目錄
一、基本概念與術語
二、樹的ADT
三、二叉樹的定義和術語
四、平衡二叉樹
4.1 解釋
4.2 相關經典操作
4.3 代碼展示
一、基本概念與術語
樹(Tree)是由一個或多個結點組成的有限集合T。其中:
1 有一個特定的結點,稱為該樹的根(root)結點;
2 每個樹都有且僅有一個特定的,稱為根(Root)的節點。
樹的常用術語:
1 當n>1時,其中每一個集合本身又是一棵樹,并且稱為根的子樹(SubTree);
2 節點的子樹稱為該節點的子節點(Child),相應的,該節點稱為子節點的父節點(Parent );
3 同一個父節點的子節點之間稱為兄弟節點(Sibling);
4 節點的層次(Level)從根節點開始定義,根為第一層,根的子節點為第二層,雙親在同一層的節點互為堂兄弟,樹中節點最大的層次稱為樹的深度或高度;
5 如果將樹中節點的各子樹看成從左到右是有次序的,不能互換的,則稱該樹為有序R樹,否則稱為無序樹;
6 如果有n顆互不相交的樹組成一個集合,則這個集合被稱之為森林。
二、樹的ADT
數據及關系:
?? ?具有相同數據類型的數據元素或結點的有限集合。樹T的二元組形式為:????????????????????????? ?
?? ??? ??? ?T=(D,R)
?? ?其中D為樹T中結點的集合,R為樹中結點之間關系的集合。
?????????????????????????? D={Root}∪DF
?? ?其中,Root為樹T的根結點,DF為樹T的根Root的子樹集合。
???????????? ??? ??? ?R={<Root,ri>,i=1,2,…,m}
?? ?其中,ri是樹T的根結點Root的子樹Ti的根結點。
操作:
?? ?Constructor:
?? ??? ?前提:已知根結點的數據元素之值。
?? ??? ?結果:創建一棵樹。
?? ?Getroot:
?? ??? ?前提:已知一棵樹。.
?? ??? ?結果:得到樹的根結點。
?? ?FirstChild:
?? ??? ?前提:已知樹中的某一指定結點 p。
?? ??? ?結果:得到結點 p 的第一個兒子結點。
?? ?NextChild:
?? ??? ?前提:已知樹中的某一指定結點 p 和它的一個兒子結點 u。
?? ??? ?結果:得到結點 p 的兒子結點 u 的下一個兄弟結點 v。
基本操作:
????????初始化一棵空樹;
????????創建一棵樹;
????????判斷空樹,為空返回True,否則返回False;
????????按照某特定順序遍歷一棵樹;
????????求樹的深度;
????????在樹中某特定位置插入結點;
????????在樹中某特定位置刪除結點;
????????求某結點的雙親結點;
????????銷毀樹;
????????等等;
三、二叉樹的定義和術語
????????二叉樹(Tree)是n個節點的有限集合,該集合為空集(或稱為空二叉樹),或者由一個根節點和兩顆互不相交的、分別稱為根節點的左子樹與右子樹的二叉樹組成。
A. 所有節點都只有左子樹的二叉樹叫左斜樹,所有節點都只有右子樹的二叉樹叫右斜樹,這兩者統稱為斜樹;
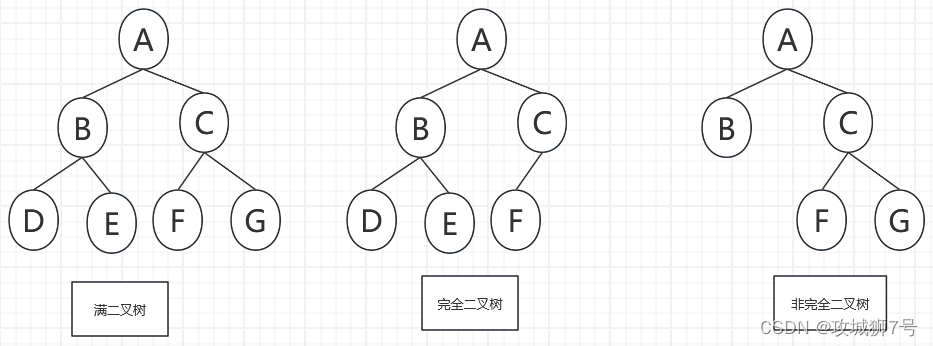
B. 在一棵二叉樹中,如果所有分支節點都存在左子樹與右子樹,并且所有葉子都在同一層次上,這樣的二叉樹稱為滿二叉樹;
C. 對一顆具有n個結點的二叉樹按層序編號,如果編號i(1<i<n)的節點與同樣深度的滿二叉樹中編號為i的結點在二叉樹中位置完全相同,則這顆二叉樹稱為完全叉樹。
四、平衡二叉樹
4.1 解釋
????????平衡二叉樹(Balanced Binary Tree),又稱為AVL樹(有別于AVL算法),是一種特殊的二叉搜索樹(Binary Search Tree)結構12。它具有以下性質:
- 它可以是空樹2。
- 它的左子樹和右子樹的高度差的絕對值不超過12。
- 它的左子樹和右子樹都是平衡二叉樹12。
????????平衡二叉樹的設計目的是為了解決普通二叉搜索樹在插入、刪除等操作時可能產生的不平衡問題,從而避免樹的高度過高,確保搜索效率始終保持在相對優化的水平。在平衡二叉樹中,查找、插入和刪除操作的時間復雜度都可以維持在O(logN)2。
平衡二叉樹在計算機科學中有廣泛的應用,例如:
- 數據庫索引:用于加速數據庫的查詢操作3。
- 查找和排序:可以快速查找和排序數據3。
- 模擬實際問題:如航班預定系統中的座位分配3。
- 實現字典或符號表:鍵是樹中的節點,值是與該鍵相關聯的數據,支持高效的查找、插入和刪除操作3。
- 實現線性數據結構:如棧、隊列和優先隊列3。
- 網絡路由:用于實現網絡路由表,進行快速的路由查找3。
- 文件系統:用于實現文件系統的索引結構,支持快速的文件查找和訪問3。
????????總之,平衡二叉樹是一種高效的數據結構,它通過保持樹的平衡來優化搜索性能,并在各種應用中發揮著重要作用。
4.2 相關經典操作
????????平衡二叉樹(AVL樹)在插入或刪除節點后,可能會破壞其平衡性(即左右子樹的高度差超過1)。為了重新恢復平衡,需要進行旋轉操作。旋轉操作包括四種:左單旋、右單旋、左右旋和右左旋。下面我會逐一解釋這四種操作:
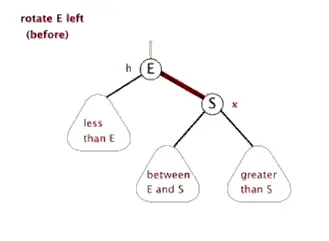
1. 左單旋:
????????當某個節點的左子樹的左子樹插入了一個新節點,導致該節點失去平衡時,需要進行左單旋。
步驟:
- 以失去平衡的節點為根的子樹中,找到該節點左子樹的根節點(記作A)。
- 將A節點提升為新的根節點。
- 將原根節點變為A的右子樹。
- A的左子樹保持不變。
左單旋的結果是將不平衡向右側轉移。
左單旋舉例:

????????針對節點8,它的左子樹的高度是1,右子樹的高度是3,高度差超過1.并且出錯的節點13和15均位于節點8的右子節點12的右邊,則通過左旋便可修復。
其一左單旋的結果:

動圖展示:
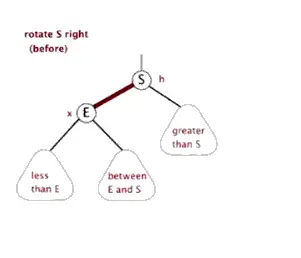
2. 右單旋:
????????與左單旋對稱,當某個節點的右子樹的右子樹插入了一個新節點,導致該節點失去平衡時,需要進行右單旋。
步驟:
- 以失去平衡的節點為根的子樹中,找到該節點右子樹的根節點(記作A)。
- 將A節點提升為新的根節點。
- 將原根節點變為A的左子樹。
- A的右子樹保持不變。
右單旋的結果是將不平衡向左側轉移。
右單旋舉例:

????????針對節點8,它的左子樹的高度為3,右子樹高度為1,高度差超過1。并且出錯的節點1和3位于8節點的左子節點4的左邊。針對這種類型的非平衡樹,通過右旋便可以使其重新平衡。
具體做法: 將節點8作為節點4的右子節點,節點6作為節點8的左子節點
其一右單旋的結果:

用一個動圖來表示 右旋
3. 左右旋:
????????當某個節點的左子樹的右子樹插入了一個新節點,導致該節點失去平衡時,需要進行左右旋。
步驟:
- 先對失去平衡的節點的左子樹進行右單旋。
- 再對整棵樹進行左單旋。
????????左右旋實際上是右單旋和左單旋的組合,它首先嘗試將不平衡向右側轉移,然后再將不平衡向左側轉移。
左右旋舉例:

????????針對節點8,左子樹的高度是3,右子樹高度是1,高度差超過1。并且出錯的節點5和7均位于節點8的左節點4的右邊。這種情況需要先左旋再右旋便可恢復。
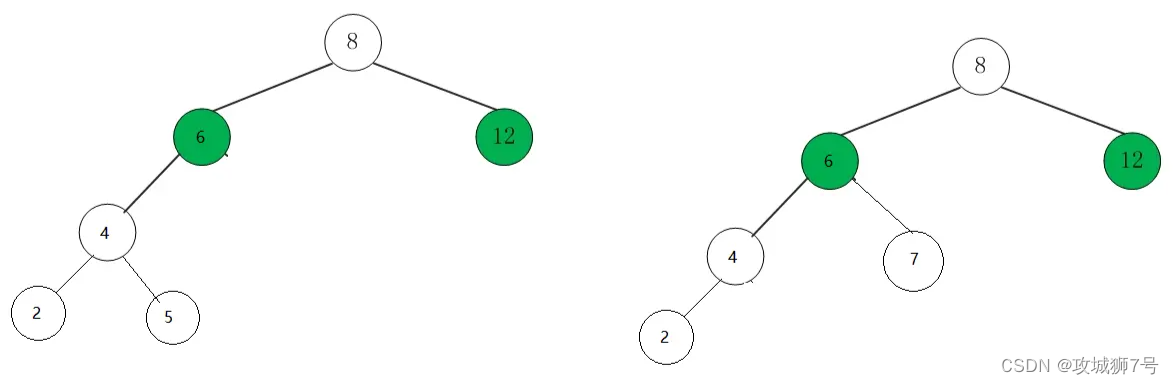
????????針對節點4進行左旋,左旋后變成了需要右旋的情況,可參考上面的右旋進行旋轉即可。
4. 右左旋:
????????與左右旋對稱,當某個節點的右子樹的左子樹插入了一個新節點,導致該節點失去平衡時,需要進行右左旋。
步驟:
- 先對失去平衡的節點的右子樹進行左單旋。
- 再對整棵樹進行右單旋。
????????右左旋實際上是左單旋和右單旋的組合,它首先嘗試將不平衡向左側轉移,然后再將不平衡向右側轉移。
????????這些旋轉操作確保了AVL樹在插入或刪除節點后仍然保持平衡,從而保證了樹的搜索效率。在進行旋轉操作時,還需要更新相關節點的高度信息,以便在后續操作中繼續檢查平衡性。
右左旋舉例:

類似的針對12節點先進行右旋,再整體左旋,原理類似 不再贅述
4.3 代碼展示
????????平衡二叉樹的左單旋,右單旋,左右旋,右左旋操作代碼演示
#include "Tree.h"CTree::CTree() :m_pRoot(0), m_nCount(0)
{
}CTree::~CTree()
{
}//************************************
// Method: AddData 添加數據
// FullName: CTree::AddData
// Access: private
// Returns: bool
// Parameter: int nData
//************************************
bool CTree::AddData(int nData)
{return AddData(m_pRoot, nData);
}//************************************
// Method: AddData
// FullName: CTree::AddData
// Access: private
// Returns: bool
// Parameter: PTREE_NODE & pTree 根節點
// Parameter: int nData
//************************************
bool CTree::AddData(TREE_NODE*& pTree, int nData)
{//pTree是否為空,如果為空說明有空位可以添加if (!pTree){pTree = new TREE_NODE{};pTree->nElement = nData;m_nCount++;return true;}//與根做對比,小的放在其左子樹,否則放在右子樹if (nData > pTree->nElement){AddData(pTree->pRChild, nData);//判斷是否平衡if (GetDeep(pTree->pRChild) - GetDeep(pTree->pLChild) == 2){//判斷如何旋轉if (pTree->pRChild->pRChild){//左旋LeftWhirl(pTree);}else if (pTree->pRChild->pLChild){//右左旋RightLeftWhirl(pTree);}}}if (nData < pTree->nElement){AddData(pTree->pLChild, nData);//判斷是否平衡if (GetDeep(pTree->pLChild) -GetDeep(pTree->pRChild) == 2){//判斷如何旋轉if (pTree->pLChild->pLChild){//右旋RightWhirl(pTree);}else if (pTree->pLChild->pLChild){//左右旋LeftRightWhirl(pTree);}}}
}//************************************
// Method: DelData 刪除元素
// FullName: CTree::DelData
// Access: private
// Returns: bool
// Parameter: int nData
//************************************
bool CTree::DelData(int nData)
{return DelData(m_pRoot, nData);
}//************************************
// Method: DelData
// FullName: CTree::DelData
// Access: private
// Returns: bool
// Parameter: PTREE_NODE & pTree 根節點
// Parameter: int nData
//************************************
bool CTree::DelData(PTREE_NODE& pTree, int nData)
{bool bRet = false;//判斷是否為空樹if (empty()){return false;}//開始遍歷要刪除的數據if (pTree->nElement == nData){//判斷是否為葉子節點,是就可以直接刪除,//不是則需要找代替if (!pTree->pLChild && !pTree->pRChild){delete pTree;pTree = nullptr;m_nCount--;return true;}//根據左右子樹的深度查找要替換的節點if (GetDeep(pTree->pLChild) >= GetDeep(pTree->pRChild)){PTREE_NODE pMax = GetMaxOfLeft(pTree->pLChild);pTree->nElement = pMax->nElement;DelData(pTree->pLChild, pMax->nElement);}else{PTREE_NODE pMin = GetMinOfRight(pTree->pRChild);pTree->nElement = pMin->nElement;DelData(pTree->pRChild, pMin->nElement);}}else if (nData > pTree->nElement){bRet = DelData(pTree->pRChild, nData);//判斷是否平衡if (GetDeep(pTree->pLChild) -GetDeep(pTree->pRChild) == 2){//判斷如何旋轉if (pTree->pLChild->pLChild){//右旋RightWhirl(pTree);}else if (pTree->pLChild->pLChild){//左右旋LeftRightWhirl(pTree);}}}else /*if (nData < pTree->nElement)*/{bRet = DelData(pTree->pLChild, nData);//判斷是否平衡if (GetDeep(pTree->pRChild) -GetDeep(pTree->pLChild) == 2){//判斷如何旋轉if (pTree->pRChild->pRChild){//左旋LeftWhirl(pTree);}else if (pTree->pRChild->pLChild){//右左旋RightLeftWhirl(pTree);}}}return bRet;
}//************************************
// Method: ClearTree 清空元素
// FullName: CTree::ClearTree
// Access: private
// Returns: void
//************************************
void CTree::ClearTree()
{ClearTree(m_pRoot);m_nCount = 0;
}//************************************
// Method: ClearTree
// FullName: CTree::ClearTree
// Access: private
// Returns: void
// Parameter: PTREE_NODE & pTree 根節點
//************************************
void CTree::ClearTree(PTREE_NODE& pTree)
{//從葉子節點開始刪除//刪除其左右子樹后再刪除根節點本身//判斷是否為空樹if (empty()){return;}//判斷是否為葉子節點if (!pTree->pLChild && !pTree->pRChild){delete pTree;pTree = nullptr;return;}ClearTree(pTree->pLChild);ClearTree(pTree->pRChild);ClearTree(pTree);
}//************************************
// Method: TravsoualPre 前序遍歷
// FullName: CTree::TravsoualPre
// Access: private
// Returns: void
//************************************
void CTree::TravsoualPre()
{TravsoualPre(m_pRoot);
}//************************************
// Method: TravsoualPre
// FullName: CTree::TravsoualPre
// Access: private
// Returns: void
// Parameter: PTREE_NODE pTree 根節點
//************************************
void CTree::TravsoualPre(PTREE_NODE pTree)
{//遞歸的返回條件if (!pTree){return;}//根左右printf("%d ", pTree->nElement);TravsoualPre(pTree->pLChild);TravsoualPre(pTree->pRChild);
}//************************************
// Method: TravsoualMid 中序遍歷
// FullName: CTree::TravsoualMid
// Access: private
// Returns: void
//************************************
void CTree::TravsoualMid()
{TravsoualMid(m_pRoot);
}//************************************
// Method: TravsoualMid
// FullName: CTree::TravsoualMid
// Access: private
// Returns: void
// Parameter: PTREE_NODE pTree 根節點
//************************************
void CTree::TravsoualMid(PTREE_NODE pTree)
{//遞歸的返回條件if (!pTree){return;}//左根右TravsoualMid(pTree->pLChild);printf("%d ", pTree->nElement);TravsoualMid(pTree->pRChild);
}//************************************
// Method: TravsoualBack 后序遍歷
// FullName: CTree::TravsoualBack
// Access: private
// Returns: void
//************************************
void CTree::TravsoualBack()
{TravsoualBack(m_pRoot);
}//************************************
// Method: TravsoualBack
// FullName: CTree::TravsoualBack
// Access: private
// Returns: void
// Parameter: PTREE_NODE pTree 根節點
//************************************
void CTree::TravsoualBack(PTREE_NODE pTree)
{//遞歸的返回條件if (!pTree){return;}//左右根TravsoualBack(pTree->pLChild);TravsoualBack(pTree->pRChild);printf("%d ", pTree->nElement);
}//************************************
// Method: 層序遍歷
// FullName: CTree::LevelTravsoual
// Access: public
// Returns: void
//************************************
void CTree::LevelTravsoual()
{vector<PTREE_NODE> vecRoot; //保存根節點vector<PTREE_NODE> vecChild; //保存根節點的子節點vecRoot.push_back(m_pRoot);while (vecRoot.size()){for (int i = 0; i < vecRoot.size();i++){printf("%d ", vecRoot[i]->nElement);//判斷其是否左右子節點if (vecRoot[i]->pLChild){vecChild.push_back(vecRoot[i]->pLChild);}if (vecRoot[i]->pRChild){vecChild.push_back(vecRoot[i]->pRChild);}}vecRoot.clear();vecRoot = vecChild;vecChild.clear();printf("\n");}
}//************************************
// Method: GetCount 獲取元素個數
// FullName: CTree::GetCount
// Access: public
// Returns: int
//************************************
int CTree::GetCount()
{return m_nCount;
}//************************************
// Method: GetDeep 獲取節點深度
// FullName: CTree::GetDeep
// Access: private
// Returns: int
// Parameter: PTREE_NODE & pTree
//************************************
int CTree::GetDeep(PTREE_NODE pTree)
{//判斷pTree是否為空if (!pTree){return 0;}int nL = GetDeep(pTree->pLChild);int nR = GetDeep(pTree->pRChild);//比較左右子樹的深度,取最大值加 1 返回return (nL >= nR ? nL : nR) + 1;
}//************************************
// Method: GetMaxOfLeft 獲取左子樹中的最大值
// FullName: CTree::GetMaxOfLeft
// Access: private
// Returns: PTREE_NODE
// Parameter: PTREE_NODE pTree
//************************************
PTREE_NODE CTree::GetMaxOfLeft(PTREE_NODE pTree)
{//只要存在右子樹就有更大的值//是否空if (!pTree){return 0;}//判斷是否有右子樹while (pTree->pRChild){pTree = pTree->pRChild;}//返回最大值節點return pTree;
}//************************************
// Method: GetMinOfRight 獲取右子樹中的最小值
// FullName: CTree::GetMinOfRight
// Access: private
// Returns: PTREE_NODE
// Parameter: PTREE_NODE pTree
//************************************
PTREE_NODE CTree::GetMinOfRight(PTREE_NODE pTree)
{//只要存在左子樹就有更小的值//是否空if (!pTree){return 0;}//判斷是否有右子樹while (pTree->pLChild){pTree = pTree->pLChild;}return pTree;
}//************************************
// Method: LeftWhirl 左旋
// FullName: CTree::LeftWhirl
// Access: private
// Returns: void
// Parameter: PTREE_NODE & pTree
//************************************
void CTree::LeftWhirl(PTREE_NODE& pK2)
{
/*k2 k1k1 ==> k2 NX N X
*///保存k1PTREE_NODE pK1 = pK2->pRChild;//保存XpK2->pRChild = pK1->pLChild;//k2變成k1的左子樹pK1->pLChild = pK2;//k1變成k2pK2 = pK1;
}//************************************
// Method: RightWhirl 右旋
// FullName: CTree::RightWhirl
// Access: private
// Returns: void
// Parameter: PTREE_NODE & pTree
//************************************
void CTree::RightWhirl(PTREE_NODE& pK2)
{
/*k2 k1k1 ==> N k2N X X
*///保存k1PTREE_NODE pK1 = pK2->pLChild;//保存XpK2->pLChild = pK1->pRChild;//k1的右子樹為k2pK1->pRChild = pK2;//k2為k1pK2 = pK1;
}//************************************
// Method: LeftRightWhirl 左右旋
// FullName: CTree::LeftRightWhirl
// Access: private
// Returns: void
// Parameter: PTREE_NODE & pTree
//************************************
void CTree::LeftRightWhirl(PTREE_NODE& pK2)
{
/*k2 k2 Nk1 左旋 N 右旋 K1 K2N k1 [x] [x][x]
*/LeftWhirl(pK2->pLChild);RightWhirl(pK2);
}//************************************
// Method: RightLeftWhirl 右左旋
// FullName: CTree::RightLeftWhirl
// Access: private
// Returns: void
// Parameter: PTREE_NODE & pTree
//************************************
void CTree::RightLeftWhirl(PTREE_NODE& pK2)
{
/*k2 k2 Nk1 右旋 N 左旋 k2 K1N [x] k1 [x][x]
*/RightWhirl(pK2->pRChild);LeftWhirl(pK2);
}bool CTree::empty()
{return m_pRoot == 0;
}調用代碼:
#include "Tree.h"int main()
{CTree tree;tree.AddData(1);tree.AddData(2);tree.AddData(3);tree.AddData(4);tree.AddData(5);tree.AddData(6);tree.AddData(7);tree.AddData(8);tree.AddData(9);tree.AddData(10);tree.LevelTravsoual();tree.DelData(4);tree.LevelTravsoual();return 0;
}
,FinGLM 競賽獲獎項目詳解)
原理與代碼解讀)











![[pyradiomics][python]pyradiomics所有whl文件下載地址匯總](http://pic.xiahunao.cn/[pyradiomics][python]pyradiomics所有whl文件下載地址匯總)
(HarmonyOS學習第七課))



)