任務:跑通lioslam
主要參考博客
IMU+激光雷達融合使用LIO-SAM建圖學習筆記——詳細、長文、多圖、全流程_ubuntu_AIDE回歸線-GitCode 開源社區 (csdn.net)
1.不要用這一句
wget -O ~/Downloads/gtsam.zip https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
用下面的
wget -O ~/Downloads https://github.com/borglab/gtsam/archive/4.0.0-alpha2.zip
2.gtsam編譯的時間很長 用時

編譯過程中出現一大堆這種提示,不知道是干嘛的,一直彈這種東西出來,感覺有點問題

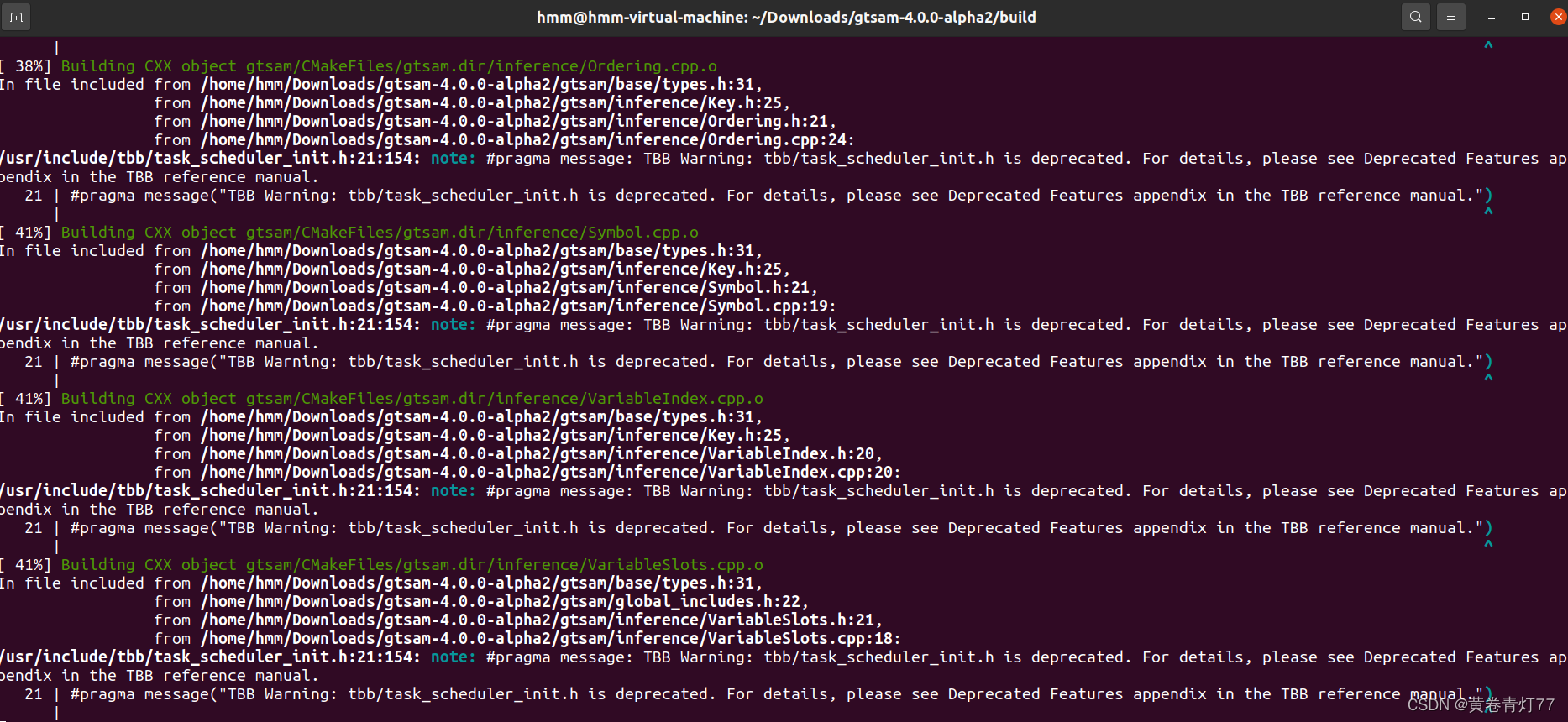

報了好多這種類型的錯誤,有關系嗎?

沒管 最后是跑通了暫時沒遇到什么影響
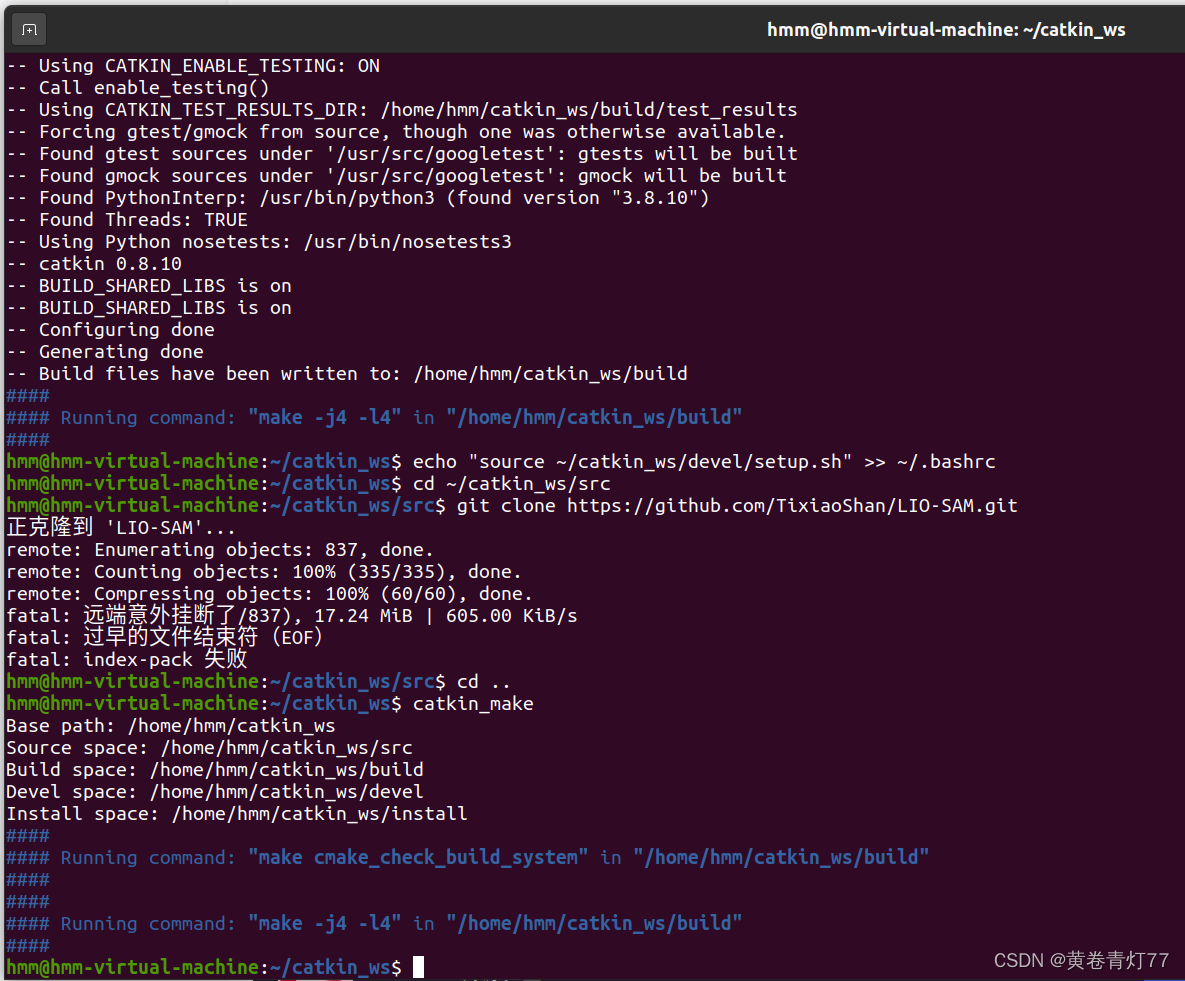
3.出現網絡問題
4.卡在71%了了 昨天是卡在80%
問題:在make編譯時,出現C++: fatal error:已殺死 signal terminated program cc1plus,
原因:內存不足
解決辦法:
臨時增加虛擬機內存方法;make過程中“fatal error ... cc1plus“_c語言_學書才淺-華為開發者聯盟HarmonyOS專區

5.
ERROR: cannot launch node of type [robot_localization/ekf_localization_node]: robot_localization
解決辦法
LIO-SAM:Ubuntu20.04下的編譯與運行_lio-sam編譯-CSDN博客
6.lioslam跑起來了 但是接受不到數據
要打開roscore
7.跑了655秒的數據,軌跡都飛到天上去了
告警 速度過大
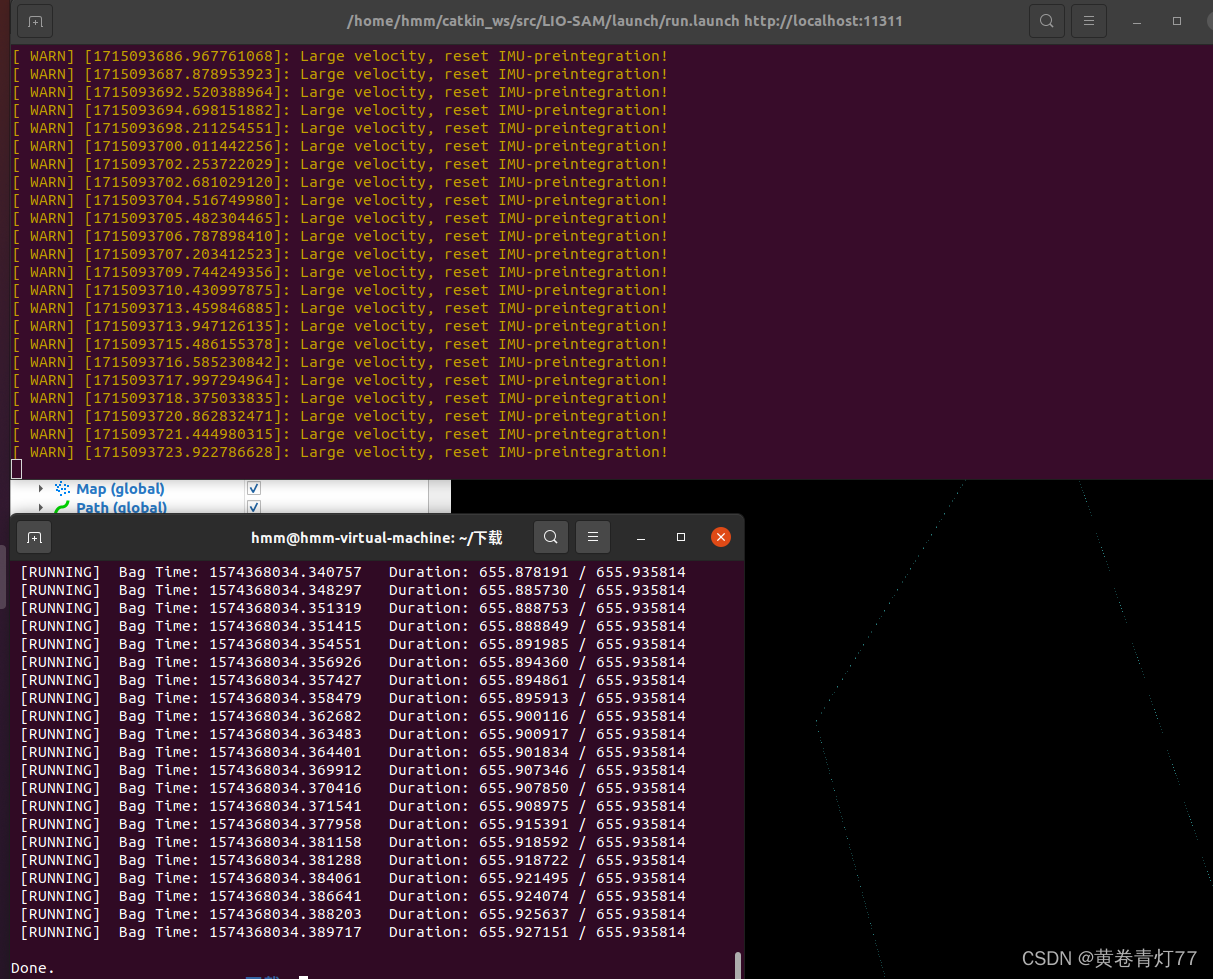
)


![[C++][數據結構]哈希3:unordered_map和unordered_set的模擬實現](http://pic.xiahunao.cn/[C++][數據結構]哈希3:unordered_map和unordered_set的模擬實現)




在圖像識別中的革命性應用:自動駕駛的崛起)










