在智能小車項目中都會有一個功能就是自動巡線,今天小飛魚通達來實驗的就是這個紅外尋跡傳感器。
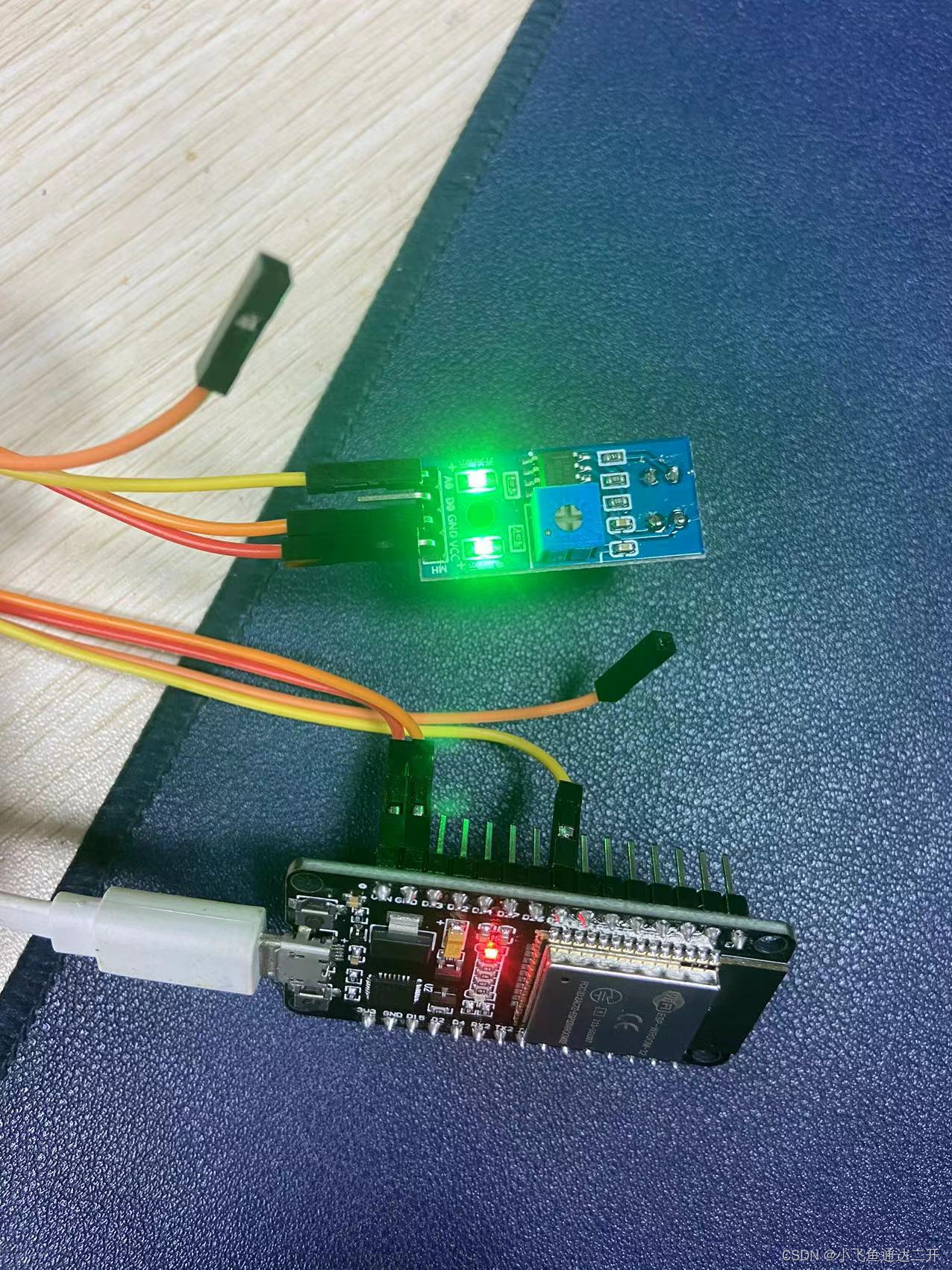
紅外尋跡傳感器的原理就是有一個小燈發出紅外光,光線照到物體后進行反射,有一個接收器進行接收,當在一定距離內會導通電路,
傳感器上有4個針腳,正負極2個針腳,另外連個一個是模擬針腳A0,一個是數字針腳D0,根據需要使用其中一個即可,當需要測試準確距離時使用模擬針腳A0。
#define pin 25void setup(){Serial.begin(9600); // 設置串口波特率為9600pinMode(pin, INPUT);
}float value = 0.0;
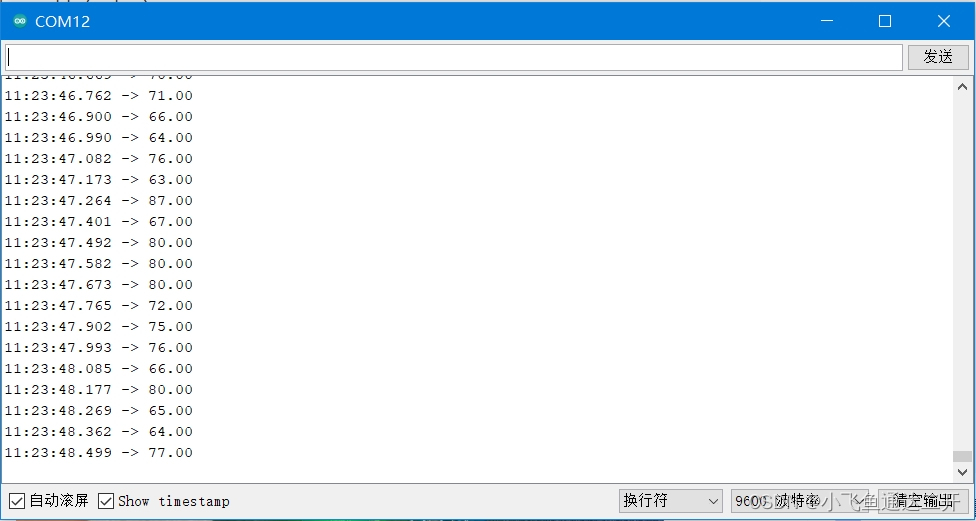
void loop(){ value = digitalRead(pin);//value = analogRead(pin);Serial.println(value);delay(200);
}
當傳感器距離較近且光線照射到白色材料上,返回值為0; 當照射到深顏色材料上返回有數值
 ?
?
擴展內容:
下面是一個紅外避障傳感器,也是智能小車項目中會用到的模塊,通過發射光線返回監測距離前方障礙物的距離,從而做出相應的躲避動作,這就是避障傳感器的應用原理。其使用方法和程序和?紅外尋跡傳感器完全類似,不再重復。


報名答題題庫(持續更新中,僅供學習分享使用))




)



之插入排序----直接插入排序和希爾排序)




;用法和常見問題)


)
)