
- 性能測試:在模擬和真實環境中測試系統的準確性和穩定性,包括不同的光照條件、天氣狀況和復雜的交通場景。
- 優化與迭代:根據測試結果,不斷優化算法和模型,提高測距精度和系統性能。
項目應用:
- 自動駕駛車輛:為自動駕駛車輛提供實時的環境感知能力,幫助車輛做出準確的駕駛決策。
- 高級駕駛輔助系統(ADAS):增強駕駛員的駕駛體驗,如前向碰撞預警、自動緊急制動等。
- 智能交通系統:為交通管理部門提供實時路況信息,優化交通流量,減少事故。
項目優勢:
- 成本效益:相較于雙目視覺或LiDAR,單目攝像頭成本更低,便于大規模部署。
- 實時性:系統能夠實時處理圖像,滿足高速行駛中快速反應的需求。
- 多功能性:除了測距,系統還能進行目標分類和跟蹤,提供全面的道路環境感知。
總之,單目行車測距攝像系統是現代智能交通和自動駕駛技術的重要組成部分,它利用先進的計算機視覺和深度學習技術,為安全駕駛和智能交通管理提供了強有力的支持。
主程序界面
#-*- coding: utf-8 -*-import tkinter as tk
from init_window import Tkwindow
from init_model import init_modelif __name__ == "__main__":window = tk.Tk()window.title('單目行車測距與多功能攝像頭 v0.9 ')window.geometry('1000x480')window.resizable(0, 0) # 防止用戶調整尺寸app_window = Tkwindow(window)app_window()window.mainloop()?




)








VP補題題解(48th))



 期末復習)

