1?? 背景概述
隨著國防信息化和智能化進程的不斷加快,虛擬仿真系統 與 智能視覺算法平臺 正逐步成為現代化裝備研發、測試驗證與戰術訓練的重要技術支撐。相比傳統的靜態建模或離線推演,新一代作戰仿真與智能系統更強調 實時性、感知能力與動態交互,這對前端傳感器接入、視頻數據處理與系統集成提出了更高的要求。
核心應用領域涵蓋:
-
🚀 裝備級虛擬作戰環境仿真
構建高仿真的虛擬戰場環境,接入真實或仿真的傳感器數據,提升推演與訓練的真實性與沉浸感。 -
🎯 智能武器系統的視覺感知與目標識別
基于視頻流的目標檢測、行為識別與環境感知,支撐武器系統的自主決策與協同作戰。 -
🗺? 戰術推演與多模態感知數據融合
融合多源視頻、雷達、紅外等多模態數據,提升戰術推演系統的綜合感知與決策分析能力。 -
🕹? 視景仿真與人機交互系統
將多路實時視頻流與三維場景、仿真模型集成,實現人機交互與戰術指揮訓練的可視化控制。
在這些應用體系中,多路實時視頻流的高效接入與處理,不僅是感知層的重要基礎,更是系統能否支撐高強度任務負載的關鍵。
然而,實際系統所面臨的挑戰遠不止于視頻接入:
-
來自不同廠商、不同協議的異構攝像頭與傳感器,
-
不同網絡環境下的視頻傳輸穩定性與延遲控制,
-
多路視頻并發接入與解碼處理帶來的系統資源瓶頸,
-
與仿真引擎、算法處理模塊的接口兼容與集成復雜度。
如何在虛擬仿真系統與視覺算法平臺中,實現高效、低延遲、可擴展的多路視頻流接入與管理,已成為行業系統架構與工程落地的關鍵技術課題。
2?? 技術需求與系統挑戰
在軍工級虛擬仿真與智能視覺應用場景下,系統通常需要接入多源異構的前端視頻流,
并在高并發、低延遲的前提下,完成渲染、分析與業務聯動。這對視頻流接入、傳輸與管理提出了超出傳統視頻播放器的嚴苛要求。
🎯 核心技術需求
| 需求項 | 詳細要求 |
|---|---|
| 高并發多路接入 | 系統需同時接入數多路 RTSP 實時視頻流,要求播放實例獨立管理,資源合理分配,避免互相干擾。 |
| 超低延遲處理 | 保證視頻接入與處理鏈路的端到端延遲可控(通常 < 200ms),以滿足戰術推演、仿真反饋與視覺算法對實時性的要求。 |
| 高穩定性與可靠性 | 支持 7×24 小時穩定運行,具備自動重連、斷鏈恢復與異常保護機制,確保系統在復雜網絡環境下仍能持續工作。 |
| 可集成化與接口友好 | 提供標準化的 API 與靈活的二次開發接口,易于嵌入到仿真引擎、數據處理模塊或視覺算法框架,避免額外的適配開發負擔。 |
| 多協議兼容與擴展性 | 除 RTSP 協議外,具備拓展支持其他視頻接入協議(如 RTMP、GB28181)的能力,適配多源設備環境。 |
| 數據輸出與處理友好性 | 支持多種數據回調方式(YUV、RGB、裸流),方便上層系統進行實時處理、視覺分析或錄制存檔。 |
| 跨平臺與資源優化 | 能在 x86、ARM 架構下運行,支持硬件加速,具備良好的資源占用控制,適用于邊緣計算終端或高性能仿真服務器部署。 |
? 系統實施中的實際挑戰
1?? 異構設備與協議適配難度大
軍工場景下,前端傳感器或攝像頭多來自不同廠家,存在協議實現差異、標準不統一、兼容性差等問題,需要播放內核具備強兼容性與協議健壯性,避免因兼容性問題導致視頻接入不穩定。
2?? 網絡波動與鏈路不可靠性
系統部署環境多涉及專網、軍用網絡或野外測試場景,網絡質量參差不齊,易出現延遲波動、丟包、鏈路中斷等情況,這要求播放器具備完善的異常檢測、超時控制與鏈路重建能力,防止系統級的播放失敗或數據中斷。
3?? 多路高并發帶來的系統資源瓶頸
虛擬仿真或算法測試系統常需同時接入大量視頻流,傳統播放器或開源庫難以在多路環境下保持資源可控,易出現內存泄漏、線程沖突或 CPU 占用暴漲,導致系統不穩定甚至崩潰,阻礙長時間運行。
4?? 實時性與渲染解碼的平衡問題
仿真系統與視覺算法要求盡可能低的延遲,但視頻解碼、渲染、算法處理往往會帶來不可忽視的處理耗時,如何在延遲控制與系統負載之間取得平衡,成為系統設計與工程實現的核心難題。
5?? 與上層系統的集成復雜度
傳統播放器往往以完整播放鏈路為主,缺乏靈活的數據輸出與控制接口,在與仿真系統、算法模塊或三維引擎(如 Unity/Unreal)集成時,容易出現適配困難、開發周期拉長或功能受限的問題。
? 技術需求總結
軍工級仿真與視覺應用的多路視頻接入系統,不僅需要滿足基本的視頻播放功能,更要具備高并發管理、異常自恢復、低延遲傳輸、以及對上層業務的良好集成與擴展能力。
這對 RTSP 播放器 SDK 的性能、架構設計與工程實現能力,都提出了超出傳統視頻播放場景的專業化挑戰。
3?? 基于大牛直播SDK的高性能 RTSP 播放器技術方案
針對軍工級虛擬仿真與智能視覺應用對多路視頻接入的嚴苛要求,大牛直播SDK 提供了專業級的 高性能 RTSP 播放器解決方案,以其高并發、低延遲、強穩定的內核設計,有效解決了傳統開源播放器在工業與仿真場景中的性能瓶頸與集成難題。
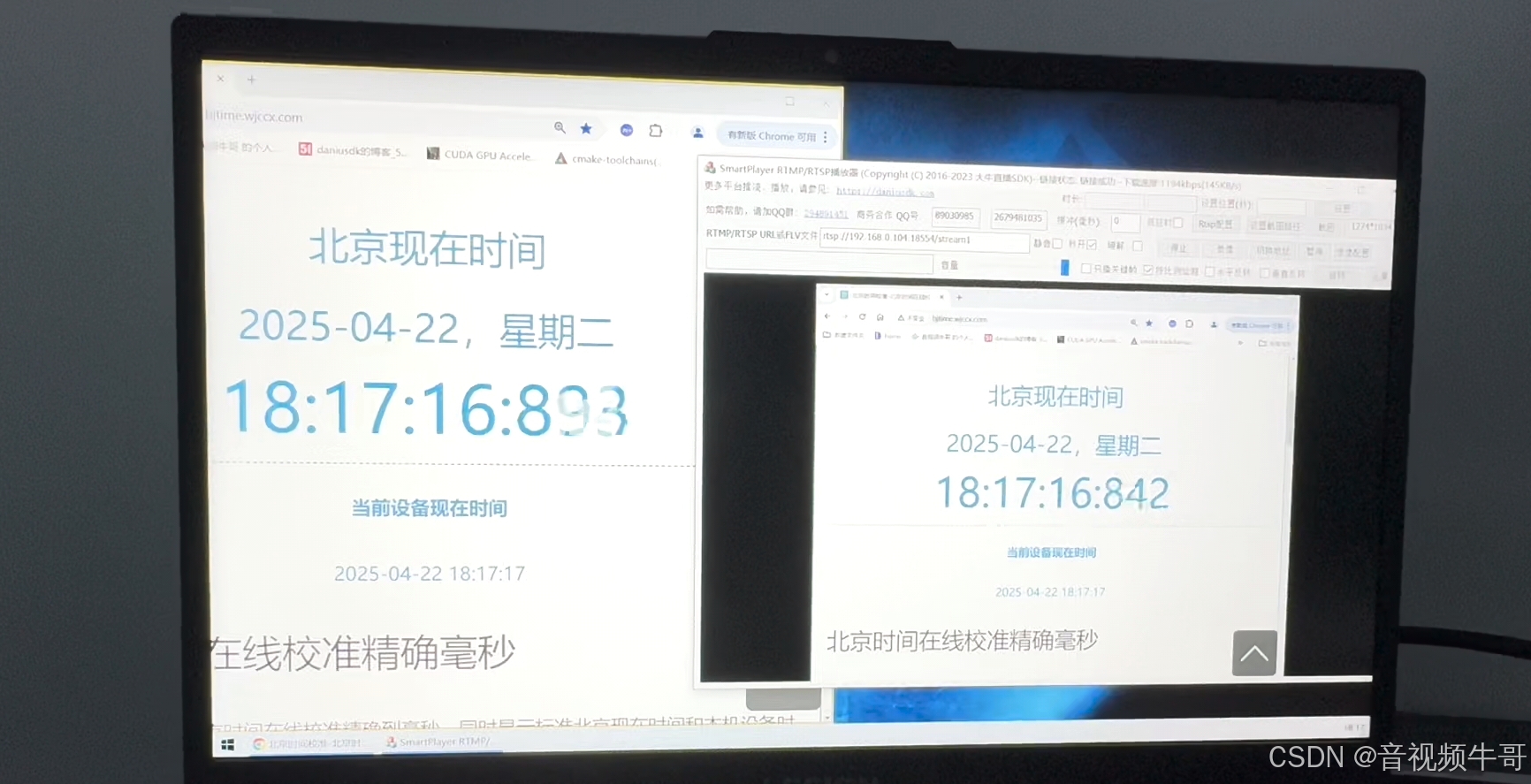
windows平臺rtsp播放器延遲測試
🔷 核心技術特性
| 功能模塊 | 技術亮點 |
|---|---|
| RTSP 拉流內核 | 基于自研輕量級 RTSP 協議棧,支持 TCP/UDP 傳輸模式,具備網絡異常檢測、鏈路斷開自動重連與丟包自適應機制,確保復雜網絡環境下的接入穩定性。 |
| 超低延遲解碼引擎 | 原生支持軟硬件解碼,端到端解碼延遲可控制在 100ms~200ms,滿足仿真與算法對低延遲的嚴苛需求。 |
| 高并發多實例管理 | 支持單進程內啟動多路 RTSP 播放實例,實例間資源獨立,防止互相干擾,具備高效的線程調度與資源回收機制,適合高并發場景長期運行。 |
| 多格式數據回調機制 | 提供 YUV、RGB、H.264/H.265 裸碼流回調接口,支持同步/異步處理,方便對接圖像算法、目標檢測、行為分析等上層視覺處理模塊。 |
| 可控化播放引擎 | 支持啟動、停止、擴展錄像、快照、實時音量調節等精細化控制,內置實時狀態回調、錯誤信息反饋與事件觸發機制,方便開發者實現業務邏輯聯動與異常處理。 |
| 跨平臺與硬件兼容 | 適配 x86、ARM、國產化芯片平臺,Windows、Android、Linux、iOS全覆蓋,支持多種嵌入式與服務器級硬件環境,易于集成至工業 PC、車載系統或邊緣計算節點。 |
🛠? 技術架構示意
[前端 RTSP 攝像頭 / 傳感器] │[大牛直播SDK RTSP 播放器內核]│
[視頻渲染模塊] [視覺算法模塊] │ │[仿真系統] [數據處理/分析引擎]
🔌 典型集成模式
-
? 與虛擬仿真系統集成 ——
播放器作為多路視頻接入組件,嵌入仿真引擎(如 Unity3D)或定制三維可視化系統,實現戰術態勢可視化與多屏互動。 -
? 與智能視覺算法模塊聯動 ——
通過 YUV/RGB 數據回調,直接送入 AI 算法或計算機視覺處理單元,用于目標識別、行為分析、事件檢測與數據挖掘。 -
? 與工業控制與管理系統對接 ——
播放器提供播放狀態、異常事件的實時回調,便于接入監控系統、調度平臺或工業信息化系統,實現智能聯動與自動化控制。
📝 應用效果總結
| 應用維度 | 實際效果 |
|---|---|
| 并發性能 | 單實例支持多路流暢運行,長時間穩定 |
| 解碼延遲 | 可控在 100ms ~ 200ms,符合虛擬仿真與算法處理需求 |
| 資源占用 | 多實例環境下資源均衡分配,避免異常占用 |
| 接入穩定性 | 網絡異常時可自動重連,具備弱網下穩定推流能力 |
| 開發集成 | 提供標準化接口,支持 C/C++/C#/WPF/QT/Android/object-c 多語言調用 |
? 技術價值總結
大牛直播SDK 的高性能 RTSP 播放器,
不是傳統意義上的“播放器”,
而是一套面向工業與智能化場景的 多路視頻接入與數據分發引擎。
它將視頻接入、傳輸、解碼、控制與數據輸出深度融合,
為軍工虛擬仿真、視覺算法應用與工業視頻系統提供了穩定、靈活、可擴展的技術底座。
4?? 技術實踐中的典型應用
基于 大牛直播SDK RTSP 播放器 的多路接入與低延遲特性,在虛擬仿真、智能視覺與人機交互系統的多類實際項目中,展現出良好的應用效果與工程適應性。
🎯 場景一:虛擬作戰環境中的多路視頻實時接入
在裝備級或戰術級虛擬作戰仿真系統中,實時接入來自多源傳感器或仿真攝像頭的視頻流,
是實現作戰態勢可視化與實時反饋的核心基礎。
應用特點:
-
同時接入多路前端視頻,統一管理與調度
-
基于 SDK 的超低延遲拉流,確保虛擬場景中的態勢與實況同步
-
與仿真引擎深度集成,支持異步視頻流播放與仿真主控系統的同步聯動
-
可擴展至多種網絡與傳輸環境,適用于固定、移動與邊緣節點部署
典型應用效果:
在戰術推演或裝備測試仿真中,前端傳感器畫面通過 SDK 實時拉取,
快速渲染于作戰場景,輔助指揮決策與環境感知,
實現 “所見即所得” 的戰術態勢展示。
🎯 場景二:智能視覺算法測試與目標檢測系統
在視覺算法訓練、目標檢測或行為分析系統中,對接實時視頻流并直接傳入算法處理模塊,對數據的完整性、時序性與并發處理能力有極高要求。
應用特點:
-
通過 SDK 的 YUV/RGB 數據回調機制,直接將解碼后的視頻數據傳遞給算法引擎
-
保證幀級時間戳與原始視頻數據的完整性,確保算法測試結果的準確性
-
支持跨平臺異構算力環境,適合本地測試或邊緣側 AI 推理部署
-
可按需控制數據流量、幀率與解析度,優化算法模型的測試與訓練效率
典型應用效果:
在智能監控、無人系統視覺識別項目中,SDK 作為視頻輸入組件,為 AI 模型提供高效、穩定的視頻數據輸入,支持目標檢測、跟蹤與異常行為分析的實時處理,幫助系統縮短算法訓練周期、提升檢測準確率。
🎯 場景三:人機交互與多屏仿真協同呈現
高端仿真系統與指揮可視化平臺,通常需要多屏、多視角的視頻協同呈現,并支持與用戶的交互操作,滿足戰術演練或可視化指揮的需求。
應用特點:
-
支持多窗口、多畫面的視頻同步渲染與切換
-
可靈活嵌入現有圖形渲染引擎,如 OpenGL、DirectX 或 Unity/Unreal,輕松實現 2D/3D 場景下的實時視頻融合與交互
-
支持多用戶同時操作與畫面聯動,適合戰術協同與指揮演練場景
-
視頻渲染與交互響應并行處理,保障系統的流暢性與實時反饋
典型應用效果:
在指揮中心或仿真訓練場景中,用戶可通過交互式終端控制多路視頻的切換、縮放與多屏聯動,實現戰術態勢展示、環境監控與可視化指揮的深度結合,打造集態勢感知、指揮控制與協同作戰于一體的綜合交互系統。
? 應用價值總結
無論是前端數據采集、算法測試驗證,還是多屏互動與場景呈現,大牛直播SDK的多路 RTSP 播放器模塊,都能以其高性能、低延遲與高度可控的特性,成為虛擬仿真與智能系統中的關鍵視頻接入與管理核心。
5?? 技術優勢總結
在工業仿真、智能視覺與復雜系統集成應用中,選擇合適的視頻接入與處理組件,直接影響系統的性能上限與工程開發周期。大牛直播SDK RTSP 播放器,在多路并發處理、延遲控制、集成能力與系統穩定性等關鍵技術指標上,相較于通用播放器或開源協議棧,展現出明顯的工程優勢。
| 對比維度 | 大牛直播SDK RTSP 播放器 | 通用播放器 / 開源協議棧 |
|---|---|---|
| 多路并發處理 | 內置多實例管理,支持單進程多實例穩定運行,資源獨立、互不干擾,適合大規模部署 | 通常基于單實例,缺乏高并發支持,易出現資源爭搶或性能瓶頸 |
| 低延遲鏈路控制 | 專為低延遲優化,支持端到端100-200ms,滿足仿真與算法實時性需求 | 不具備延遲控制,受緩沖機制影響,延遲不可控 |
| 靈活數據回調機制 | 原生支持 YUV/RGB/裸碼流回調,便于直接接入算法模塊或二次處理 | 多數未開放回調或需要二次開發,增加集成復雜度 |
| 硬件加速與平臺適配 | 內置多平臺硬件加速,接口簡潔,開箱即用 | 硬件加速支持不統一,集成復雜,需自行封裝 |
| 系統穩定性與容錯 | 工業級設計,支持 7×24 持續運行,具備異常檢測與自動恢復機制 | 穩定性依賴開發者維護,斷鏈與異常處理能力薄弱 |
| 開發集成與接口易用性 | 提供標準化 C/C++/C#/QT/WPF/Android/Object-C 接口,具備良好文檔與示例,易于快速集成 | 接口低層次,開發難度大,需耗費額外適配與封裝時間 |
? 核心優勢總結
-
🏆 高并發·強穩定:支持高負載環境下的多路接入與長時間穩定運行
-
? 低延遲·高響應:優化的數據處理鏈路,確保關鍵場景下的實時性
-
🛠 易集成·可擴展:靈活的數據回調與標準化接口,縮短集成開發周期
-
🖥 硬件友好·跨平臺:支持多種算力平臺,適合服務器、邊緣節點與嵌入式系統
大牛直播SDK RTSP 播放器
是一款專為高可靠性與專業場景打造的視頻接入與數據處理引擎,既能滿足工業與軍工級系統的嚴苛技術要求,又兼顧開發效率與系統集成的實際落地需求,成為多路視頻處理與智能視覺系統中的首選技術組件。
6?? 面向未來的應用展望

隨著智能化裝備、虛擬仿真系統與多模態感知技術的不斷演進,多路視頻接入與處理已不再是單純的傳輸與播放功能,而是向著 智能協同、系統集成與邊緣智能化 方向加速發展。
基于大牛直播SDK 的 RTSP 播放器能力,其在未來軍工仿真、智能視覺與多場景融合系統中的應用前景,將主要體現在以下幾個方向:
🛠 與仿真引擎的深度融合 —— 構建模塊化、插件化的仿真接入組件
傳統的仿真系統往往需要針對特定的協議或設備做專門適配,未來的趨勢是將 RTSP 播放功能深度封裝為 插件化組件,可直接掛載于主流仿真引擎(如 Unity、Unreal 或定制仿真內核),實現“即插即用”的多路視頻接入,大幅降低系統集成與后續維護的復雜度,推動仿真開發向標準化與模塊化方向發展。
🧠 與智能視覺算法的協同演進 —— 實現智能事件驅動的仿真感知系統
未來的仿真系統不僅是“看得見”,更是“看得懂”。通過與智能視覺算法(如目標識別、行為分析、異常檢測)的聯動,多路視頻播放器不再只是數據通道,而是成為 事件驅動的智能前端,在邊緣側實現初步感知與篩選,只將關鍵事件或高價值數據流推送至仿真或指揮系統,降低數據處理負載,提升決策響應速度。
?? 支持邊緣計算與云端協同 —— 打造分布式仿真與智能處理平臺
隨著邊緣計算與分布式架構的快速發展,多路視頻處理能力將更多下沉至邊緣節點,與云端形成協同工作模式,實現 邊緣側實時預處理 + 云端集中管理與調度 的混合部署,為分布式虛擬仿真、遠程協作與大規模視覺數據管理提供技術支撐。
未來的多路視頻接入系統,將是云邊協同、彈性可控、智能分發的綜合解決方案。
🔄 多協議支持與標準兼容 —— 滿足多源數據接入與開放生態建設
面向多場景的系統集成需求,
單一 RTSP 協議已難以覆蓋全部應用,
未來的播放器內核將持續擴展多協議兼容能力,
包括但不限于:
-
GB28181 —— 滿足行業標準化視頻接入需求
-
RTMP ?—— 兼容主流流媒體與內容分發平臺
通過標準化接口與多協議互通,為不同系統、不同設備、不同業務場景提供更廣泛的集成支持,推動形成開放、兼容的智能視頻接入生態。
? 展望總結
未來的視頻接入與處理,將不再是單點功能模塊,而是嵌入到智能仿真、AI 感知、云邊協同與多模態融合中的關鍵基礎設施。
大牛直播SDK 將持續深耕多路視頻接入與智能協同領域,為行業用戶構建穩定、智能、開放的視頻處理平臺,助力智能仿真、視覺系統與多場景融合應用邁向更高水平的數字化與智能化。


















-狀態欄)
