https://github.com/datawhalechina/ai-hardware-robotics
參考資料地址
具身智能(Embodied AI) 具身智能 = 智能的大腦 + 行動的身體。
比例(Proportional)、積分(Integral)、微分(Derivative)
目錄
- 具身智能概述
- 重要三要素 身體 、大腦 、環境
- 發展的脈絡
- 面臨的挑戰
- PID_control
- 工作原理
- c語言示例代碼
- 舉例分析 matlab-simulink
具身智能,指的是能夠通過 物理身體(如機器人、自動駕駛汽車等)在真實世界中進行感知、交互和學習的智能系統。它強調智能體必須擁有一個“身體”(Body),并通過這個身體與環境互動,從而獲得對世界更深層次、更符合物理規律的理解。
具身智能概述
重要三要素 身體 、大腦 、環境
- 身體(Body):智能體的物理形態,包括各種傳感器(如攝像頭、激光雷達、觸覺傳感器)用于感知,以及執行器(如電機、機械臂、輪子)用于行動。
- 大腦(Brain):即智能算法的核心,負責處理來自傳感器的數據,進行思考、決策,并向執行器發出指令。這通常涉及到深度學習、強化學習、大語言模型等前沿AI技術。
- 環境(Environment):智能體所處的物理世界。它是智能體學習和實踐的舞臺,充滿著不確定性、動態變化和復雜的物理規律。
發展的脈絡
第一階段(20 世紀中葉 - 20 世紀末):
- 理論構想的提出與早期實體機器人的嘗試。控制論創始人等率先提出機器與環境交互的理念,為具身智能奠定理論基礎。
- 標志性成果是世界首臺移動機器人 Shakey 的誕生,它首次實現了感知、推理和行動的系統整合,雖行動遲緩,但開啟了具身智能從概念到實體的探索。
第二階段(21 世紀初 - 2020 年): - 深度學習技術推動機器人感知與學習能力的躍升。算力提升讓計算機視覺技術成熟,賦予機器人更敏銳的 “視覺”;強化學習使機器人能通過試錯自主學習復雜技能。
- 突出成果體現在運動控制與平衡能力的飛躍,以波士頓動力為代表,其大狗機器人、Atlas 人形機器人等展現了具身智能在動態運動上的驚人水平。
第三階段(2021 年 - 至今): - 大語言模型(LLM)成為具身智能的 “大腦”,帶來范式轉移。LLM 的通用理解和推理能力,讓機器人能理解復雜指令并分解為具體行動步驟。
- 代表性突破包括谷歌 RT-2 模型實現 “視覺 - 語言 - 行動” 端到端控制、特斯拉 Optimus 依托自動駕駛技術打造通用人形機器人、Figure AI 與 OpenAI 合作整合對話推理能力,推動具身智能向通用化邁進。
面臨的挑戰
-
核心挑戰:
“Sim-to-Real”的鴻溝: 在模擬器中訓練好的模型,轉移到現實世界時往往會“水土不服”,因為現實世界充滿了模擬器無法窮盡的細節和意外。 -
泛化能力: 如何讓機器人在面對從未見過的物體和環境時,依然能做出正確的決策和行動,這是實現“通用”的關鍵。
-
數據稀缺: 與互聯網上取之不盡的文本和圖片數據不同,高質量的機器人交互數據既昂貴又難以獲取。
-
安全性與倫理: 一個擁有強大物理能力的AI系統,如何確保其行為的安全、可控和符合人類倫理,是一個必須嚴肅對待的問題。
PID_control
- 首先學習 PID控制算法 掌握基礎控制原理
- 了解不同控制參數對系統響應的影響
- 嘗試調整PID參數以獲得最佳控制效果
- 進階學習高級控制算法(待更新)
- PID控制算法是工業自動化中最常用的控制算法之一。
- 什么是PID算法:PID通過計算當前輸出與期望輸出之間的誤差,并根據該誤差的比例(P)、積分(I)和微分(D)來調整控制輸入,從而實現對系統的精確控制。
工作原理
PID控制器通過以下三個基本組件來計算控制輸入:
- 比例(P):【快速相應誤差】直接對誤差進行比例放大,可以迅速減少誤差,但可能導致系統不穩定。
- 舉例:如果當前溫度 20℃(誤差 5℃),P 環節會讓空調加大制熱功率(比如開 50% 功率);如果誤差減小到 1℃,功率就降低到 10%。
- 特點:能快速縮小誤差,但單獨使用時,可能因為 “慣性” 導致系統在目標值附近波動(比如溫度超過 25℃后,空調才開始減小功率),難以完全消除誤差(稱為 “穩態誤差”)。
- 積分(I):【消除累積誤差】對誤差進行積分,可以消除系統的靜態誤差,但可能導致系統響應變慢。根據誤差的 “累積時間” 調整 —— 如果誤差長期存在(比如溫度一直差 1℃),積分環節會逐漸加大控制力度,直到誤差徹底消除。
- 舉例:如果溫度穩定在 24℃(誤差 1℃),P 環節可能認為誤差小而停止調整,但 I 環節會累計這個 1℃的誤差(比如累計 10 分鐘后),驅動空調略微加大功率,最終讓溫度達到 25℃。
- 特點:解決 P 環節的 “穩態誤差”,但響應較慢,單獨使用可能導致系統超調(比如溫度超過 25℃后還在加熱)。
- 微分(D):【預測誤差變化趨勢】對誤差的導數進行預測,可以預測誤差的變化趨勢,從而提前進行調整,提高系統的響應速度和穩定性。
- 舉例:如果溫度從 20℃快速升到 24℃(1 分鐘內升了 4℃),D 環節會預測 “可能很快超過 25℃”,提前讓空調減小制熱功率,避免溫度過高。
- 作用:根據誤差的 “變化速度” 調整 —— 如果誤差突然變大(或變小),D 環節會提前輸出反向控制信號,抑制系統的劇烈變化。
e(t)e(t)e(t) 是當前誤差,即期望輸出與實際輸出之間的差值。
- KpK_pKp? 是比例系數。
- KiK_iKi? 是積分系數。
- KdK_dKd? 是微分系數。
實現步驟
- 計算誤差:計算當前輸出與期望輸出之間的誤差。
- 比例項:根據比例系數和誤差計算比例項。
- 積分項:對誤差進行積分,并根據積分系數計算積分項。
- 微分項:計算誤差的導數,并根據微分系數計算微分項。
- 計算控制輸入:將比例項、積分項和微分項相加,得到控制輸入。
- 應用控制輸入:將控制輸入應用于被控系統。
整體公式:
u(t)=Kp?e(t)+Ki∫0te(τ)dτ+Kd?de(t)dtu(t) = K_p \cdot e(t) + K_i \int_{0}^{t} e(\tau) \, d\tau + K_d \cdot \frac{de(t)}{dt}u(t)=Kp??e(t)+Ki?∫0t?e(τ)dτ+Kd??dtde(t)?
- 一般情況下,我們是通過波形圖的穩定以及響應來判定PID算法的效果的。
- 一般情況下,我們可以先設置一個較大的比例系數,然后逐漸減小比例系數,直到系統的響應變得平滑。
- 積分項的作用是消除系統的靜態誤差,但是積分項的引入會使系統的響應變慢。
- 微分項的作用是預測誤差的變化趨勢,從而提前進行調整,提高系統的響應速度和穩定性。
一般來說,位置PID控制算法可以穩定大部分的控制,但是根據不同的應用情景,也有不同的優化算法
- 積分分離PID
u(k)=KPe(k)+βKI∑i=0ke(i)+KD[e(k)?e(k?1)]u(k) = K_P e(k) + \beta K_I \sum_{i=0}^{k} e(i) + K_D \left[ e(k) - e(k - 1) \right]u(k)=KP?e(k)+βKI?i=0∑k?e(i)+KD?[e(k)?e(k?1)] - 變速積分的PID控制
u(k)=KPe(k)+KI∑i=0kαe(i)+KD[e(k)?e(k?1)]u(k) = K_P e(k) + K_I \sum_{i=0}^{k} \alpha e(i) + K_D \left[ e(k) - e(k - 1) \right]u(k)=KP?e(k)+KI?i=0∑k?αe(i)+KD?[e(k)?e(k?1)] - 不完全微分PID控制
uD(k)=KD(1?α)[e(k)?e(k?1)]+αuD(k?1)u_D (k) = K_D (1 - \alpha) \left[ e(k) - e(k - 1) \right] + \alpha u_D (k - 1)uD?(k)=KD?(1?α)[e(k)?e(k?1)]+αuD?(k?1)
示例代碼:
class PID:# pid的初始化賦值def __init__(self, Kp, Ki, Kd, setpoint=0, sample_time=0.01):self.Kp = Kpself.Ki = Kiself.Kd = Kdself.setpoint = setpointself.sample_time = sample_timeself.prev_error = 0self.integral = 0# pid的cal_processdef update(self, measured_value):error = self.setpoint - measured_value # 計算誤差self.integral += error * self.sample_time # 積分derivative = (error - self.prev_error) / self. sample_time # 微分output = self.Kp * error + self.Ki * self.integral + self.Kd * derivative # 計算控制輸入self.prev_error = error # 保存誤差return outputpid = PID(Kp=1.0, Ki=0.1, Kd=0.01, setpoint=100)
measured_value = 90 # 假設的當前測量值
control_input = pid.update(measured_value)print(f"Control Input: {control_input}")c語言示例代碼
void pid_init(pid_type_def *pid,uint8_t mode,float max_output,float max_iout,const float PID[3])
{pid->mode=mode;pid->max_output=max_output;pid->max_ioutput=max_iout;pid->Dbuf[0]=pid->Dbuf[1]=pid->Dbuf[2];pid->error[0]=pid->error[1]=pid->error[2]=pid->pout=pid->iout=pid->dout=0.0f;
}float PID_calc(pid_type_def *pid,float ref,float set,float PID[3])
{pid->kp=PID[0];pid->ki=PID[1];pid->kd=PID[2];pid->error[2]=pid->error[1];pid->error[1]=pid->error[0];pid->set=set;pid->cur=ref;pid->error[0]=set-ref;if (pid->mode ==PID_POSITION){pid->pout=pid->kp*pid->error[0];pid->iout+=pid->ki*pid->error[0];pid->Dbuf[2]=pid->Dbuf[1];pid->Dbuf[1]=pid->Dbuf[0];pid->Dbuf[0]=pid->error[0]-pid->error[1];if (pid->iout>pid->max_ioutput){pid->iout=pid->max_ioutput;}else if (pid->iout<-pid->max_ioutput){pid->iout=-pid->max_ioutput;}if (pid->iout*pid->error[0]<0){pid->iout=0;}if (pid->cur>0.707*pid->set || pid->cur<0.707*pid->set){pid->dout=pid->kd*pid->Dbuf[0];}else{pid->dout=0;}pid->output=pid->pout+pid->iout+pid->dout;if (pid->output>pid->max_output){pid->output=pid->max_output;}}else if (pid->mode==PID_DELTA){pid->pout=pid->kp*(pid->error[0]-pid->error[1]);pid->iout=pid->ki*pid->error[0];if (pid->iout>pid->max_ioutput){pid->iout=pid->max_ioutput;} else if (pid->iout<-pid->max_ioutput){pid->iout=-pid->max_ioutput;}if (pid->iout*pid->error[0]<0){pid->iout=0;}pid->Dbuf[2]=pid->Dbuf[1];pid->Dbuf[1]=pid->Dbuf[0];pid->Dbuf[0]=pid->error[0]-2.0f*pid->error[1]+pid->error[2];if (pid->cur>0.707*pid->set || pid->cur<0.707*pid->set){pid->dout=pid->kd*pid->Dbuf[0];}else{pid->dout=0;}pid->output+=pid->pout+pid->iout+pid->dout;if (pid->output>pid->max_output){pid->output=pid->max_output;}}return pid->output;
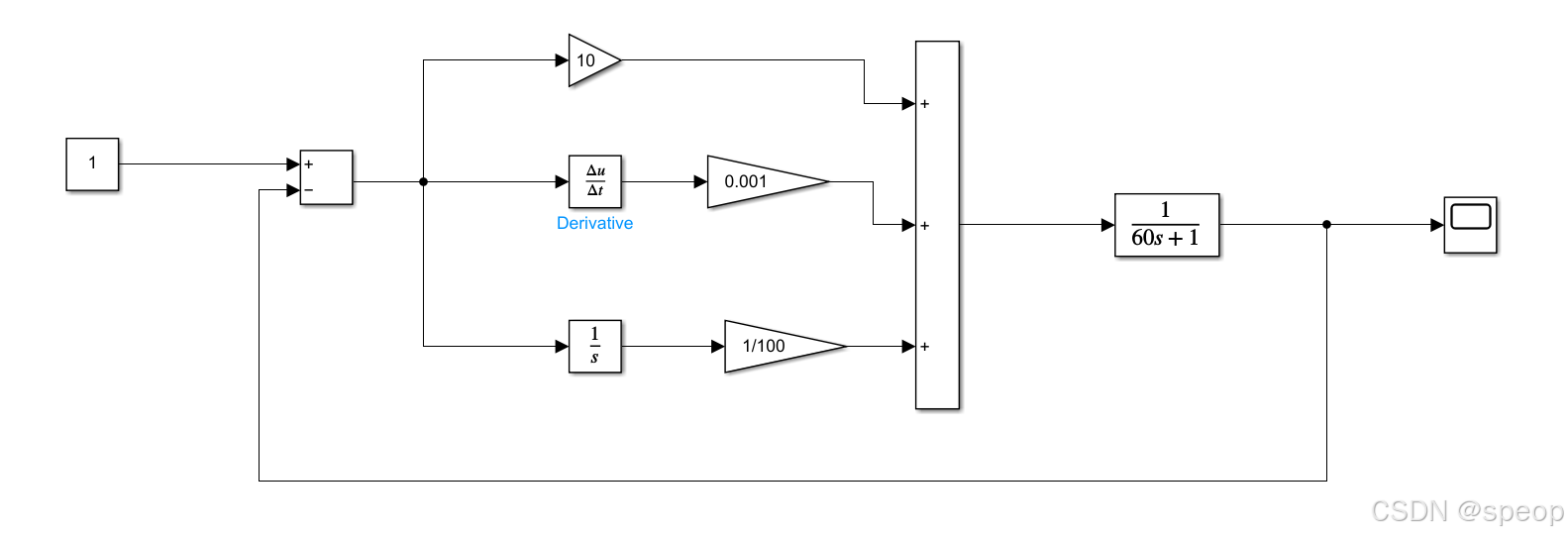
}舉例分析 matlab-simulink
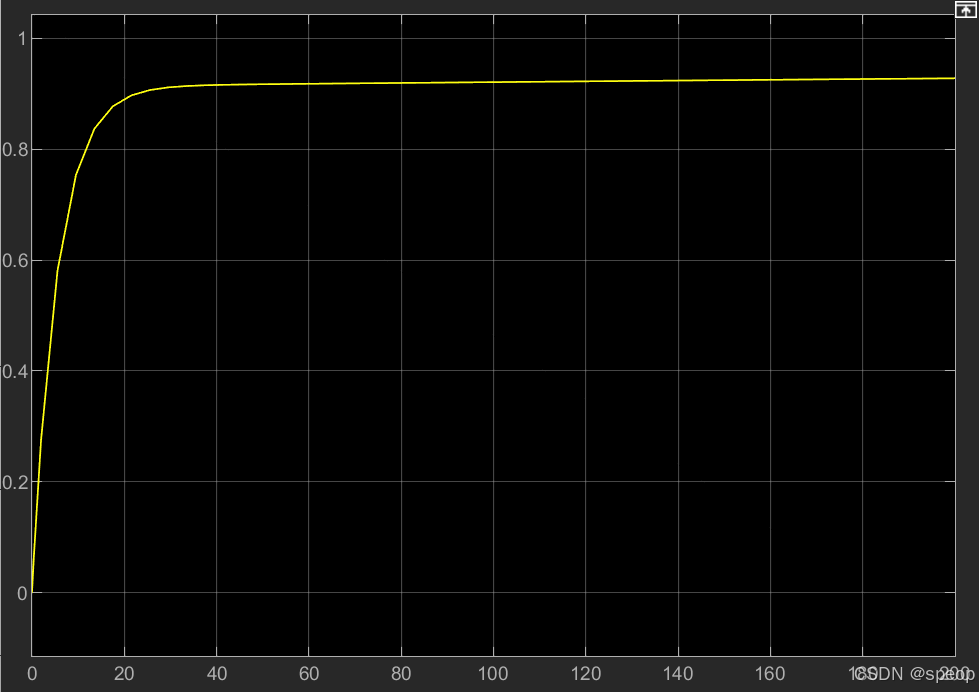
這是當P是10,I是0.001,D是0.01的時候matlab的simulink仿真圖以及他的效果圖,采樣周期T是200.
說明存在穩態誤差,這個時候要增加i,使得不存在穩態誤差
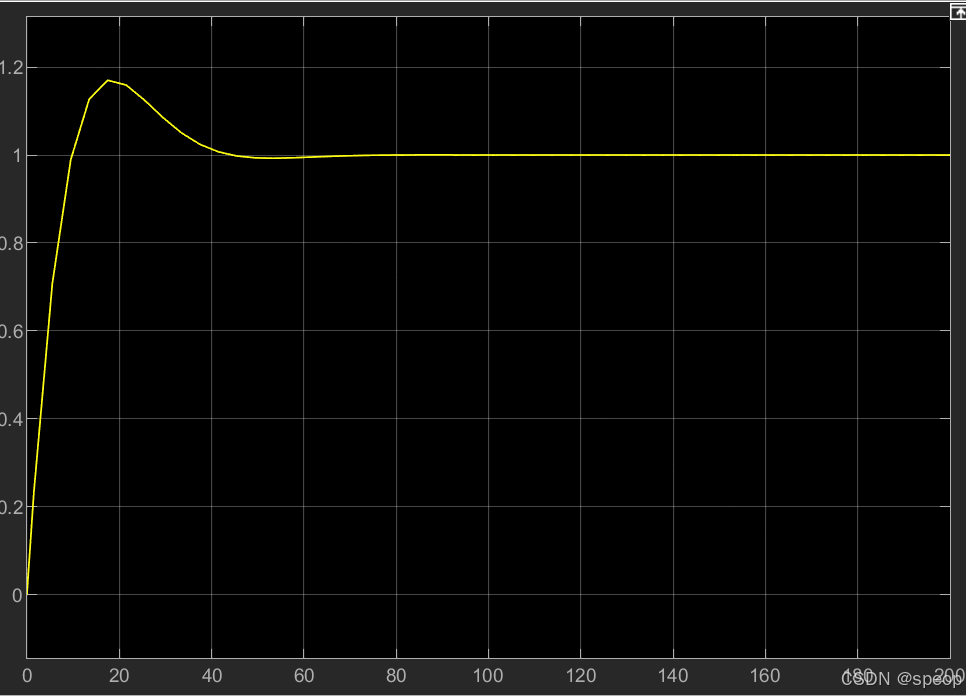
增加I的數值以后,發現超調,準備增加D
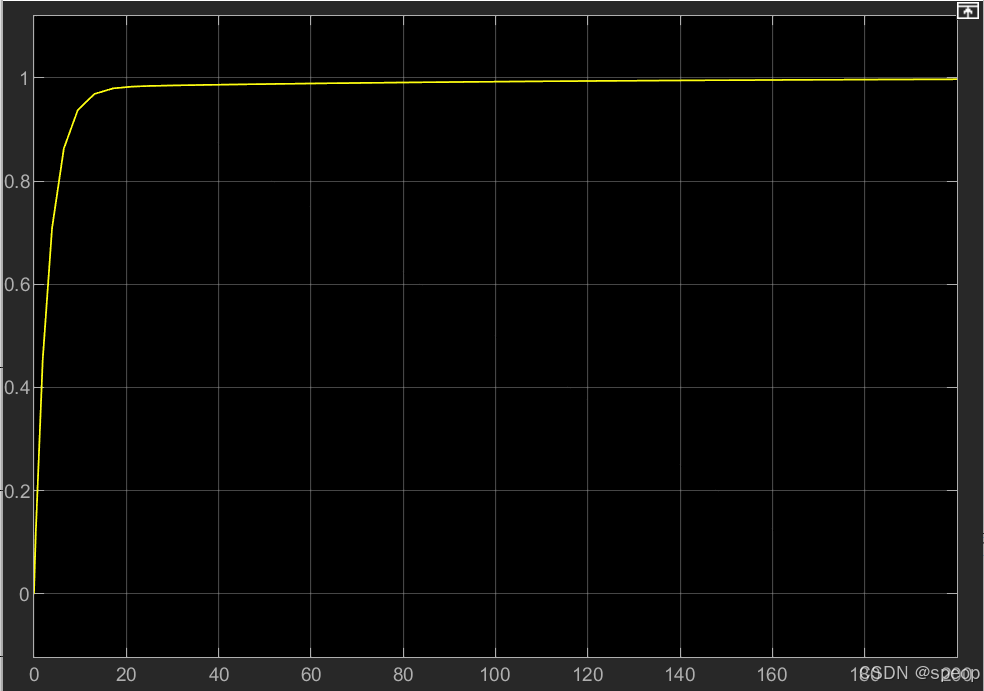
最好的效果如下
優化以及其他情況的PID計算:
參數整定找最佳, 從小到大順序查。先是比例后積分, 最后再把微分加。曲線振蕩很頻繁, 比例度盤要放大。曲線漂浮繞大彎, 比例度盤往小扳。曲線偏離回復慢, 積分時間往下降。曲線波動周期長, 積分時間再加長。曲線振蕩頻率快, 先把微分降下來。動差大來波動慢, 微分時間應加長。理想曲線兩個波, 前高后低四比一。一看二調多分析, 調節質量不會低。






 來獲取調用棧?)


函數)


![[RAG system] 信息檢索器 | BM25 Vector | Pickle格式 | HybridRetriever重排序](http://pic.xiahunao.cn/[RAG system] 信息檢索器 | BM25 Vector | Pickle格式 | HybridRetriever重排序)





 ? | AutoTextEffect(自動打字機))
![[RAG] LLM 交互層 | 適配器模式 | 文檔解析器(`docling`庫, CNN, OCR, OpenCV)](http://pic.xiahunao.cn/[RAG] LLM 交互層 | 適配器模式 | 文檔解析器(`docling`庫, CNN, OCR, OpenCV))