迄今為止,輪子一般是移動機器人學和人造交通車輛中最流行的運動機構。它可達到很高的效率,
如圖所示,

而且用比較簡單的機械就可實現它的制作。
另外,在輪式機器人設計中,平衡通常不是一個研究問題。
因為在所有時間里,輪式機器人一般都被設計成在任何時間里所有輪子均與地接觸。因而,3個輪子就足以保證穩定平衡。雖然我們將在下面看到,兩輪機器人也可以穩定。
如果使用的輪子多于3個,當機器人碰到崎嶇不平的地形時,就需要一個懸掛系統以使所有輪子保持與地面接觸。輪式機器人研究傾向于把重點放在牽引、穩定性、機動性及控制問題,而不是擔心平衡。為覆蓋所有預期的地形,機器人的輪子能否提供足夠的牽引力和穩定性?機器人的輪子結構能對機器人的速度進行有級的控制嗎?
輪子運動:設計空間
正如將要看到的,當我們考慮移動機器人運動的可能技術時,可能的輪子結構有很大的空間。因為有很多數目不同的輪子類型,各有其特定的優點和缺點,故我們從詳細討論輪子開始,然后來檢驗為移動機器人傳送特定運動形式的完整的輪子構造。
輪子的設計
有四種主要的輪子類型,如圖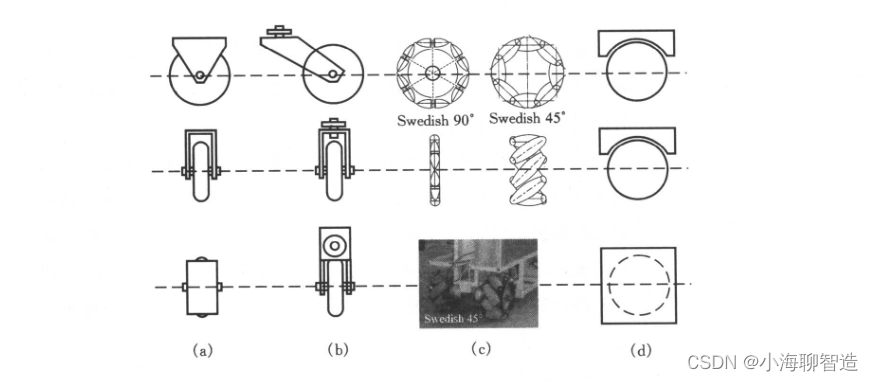
所示。
四種基本的輪子類型:
(a)標準輪:2個自由度,圍繞輪軸(電動的)和圖
2.19接觸點轉動;
(b)小腳輪:2個自由度,圍繞偏移的操縱接合點旋轉;
?瑞典輪:3個自由度,圍繞輪軸(電動的)、輥子和接觸點旋轉;
(d)球體或球形輪:技術上實現困難
在運動學方面,它們差別很大。因此輪子類型的選擇對移動機器人的整個運動學有很大的影響。標準輪和小腳輪有一個旋轉主軸,因而是高度有向的。在不同的方向運動,必須首先沿著垂直軸操縱輪子。這兩種輪的主要差別在于標準輪可以完成操縱而無副作用,因為旋轉中心經過接觸片著地;而小腳輪繞偏心軸旋轉,在操縱期間會引起一個力,加到機器人的底盤。
瑞典輪和球形輪二者的設計比傳統的標準輪受方向約束少一些。瑞典輪的功能與標準輪一樣,但它在另一方向產生低的阻力,該方向有時垂直于常規方向,如Swedish90;有時在中間角度,如Swedish45。裝在輪子周圍的輥子是被動的,輪的主軸是唯一的供有動力的連接。
這個設計的主要優點在于:雖然輪子旋轉僅沿主軸供動力(通過輪軸),輪子以很小的摩擦,可以沿許多可能的軌跡按運動學原理移動,而不僅僅是向前或者向后。
球形輪是一種真正的全向輪,經常被設計成可以沿任何方向受動力而旋轉。實現這種球形構造的一種機構模仿了計算機鼠標,提供了供動力的輥子,這些輥子擱在球的頂部,并給予旋轉的力。
無論用什么輪,在為所有地形環境設計的機器人和具有3個以上輪子的機器人中,正常情況下需要一個懸掛系統以保持輪子與地面的接觸。一種最簡單的懸掛方法是輪子本身設計成柔性的。例如,在某些使用小腳輪的四輪室內機器人情況下,制造廠家已經把軟橡膠可變形的輪胎用在輪上,制作基本的懸掛體。當然,這種有限的解決方案不能與應用中錯綜復雜的懸掛系統相比擬。在應用中,對明顯的非平坦地形,機器人需要更動態的懸掛系統。
輪子幾何特征
移動機器人輪子類型的選擇與輪子裝配或輪子幾何特征的選擇緊密相關。移動機器人的設計者在設計輪式機器人的運動機構時,必須同時考慮這兩個問題。為何輪子的類型和輪子的幾何特征如此重要?因為機器人的三個基本特征由這些選擇所支配:機動性,可控性和穩定性。
汽車大都為高度標準化的環境(公路網絡)而設計,與其不同的是,移動機器人則是為應用在種類繁多的環境而設計。汽車全部共享相同的輪子結構,因為在設計空間中存在一個區域,使得它們對標準化環境(鋪好的公路)的機動性、可控性和穩定性最大。可是,不同的移動機器人面臨各種不同環境,沒有單一的輪子結構可以使這些品質最大化。所以,你會看到移動機器人的輪子結構種類繁多。實際上,除了為道路系統設計的移動機器人外,很少機器人使用汽車的Ackerman輪子結構,因為它的機動性較差(圖2.20)
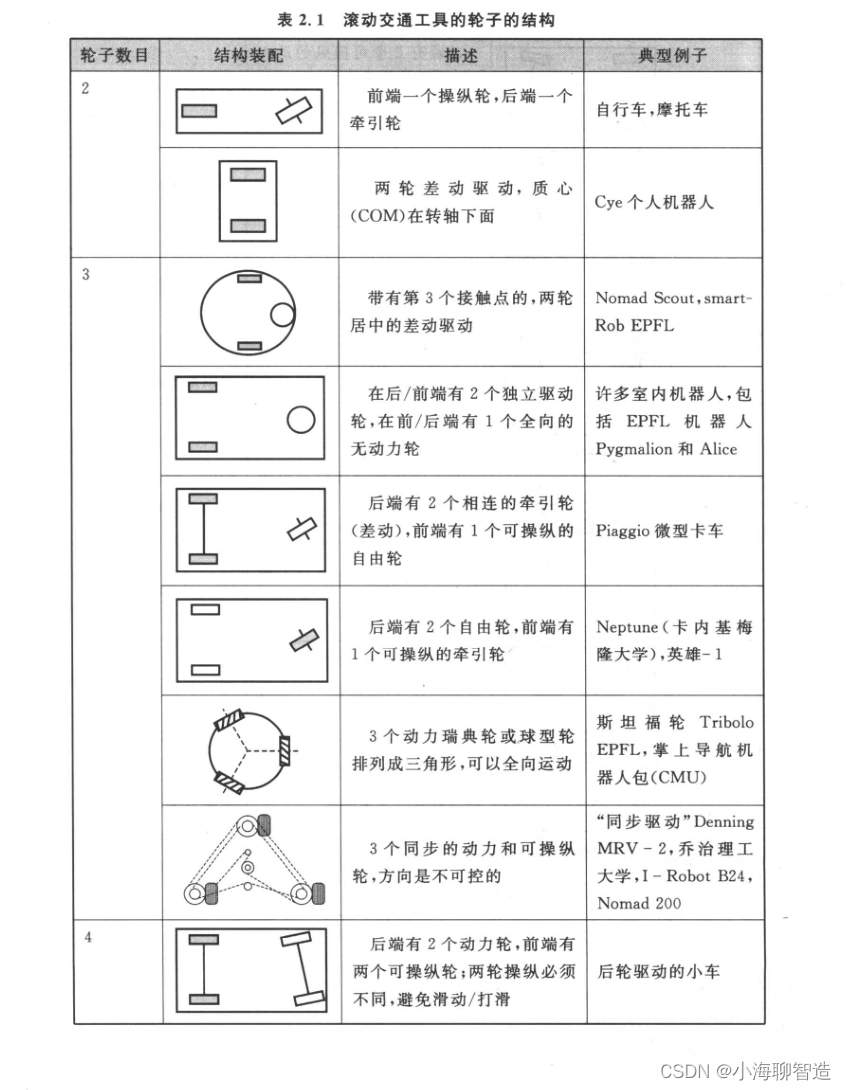
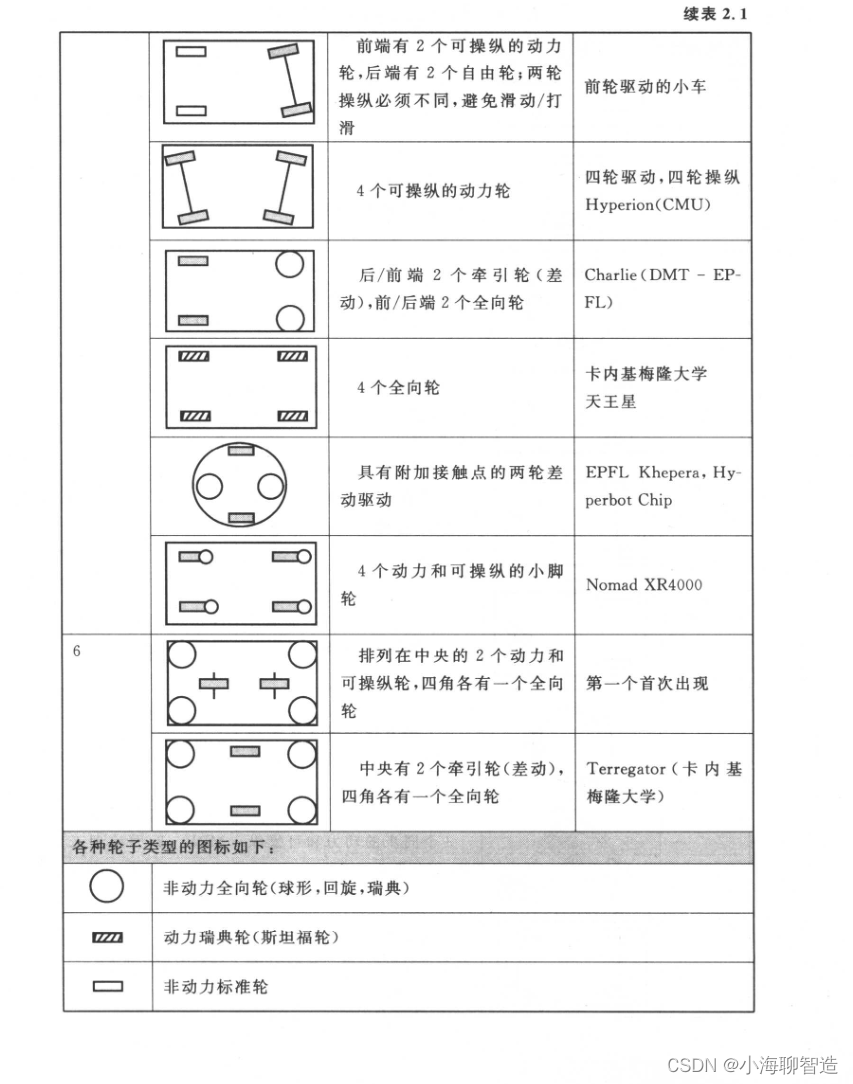
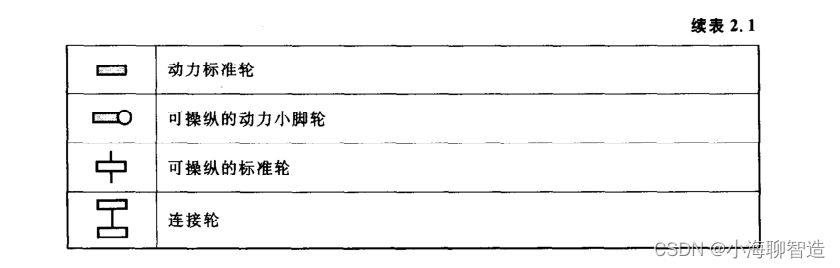
表2.1給出了輪子結構的概述,按輪子數目排序。表中描述了特殊輪子類型的選擇和機器人底盤上它們幾何結構的兩個方面。我們注意到,所示的某些輪子結構在移動機器人的應用中很少用到。例如,兩輪自行車裝配,其機動性中等,可控性差。像單腿跳躍機,它根本不能靜止地站著。不過,表中提供了在運動機器人設計中可能用到的許多種類輪子結構的說明。
表2.1中種類的數目是很多的。不過,這里列出了重要的趨向和分組,它可幫助我們理解各結構的優點和缺點。下面,根據以前確
Navlab【是第一個自主式高速公路交通工具。它使用視覺和雷達圖 2.20傳感器操作和控制油門,由CMU開發
穩定性
令人驚奇的是,靜態穩定所要求的最小輪子數目是2個。如上所述,如果質心在輪軸下面,一個兩輪差動驅動的機器人可以實現靜態穩定。Cye就是使用這種輪子結構的商業移動機器人
 Cye,現有商業化的家用機器人,它可以在家里做真空吸塵和傳遞員由AethonInc.(http://www.aethon.com)制造。
Cye,現有商業化的家用機器人,它可以在家里做真空吸塵和傳遞員由AethonInc.(http://www.aethon.com)制造。
可是,在普通的環境下,這種解決方案要求輪子的直徑大得不切實際。
動力學也可引起兩輪機器人以接觸的第3個點撞擊地面,例如,從靜止開始要有足夠大的電機轉矩。常規情況下,靜態穩定要求至少有3個輪子,且需要警告的是:重心必須被包含在由輪子地面接觸點構成的三角形內。增加更多的輪子可以進一步改善穩定性,雖然一旦接觸點超過3個后,幾何學的超靜態性質會要求在有崎嶇不平的地形時具有某種形式的靈活的懸掛系統。
機動性
一些機器人是全向的,這意味著它們可以在任何時候沿著地平面(x,y)向任意方向運動,包括機器人繞它自己的垂直軸轉。
這層次的機動性需要能朝一個以上方向運動的輪子。所以,全向機器人經常使用有動力的瑞典輪或球形輪。天王星(Uranus)是個很好的例子,如圖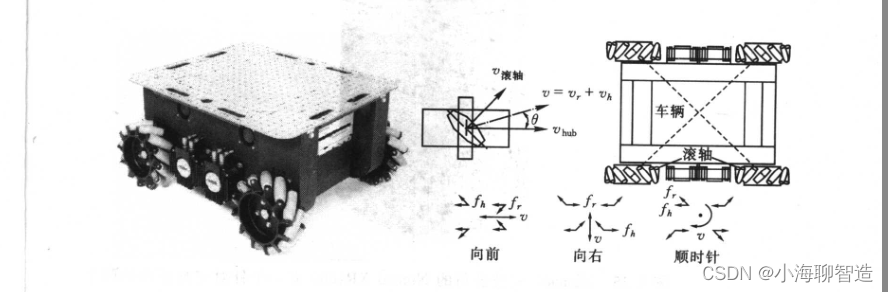
所示。這個機器人使用4個瑞典輪,能獨立地旋轉和平移且不受限制。
一般來說,帶有瑞典輪和球形輪的機器人由于構造全向輪的機械上約束,其地面清潔度有某些限制。在解決這種地面清潔度問題的同時,一個令人感興趣的最新解決全向導航的方案是四小腳輪結構。在這種結構中,各小腳輪主動地被操縱,且平移機器人是真正全向的。因為,即使小腳輪的朝向垂直于行走所期望的方向,通過操縱這些輪子,機器人仍能向期望的方向移動。因為垂直軸偏離了地面接觸路徑,這個操縱運動的結果就是機器人的運動。
在研究領域中,可實現高度機動性的其他類型的移動機器人是很普遍的,它們只比全向結構的機器人稍微差一點。這種類型的機器人,在特定方向上的運動可能開始需要一個旋轉運動。
機器人的中央有一個圓底盤和轉動軸,使得這種機器人可以旋轉而不改變它的地面腳印。這種機器人中最普遍的是兩輪差動驅動的機器人,在那里2個輪子圍繞機器人的中心點轉動。為了穩定,根據應用的特點,也許要用1~2個附加的地面接觸點:
與上面的結構相反的是我們在汽車中常見的Ackerman操縱結構。這種車輛典型的地方是有一個比小汽車大的旋轉直徑。而且,它在靠邊運動時需要一個由重復向前和向后改變方向組成的停車調動。盡管如此,Ackerman操縱幾何結構在業余愛好的機器人市場中仍一直特別地流行。這里,開始用一個遙控的賽車工具包,然后把感知和自治功能加到現有的機械機構,就可以制作機器人了。另外,Ackermman操縱的有限機動性有一個重要的優點:它的定向性和操縱的幾何結構,向它提供了在高速旋轉中非常好的橫向穩定性。
可控性
一般來說,可控性和機動性之間存在逆相關性。例如,對全向裝置,諸如四小腳輪結構,要求效果顯著的處理能把期望的轉動和平移的速度轉換成單個輪子的命令。而且,這種全向裝置經常在輪子上有較大的自由度。例如,瑞典輪沿著輪周有一組自由的子。這些自由度造成滑動的積累,導致航位推測準確度的降低并增加了設計的復雜性。
對一個特定的行走方向,控制全向機器人也比較困難,而且當它與較小機動性裝置比較時,往往準確度較低。例如,一個Ackerman操縱車輛,通過鎖住可操縱輪和驅動它的驅動輪就可以簡單地走直線。在差動驅動的車輛情況下,必須精確地按同樣的速度分布圖驅動裝在輪上的2個電機。考慮到輪子間和電機間的差異以及環境的差異,這可能是困難的。對于具有四輪的全向驅動,如Uranus機器人,它有4個瑞典輪,問題更為困難。因為對在理想直線上行走的機器人,必須精確地按相同速度驅動所有的4個輪子。
總之,沒有“理想”的驅動結構可以同時使穩定性、機動性和可控性最大化。各移動機器人的應用對機器人設計問題加上唯一的約束,而設計者的任務就是在這個折衷空間中,選擇最合適的可行的驅動結構。











![[AutoSar]lauterbach_001_ORTI_CPUload_Trace](http://pic.xiahunao.cn/[AutoSar]lauterbach_001_ORTI_CPUload_Trace)




)

)
)