😏★,°:.☆( ̄▽ ̄)/$:.°★ 😏
這篇文章主要介紹Carsim2019與Matlab2015b聯合仿真測試。
學其所用,用其所學。——梁啟超
歡迎來到我的博客,一起學習,共同進步。
喜歡的朋友可以關注一下,下次更新不迷路🥞
文章目錄
- :smirk:1. 預先準備
- :blush:2. 配置Carsim工程
- :satisfied:3. 完成Matlab模型
😏1. 預先準備
可參考以下鏈接,提前安裝好Carsim,并設置關聯好matlab/simulink環境。
http://t.csdnimg.cn/HKw5B # carsim安裝
http://t.csdnimg.cn/aaDpn # matlab關聯http://t.csdnimg.cn/uYPoY # 聯合仿真參考
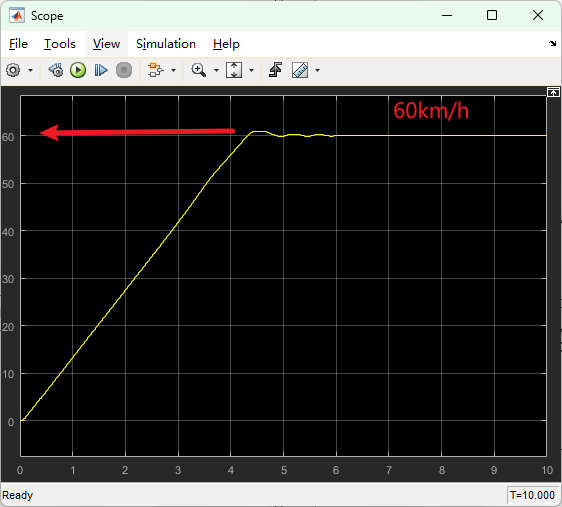
這一節目的是完成carsim和simulink的聯合仿真,來實現一個簡單的車輛控制,以恒定速度使車輛達到60km/h。
😊2. 配置Carsim工程
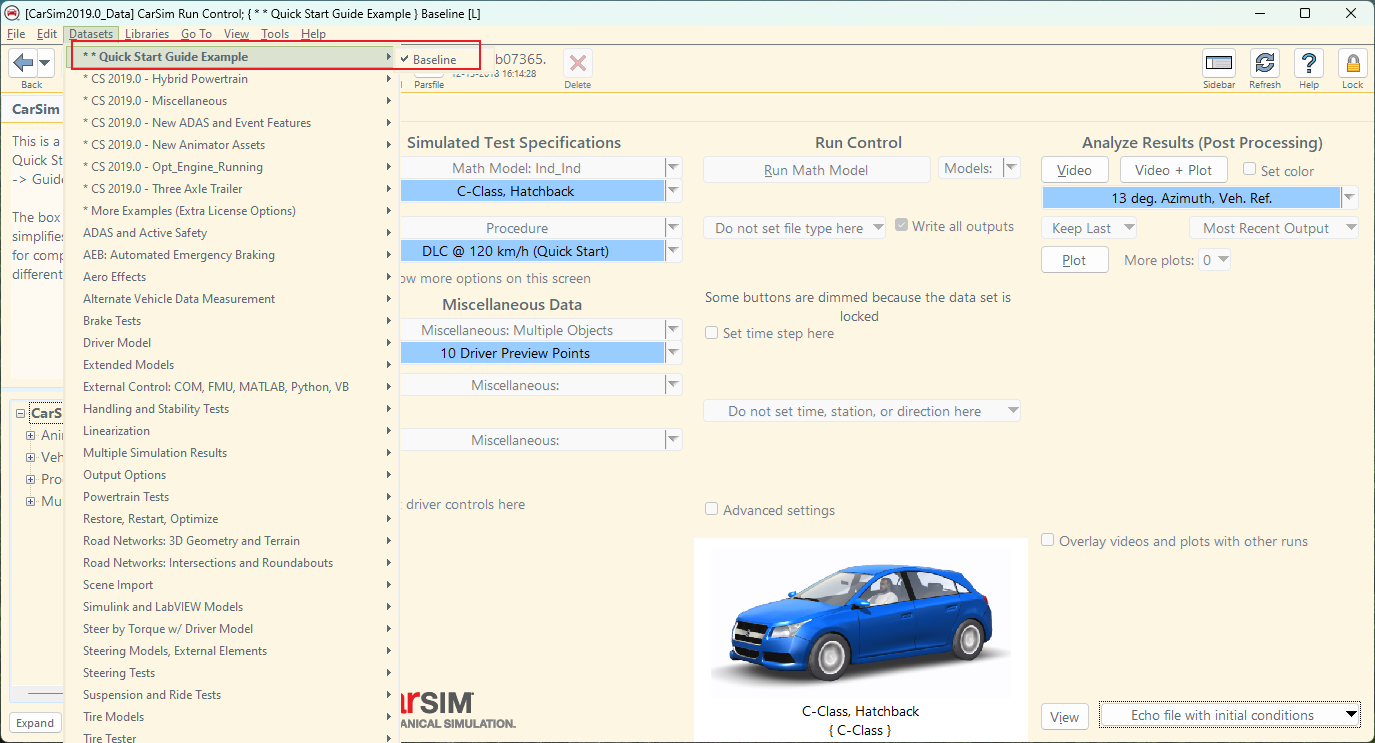
啟動Carsim與Matlab,Carsim來到快速啟動示例模型:
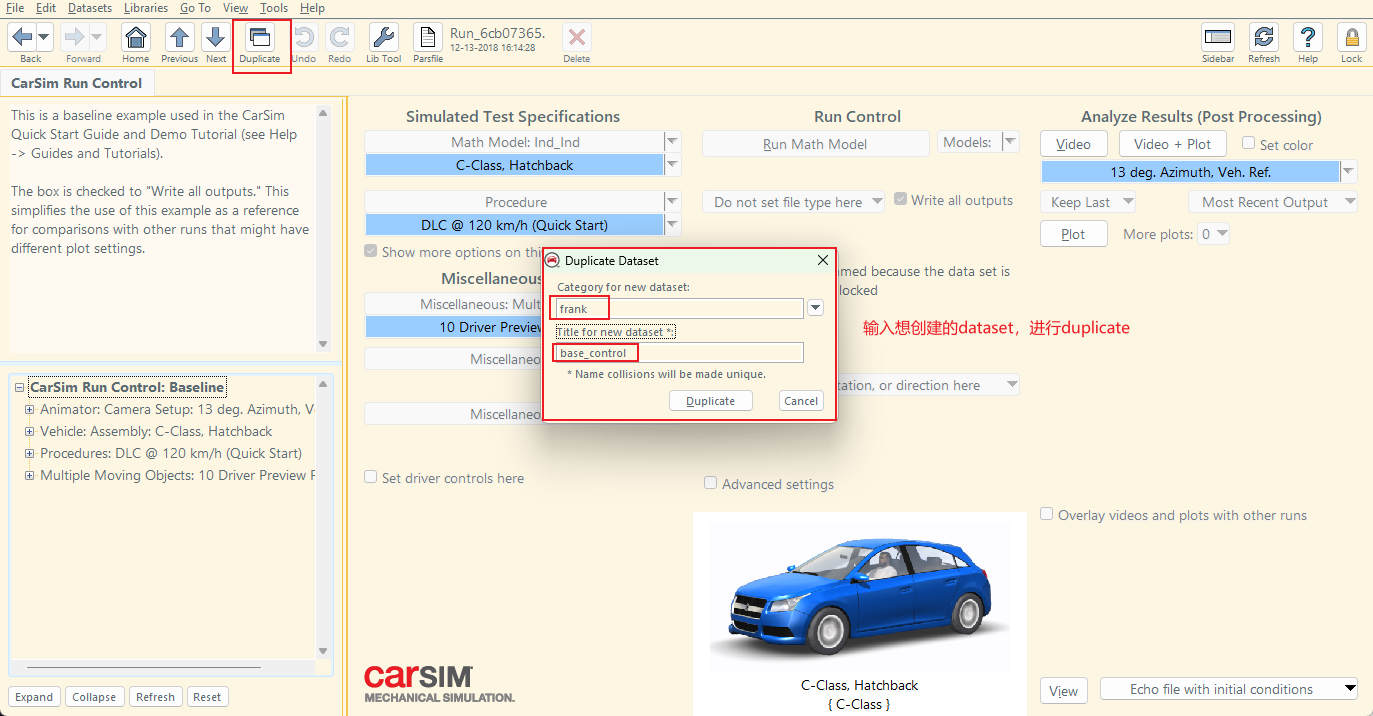
然后duplicate這個dataset(記住創建的名稱):
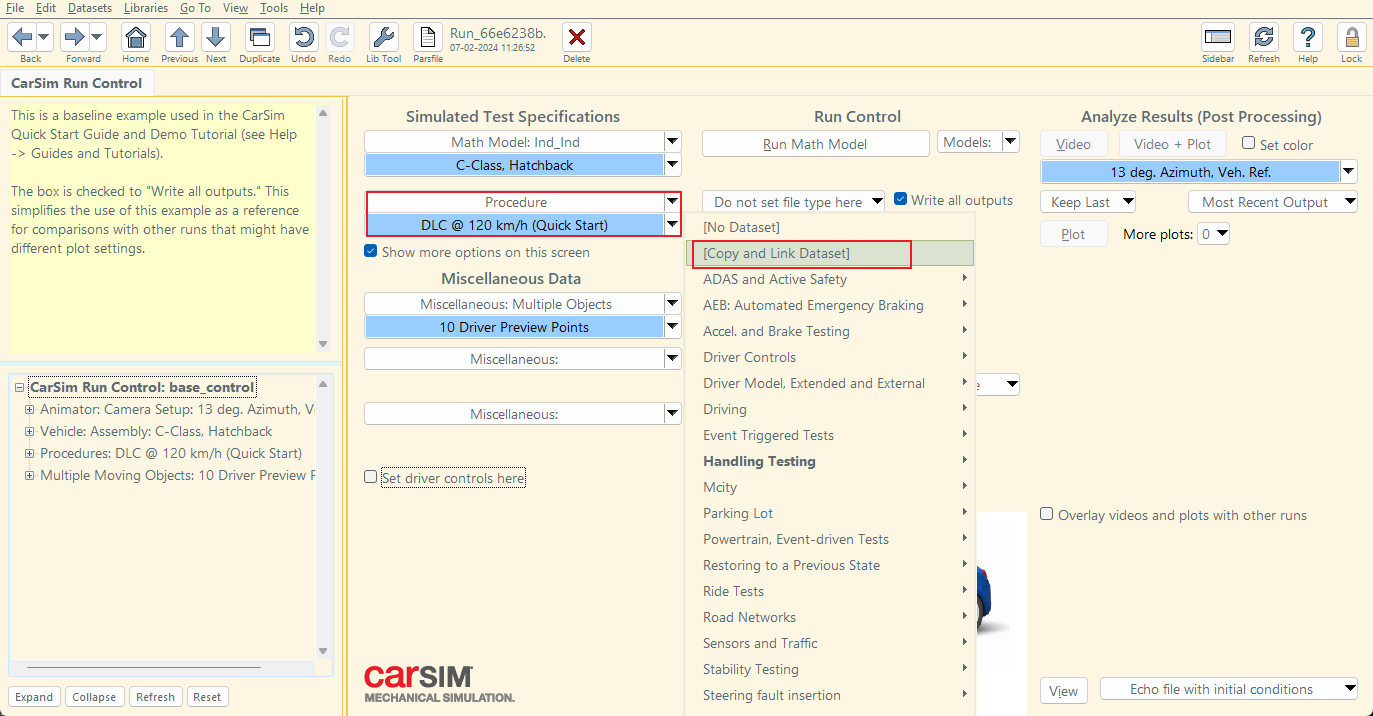
同樣復制一個procedure,輸入和上一步一樣的dataset名稱:
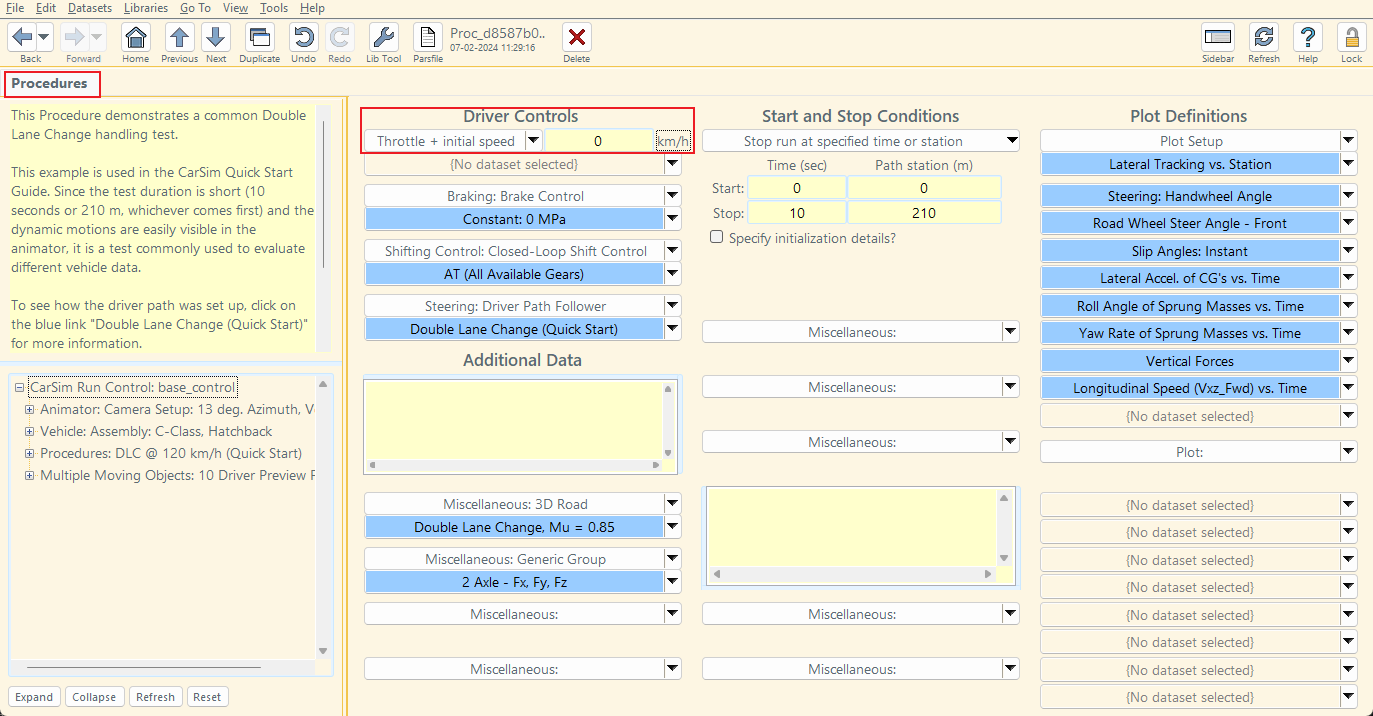
進入自定義的procedure,將恒定速度行駛改為初速為0:
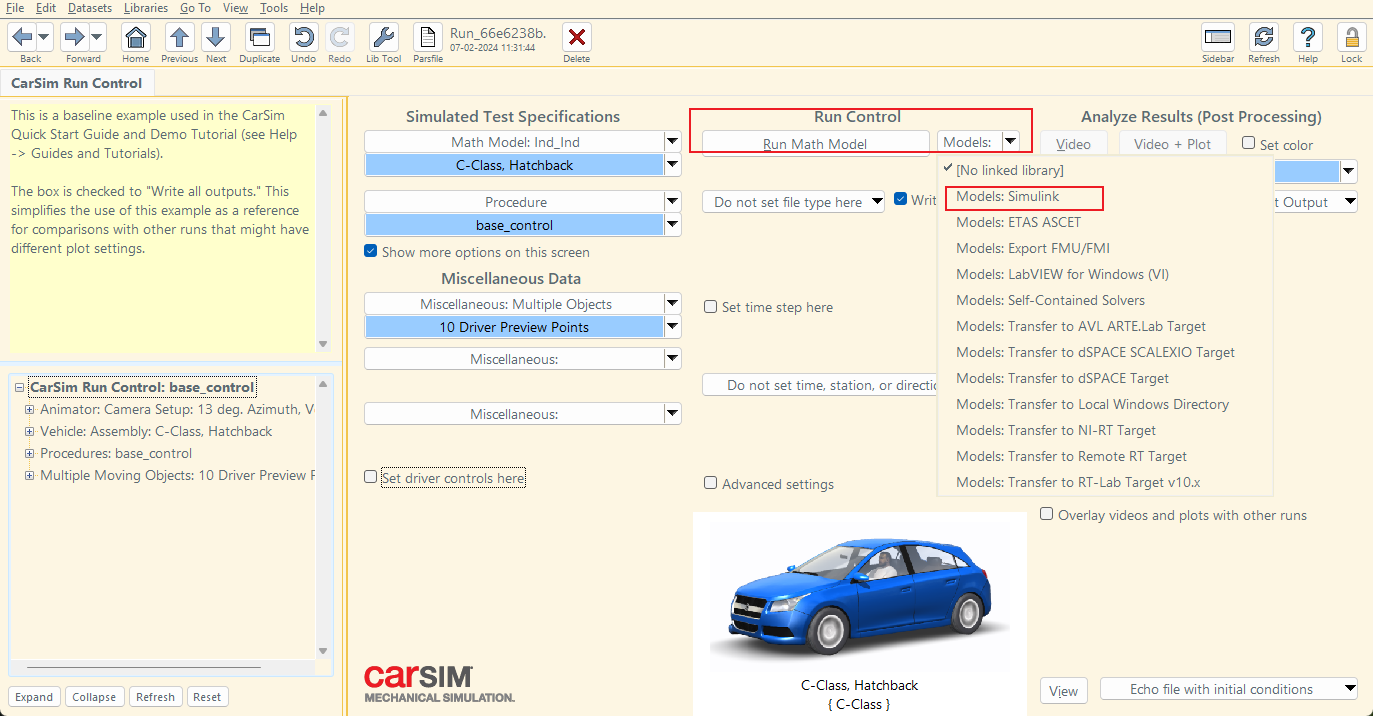
控制模型選擇鏈接Simulink:
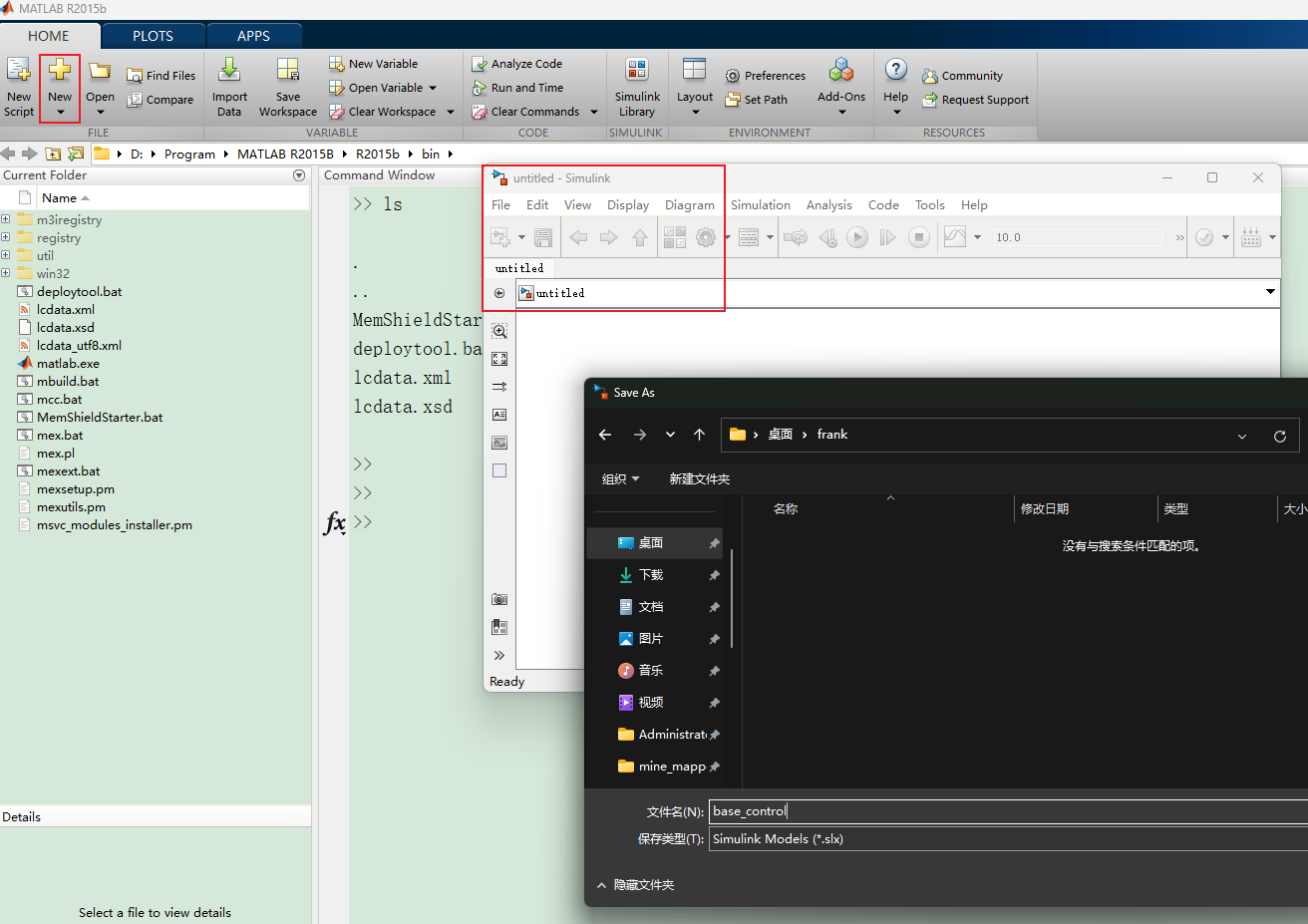
創建一個simulink模型:
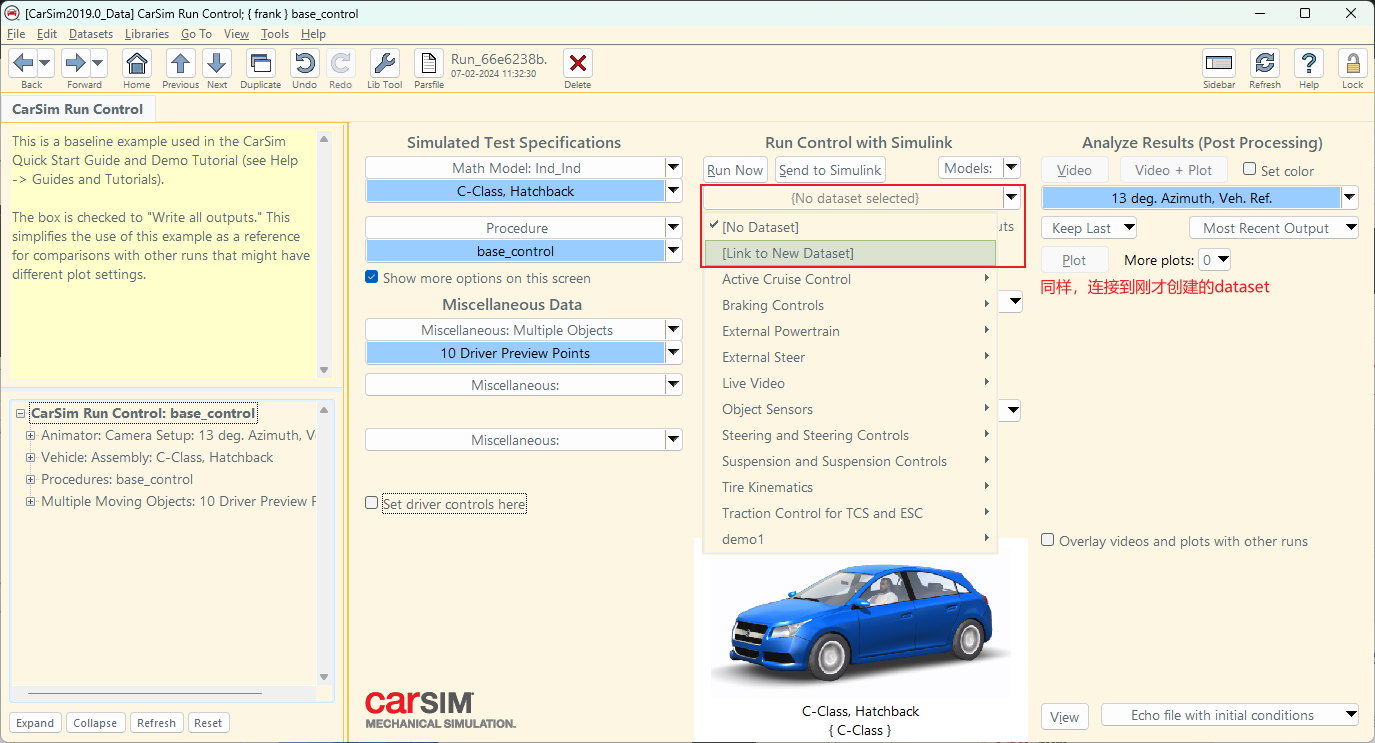
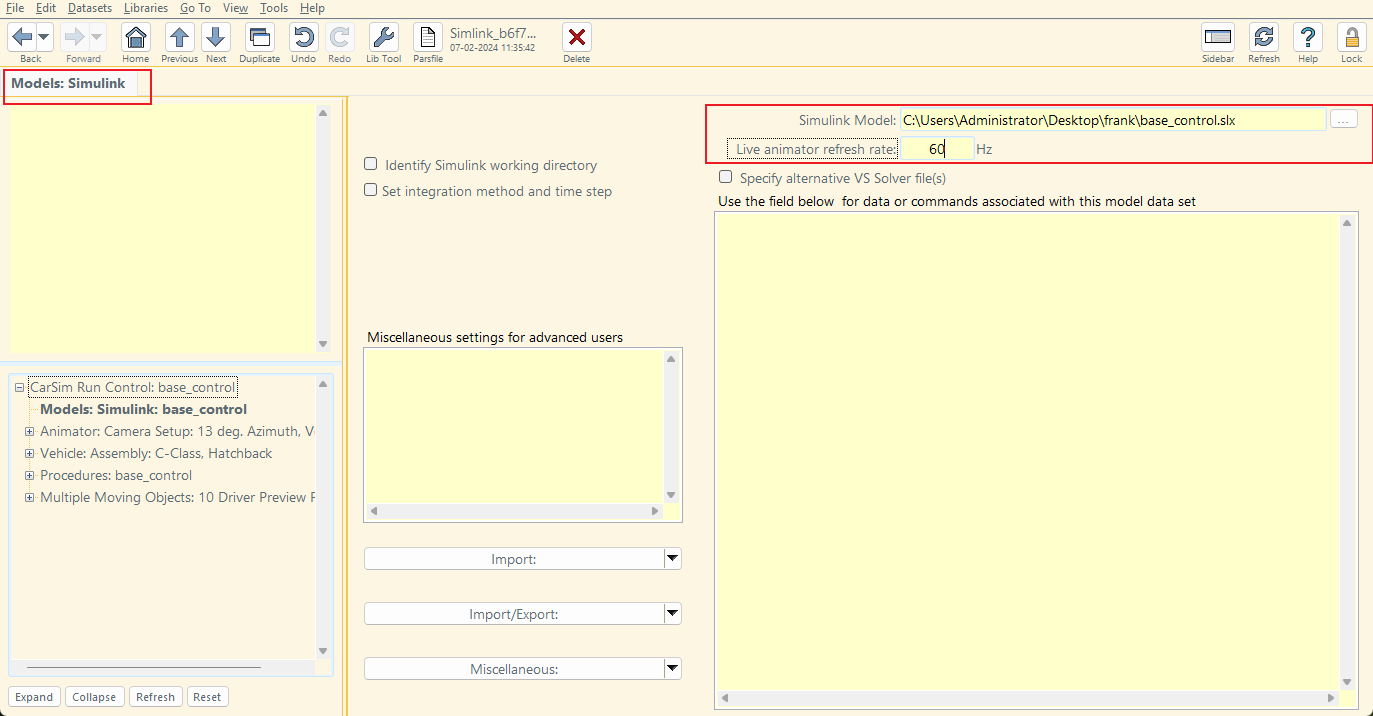
進入自定義的控制模型,鏈接剛才創建的slx并設置刷新頻率,然后設置輸入和輸出:
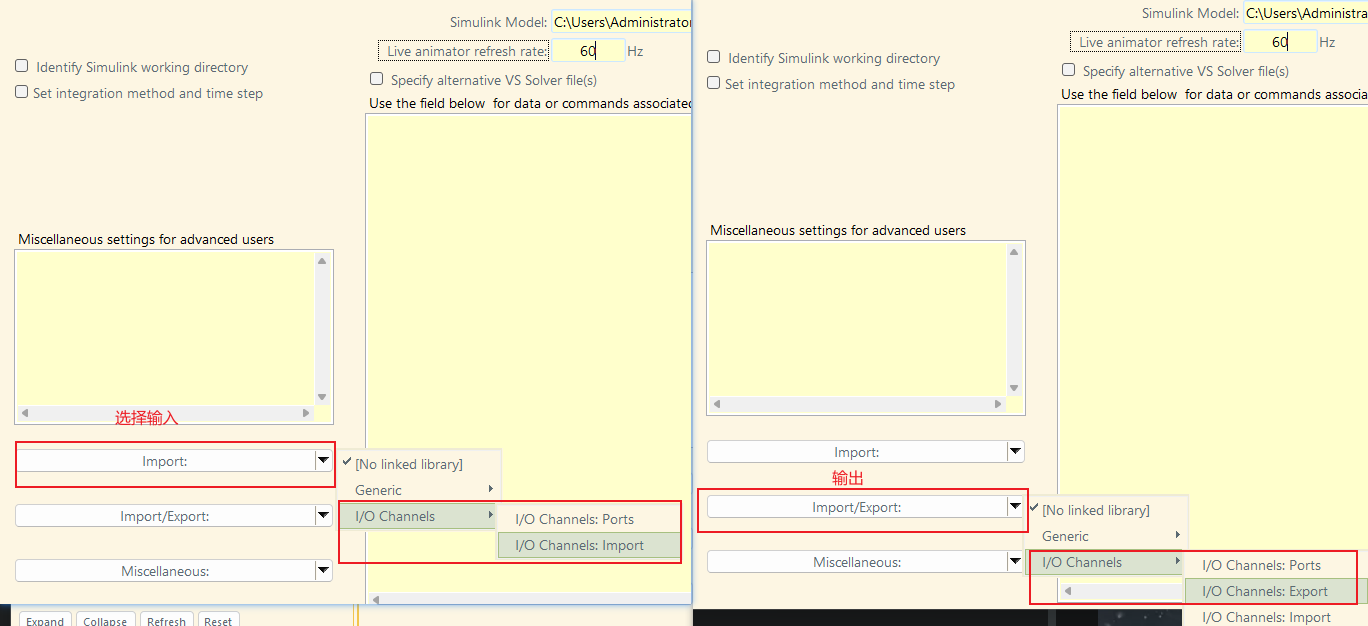
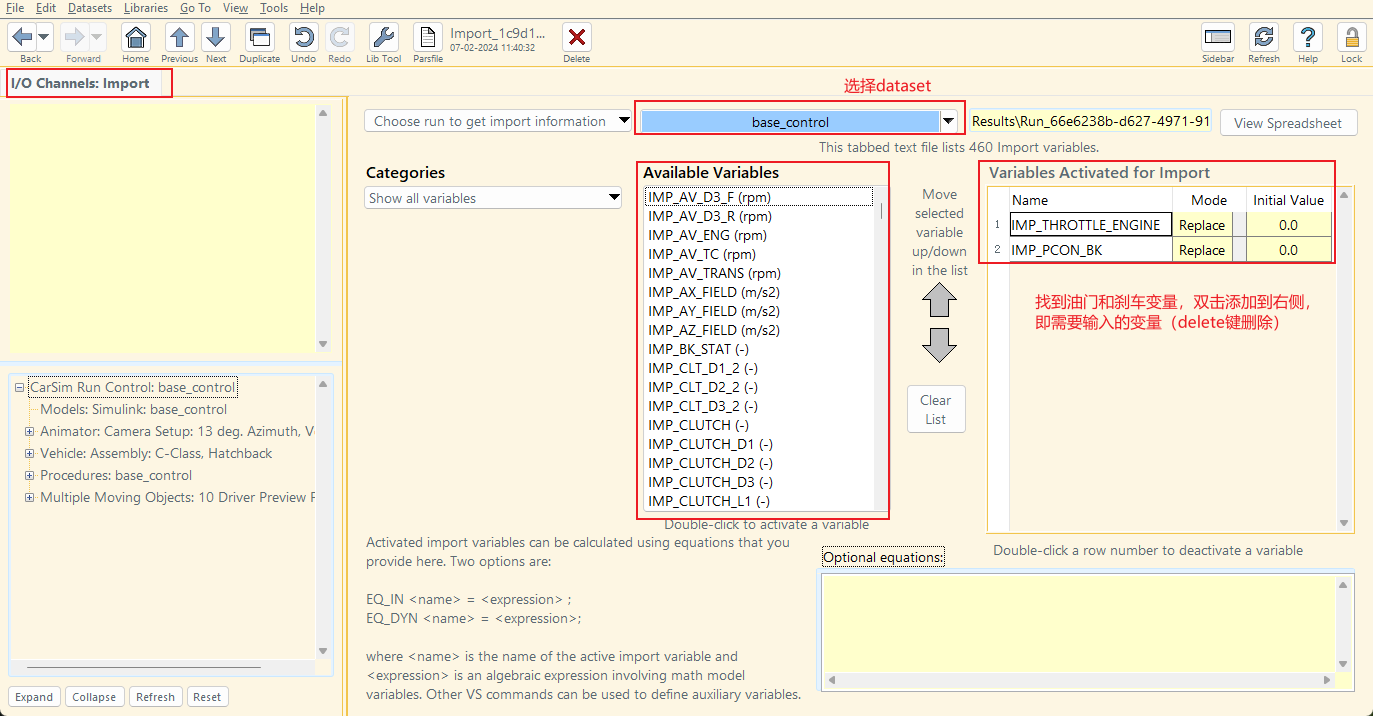
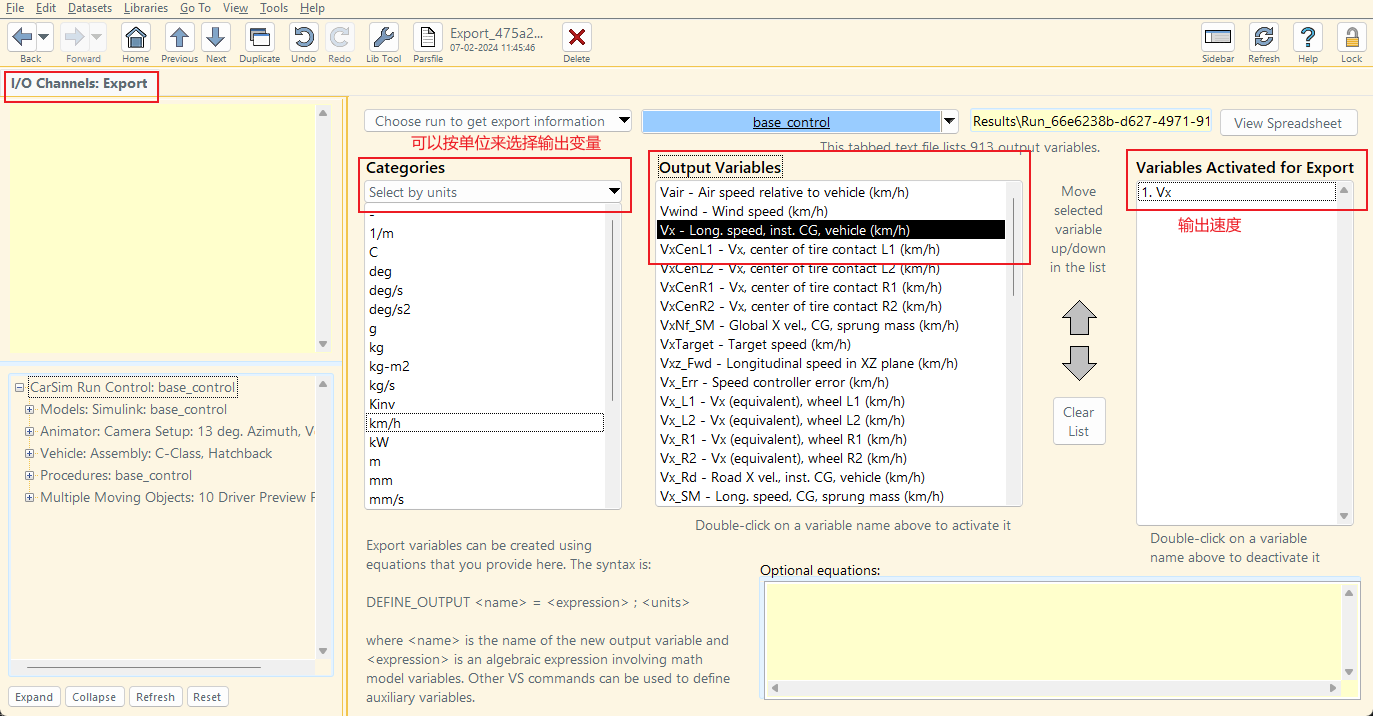
然后設置自定義輸入和輸出變量:
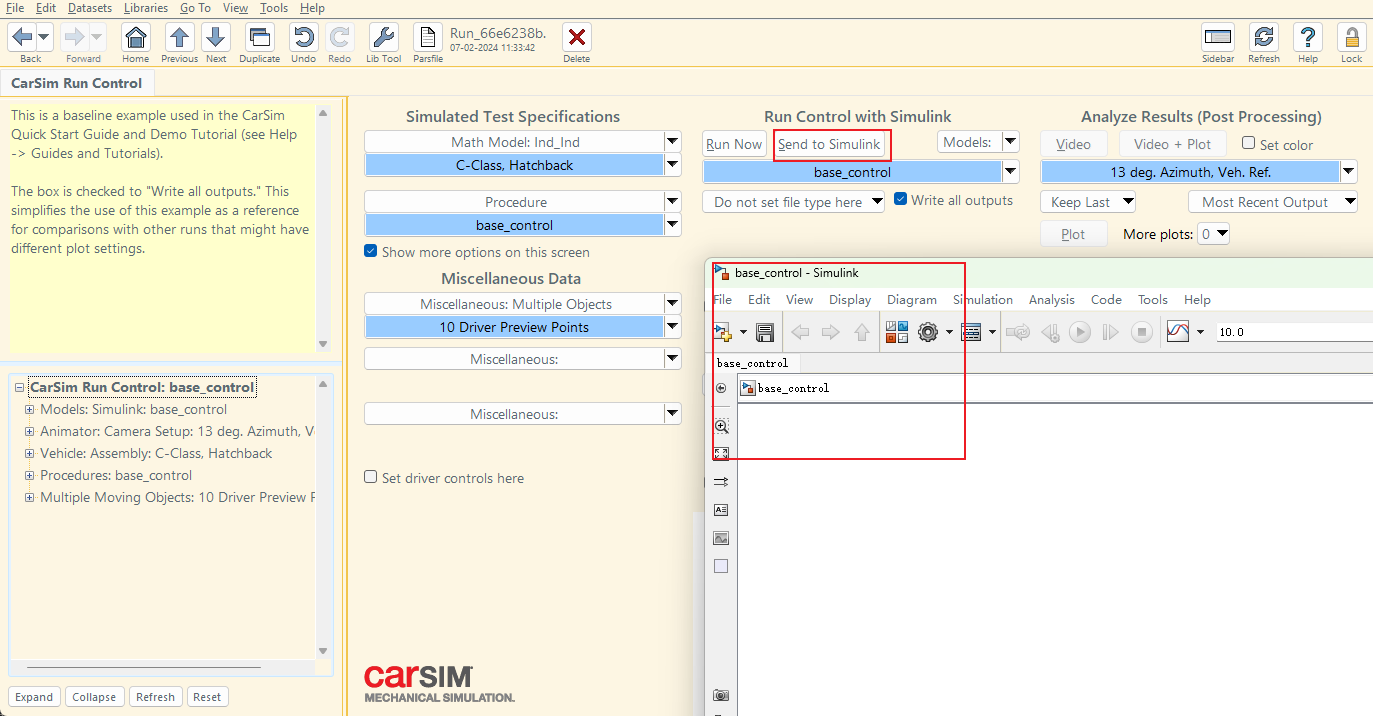
設置好輸入輸出后,點擊Home回到主頁,點擊Send to simulink,稍等會自動打開我們創建的模型:
😆3. 完成Matlab模型
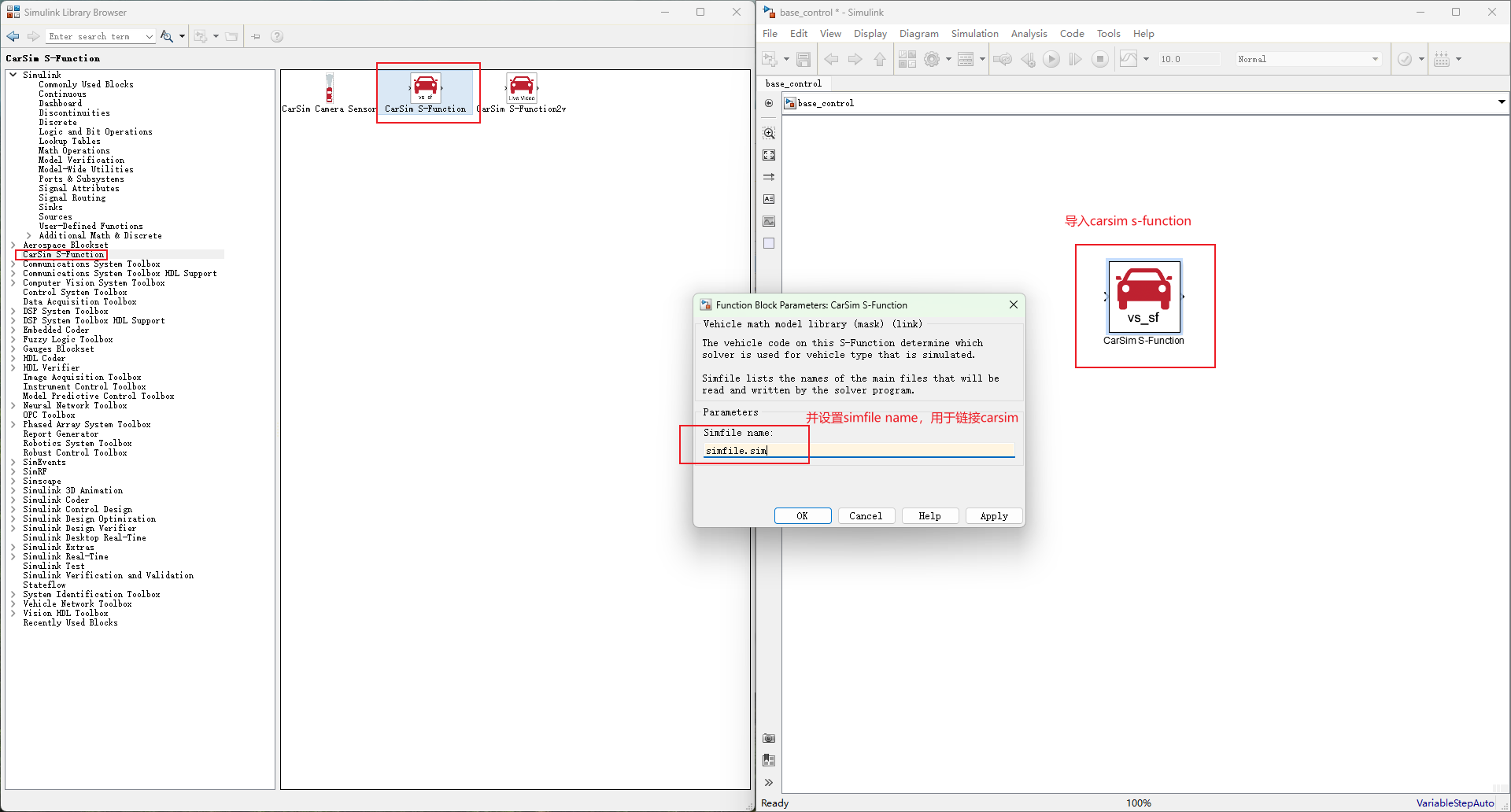
打開slx后,就開始創建我們的simulink模型,首先導入carsim s-function:
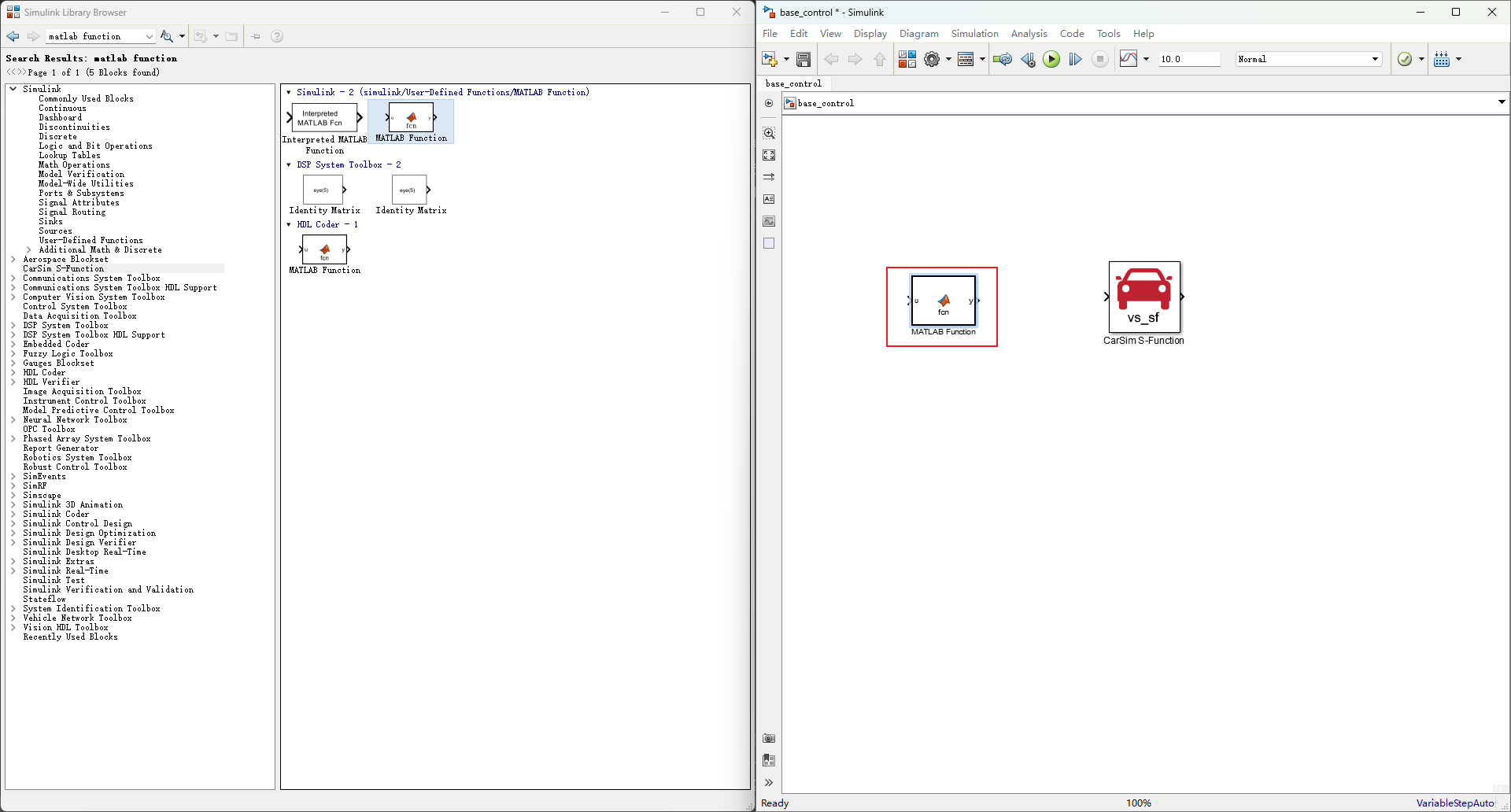
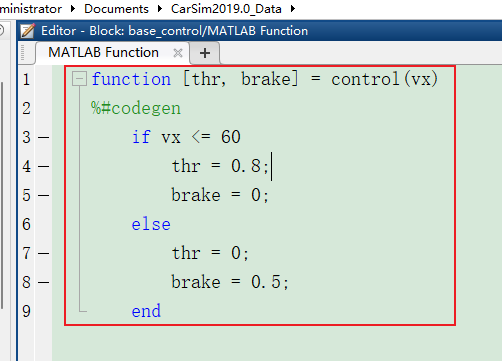
然后導入matlab function并于編寫邏輯:
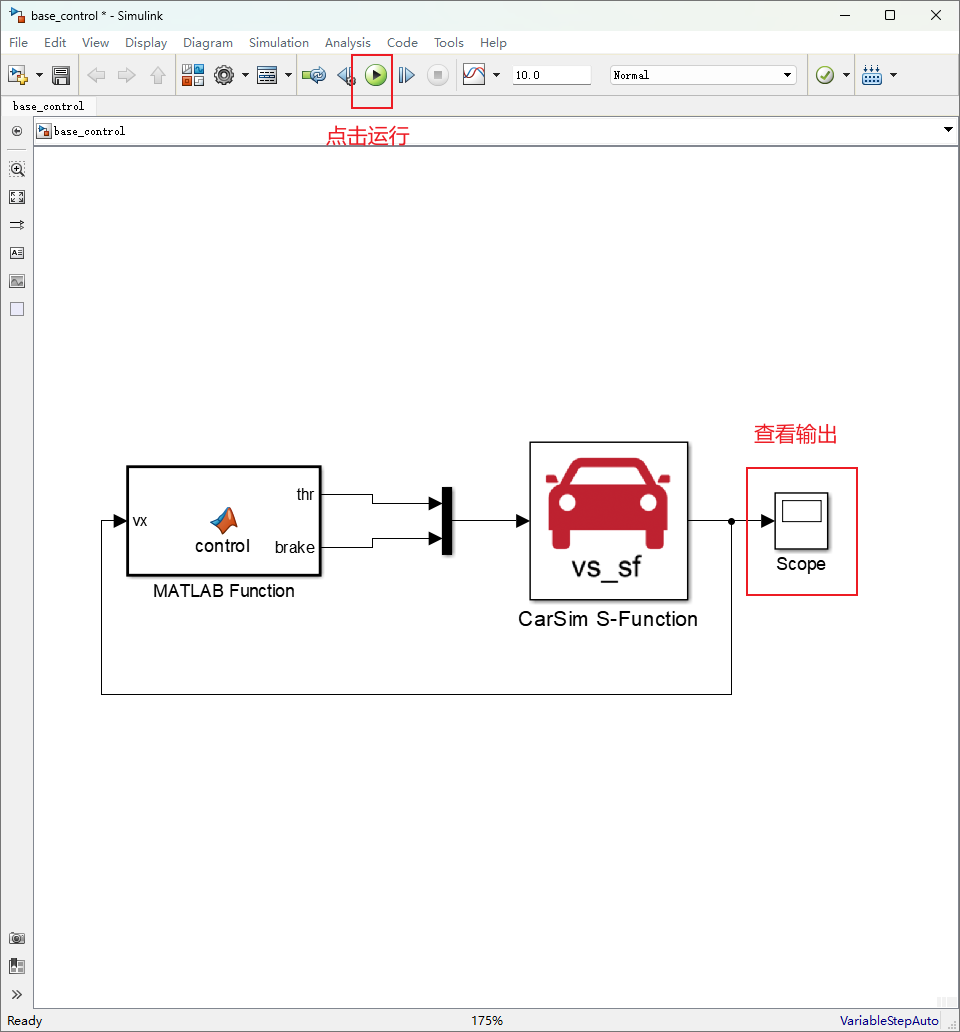
然后回到simulink,通過mux連接信號,用添加scope顯示輸出:
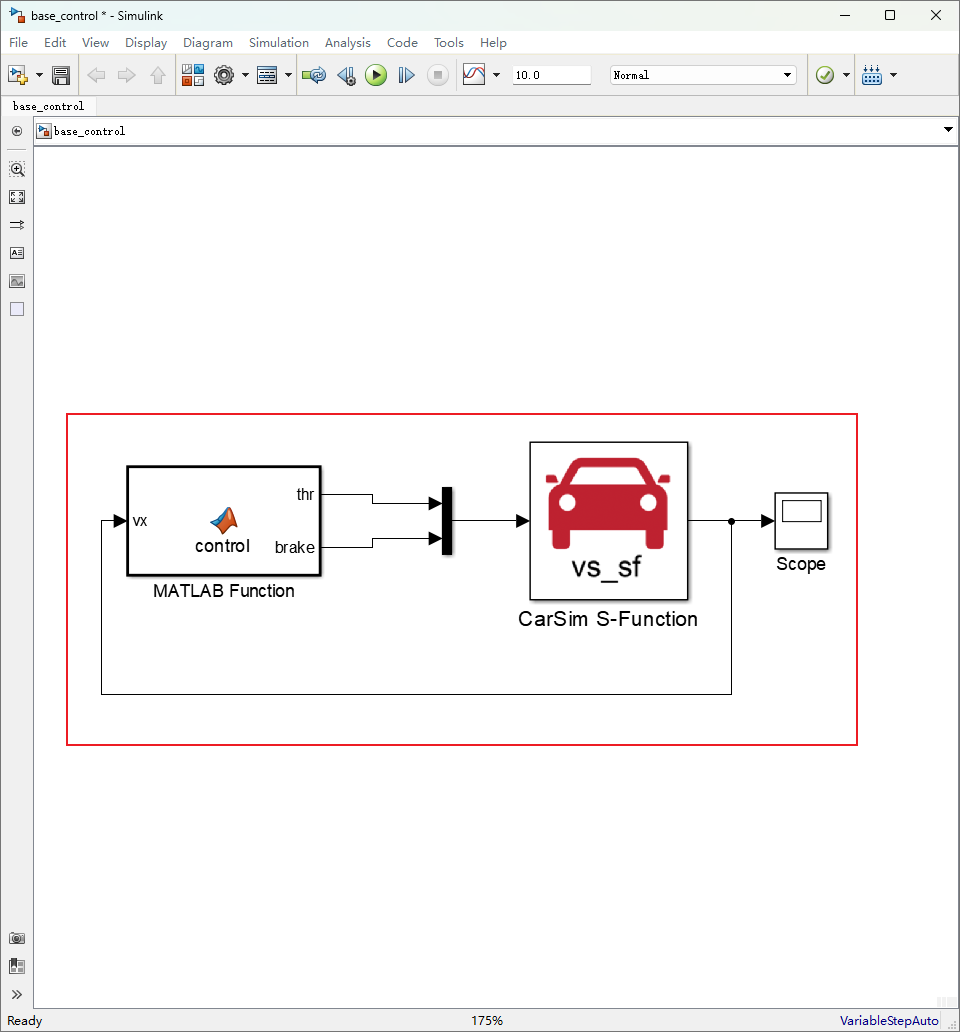
然后simulink運行查看輸出:
此外也可以在carsim主界面查看輸出:
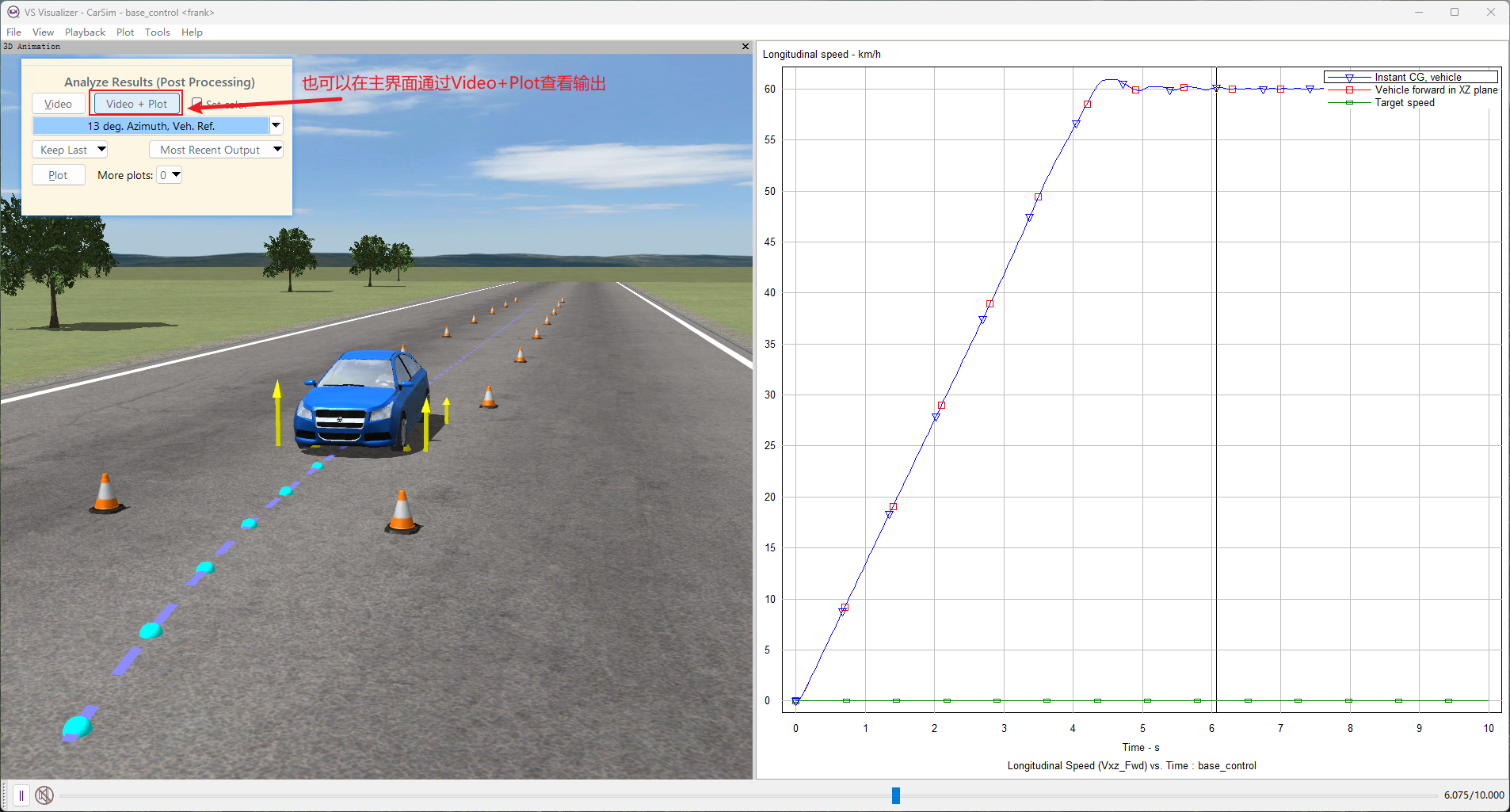

以上。

)
)







)


)

實踐)

)
)
