目標檢測作為計算機視覺領域的核心問題之一,其重要性隨著深度學習技術的發展而日益凸顯。本文深入探討了基于深度學習的Faster R-CNN模型,這是一種革命性的目標檢測框架,它通過引入區域提議網絡(Region Proposal Network, RPN)顯著提高了目標檢測的速度和準確性。本文將詳細介紹Faster R-CNN的關鍵技術、實驗步驟以及在標準數據集上的性能表現。
一、背景
目標檢測的發展:近年來,目標檢測技術的進步很大程度上得益于區域提議方法的發展,例如 Selective Search 和基于區域的卷積神經網絡(R-CNN)及其變種 Fast R-CNN。這些方法通過在圖像中生成可能包含目標對象的區域(提議),然后使用 CNN 對這些區域進行分類和邊界框回歸。
計算瓶頸:盡管 Fast R-CNN 通過共享卷積操作顯著提高了檢測速度,但區域提議的生成過程仍然是檢測系統中的一個計算瓶頸。例如,Selective Search 雖然在生成高質量的提議方面表現出色,但其計算成本較高,對于實時目標檢測系統來說速度較慢。
Faster R-CNN 的創新點:Faster R-CNN 引入了區域提議網絡(RPN),這是一個全卷積網絡,能夠與后續的目標檢測網絡共享卷積特征圖。RPN 能夠同時預測每個位置的多個提議區域及其目標分數,從而實現高質量的區域提議生成。
RPN 的優勢:
- 端到端訓練:RPN 可以與 Fast R-CNN 一起端到端地訓練,無需單獨訓練區域提議網絡。
- 特征共享:通過共享卷積特征,減少了計算成本,提高了檢測速度。
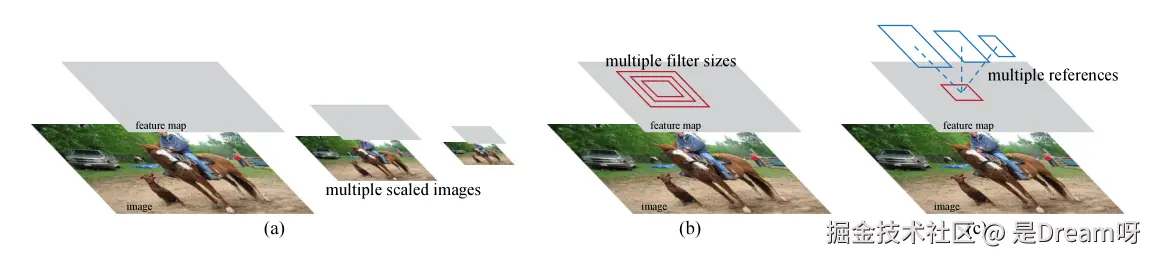
- 多尺度和多寬高比的提議:RPN 使用錨點(anchor boxes)來生成具有不同尺度和寬高比的提議,這使得它可以適應不同大小和形狀的目標。
二、相關工作
目標提議方法
目標提議方法旨在從圖像中生成可能包含目標對象的區域,它們可以顯著減少需要進一步分析的搜索空間:
-
基于超像素分組的方法:例如Selective Search、CPMC通常通過貪心算法合并超像素,基于預設計的低級特征來生成提議區域。
-
基于滑動窗口的方法:例如objectness in windows、EdgeBoxes等。這些方法通過在圖像上滑動不同尺度和寬高比的窗口來快速生成提議區域。
基于深度學習的目標檢測網絡
隨著深度學習技術的發展,研究者們提出了多種基于CNN的目標檢測方法:
-
R-CNN:R-CNN方法通過訓練CNN對提議區域進行分類,并可選地進行邊界框回歸。R-CNN主要作為一個分類器,其準確性依賴于區域提議模塊的性能。
-
OverFeat:OverFeat方法通過訓練一個全連接層來預測單個對象的邊界框坐標,然后將全連接層轉換為卷積層以檢測多類特定對象。
-
MultiBox:MultiBox方法通過在最后一層全連接層同時預測多個類別不可知的邊界框,這些框作為R-CNN的提議。
-
共享卷積特征:包括OverFeat、SPPnet、Fast R-CNN等方法,它們通過共享卷積特征來提高效率和準確性。這些方法展示了共享計算對于高效、準確的視覺識別的重要性。
三、FASTER R-CNN模型分析
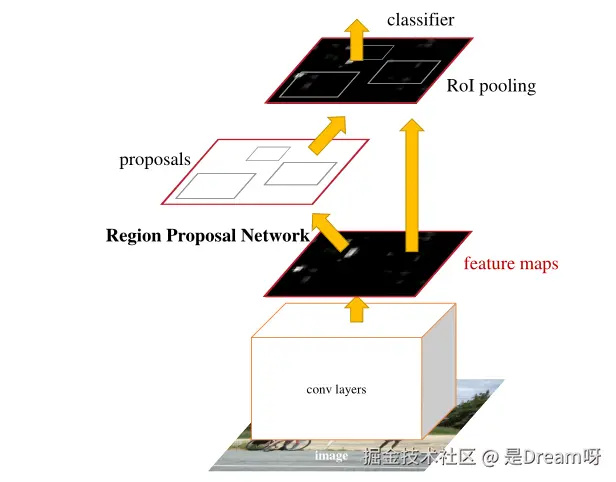
Faster R-CNN 是一種深度學習基礎的目標檢測框架,它通過引入區域提議網絡(Region Proposal Network, RPN)來改進目標檢測的速度和準確性。Faster R-CNN 由兩個主要模塊組成:
- Region Proposal Network (RPN):負責生成目標候選區域。
- Fast R-CNN Detector:使用 RPN 生成的提議區域進行目標的分類和邊界框定位。
算法原理
1.RPN 訓練:RPN 通過在輸入圖像上滑動一個小的網絡來生成區域提議。這個小網絡接受卷積特征圖的 n×n 空間窗口作為輸入,并輸出每個位置的 k個提議區域和相應的目標分數。
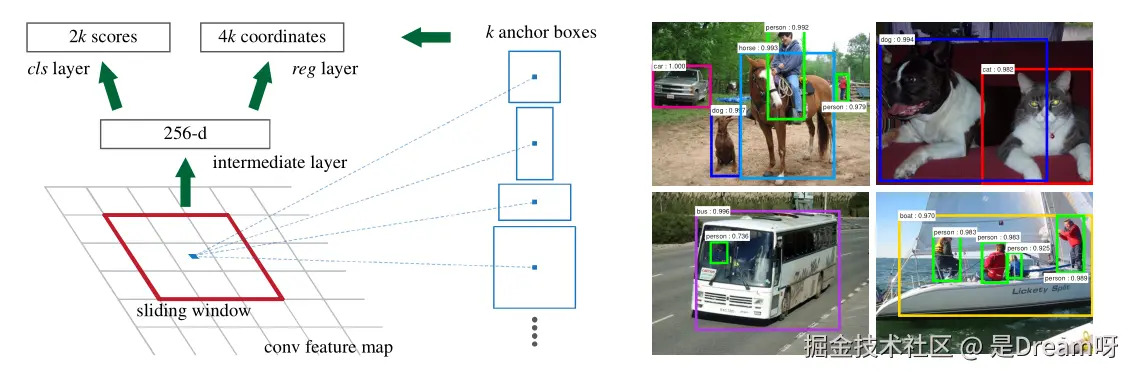
2.錨點 :為了處理多尺度和多寬高比的問題,RPN 使用了“錨點”盒子作為參考,每個錨點都是以滑動窗口的中心為參考點,通過使用不同尺度和寬高比的錨點,RPN 能夠生成覆蓋不同大小和形狀目標的提議區域。錨點簡化了提議生成過程,因為它們作為參照,RPN 只需要預測相對于這些錨點的調整量。
- 默認設置:通常使用 3 個尺度和 3 個寬高比,例如 1282、2562、512^2 像素的面積,以及 1:1、1:2、2:1 的寬高比。
- 位置:在特征圖的每個滑動窗口位置,都會有一組錨點,數量取決于尺度和寬高比的組合。
3.損失函數:Faster R-CNN 中的 RPN 訓練采用了多任務損失函數,這種設計允許網絡同時學習區域提議的分類和定位任務。具體來說,損失函數由兩部分組成:
-
分類損失 :用于評估預測的目標分數與真實標簽之間的差異。它通常采用二分類交叉熵損失,針對每個錨點獨立計算。
-
邊界框回歸損失 :這部分損失用于評估預測的邊界框坐標與真實標注框之間的差異。它通常采用平滑 L1 損失,也稱為 Huber 損失。
4.共享特征:RPN 和 Fast R-CNN 通過共享卷積層來訓練,這意味著它們在特征提取階段使用相同的網絡參數。 由于共享了卷積層,測試時生成區域提議的計算成本變得很低,因為特征圖只需要計算一次,然后可以被兩個網絡模塊重用,有助于提高最終檢測結果的準確性。
5.交替訓練:RPN 和 Fast R-CNN 通過交替優化的方式共享特征,先分別訓練,然后共享特征層進行微調。
- 獨立訓練 RPN:首先,使用 ImageNet 預訓練模型初始化網絡參數,然后獨立訓練 RPN,優化區域提議的生成。
- 訓練 Fast R-CNN:使用 RPN 生成的提議區域來訓練 Fast R-CNN,進行目標檢測任務。
- 共享特征層訓練:固定 Fast R-CNN 的檢測頭部分,使用檢測網絡來初始化 RPN,并共享卷積層,對 RPN 進行微調。
- 微調 Fast R-CNN:最后保持共享的卷積層不變,對 Fast R-CNN 的檢測頭部分進行微調,以優化最終的檢測性能。
四、實驗部分
1.實驗步驟
數據集使用PASCAL VOC 2007, 2012 和 MS COCO 數據集。PASCAL VOC:包含 20 個類別,分為訓練集、驗證集和測試集。MS COCO:包含 80 個類別,數據集更大,更復雜,用于進一步評估模型的泛化能力。
預訓練:使用ImageNet預訓練模型,這些模型已經在圖像分類任務上訓練,具有很好的特征提取能力。
RPN 訓練:首先獨立訓練 RPN,使用隨機梯度下降(SGD)進行端到端的訓練。
Fast R-CNN 訓練:使用RPN生成的提議區域來訓練Fast R-CNN,進行目標的分類和定位。
特征共享訓練:通過交替訓練實現RPN和Fast R-CNN之間的特征共享,提高檢測效率,先固定共享的卷積層訓練 RPN,然后微調 Fast R-CNN 的獨特層。
測試:使用非極大值抑制(NMS)去除重疊的提議區域,減少冗余。 根據篩選后的提議區域運行Fast R-CNN檢測器,進行最終的目標分類和定位。
2.實驗結果
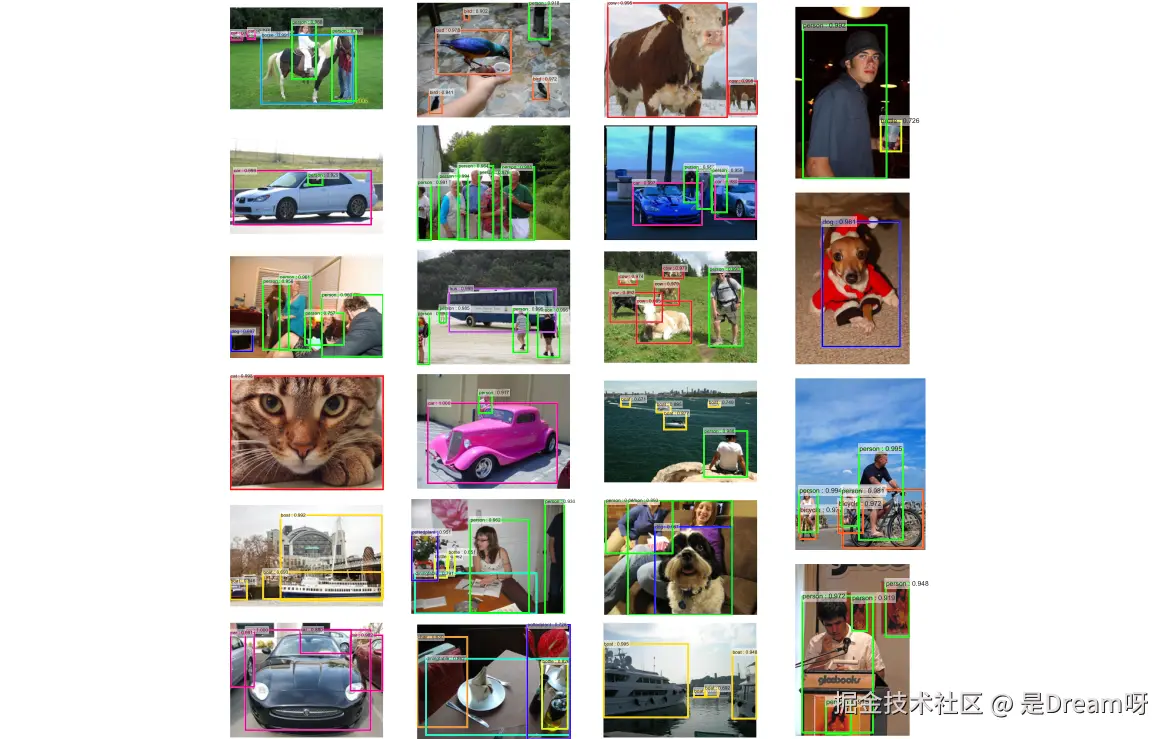
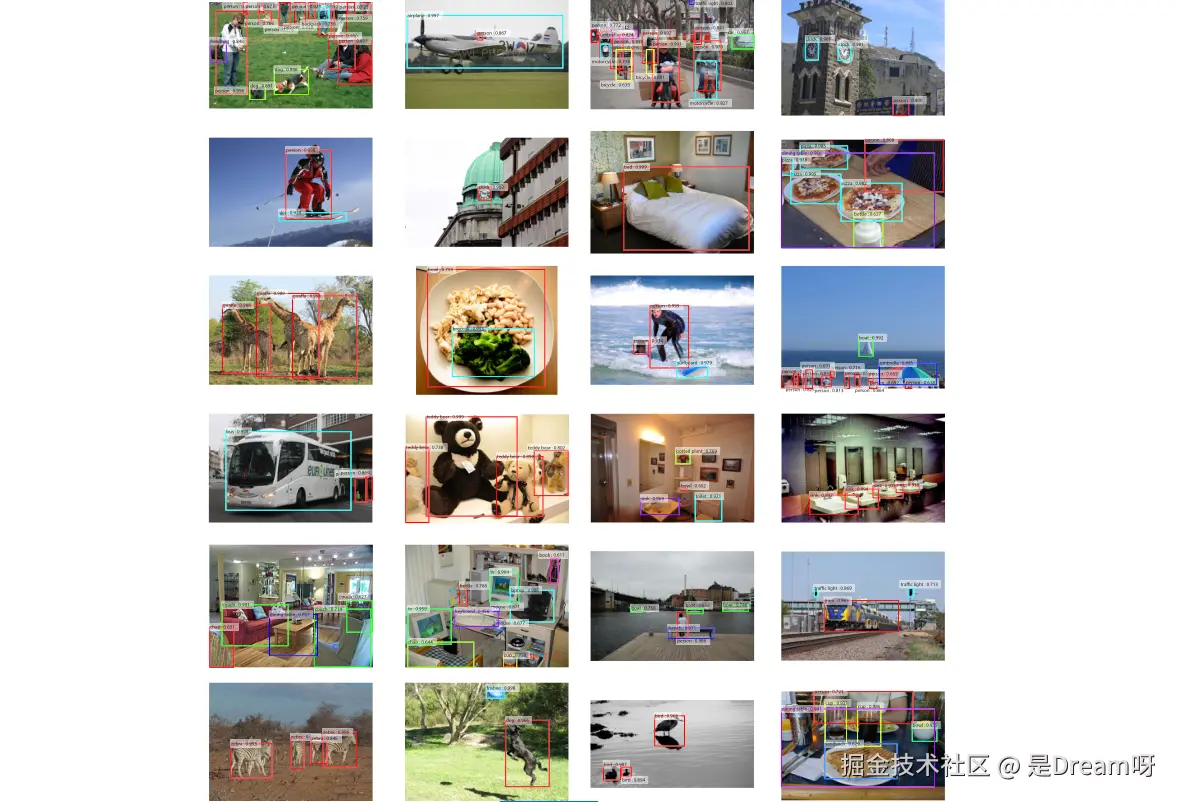
PASCAL VOC:Faster R-CNN- 在 PASCAL VOC 數據集上,Faster R-CNN 實現了 73.2% 的 mAP,展示了其在標準數據集上的卓越性能:

使用Faster R-CNN系統的PASCAL VOC 2007測試集上的目標檢測結果,這種方法可以檢測各種尺度和縱橫比的物體。每個輸出框都與一個類別標簽和[0,1]中的softmax分數相關聯,使用分數閾值0.6來顯示這些圖像,獲得這些結果的運行時間為每張圖像198ms:
MS COCO:在更復雜的 MS COCO 數據集上,Faster R-CNN 達到了 42.1% 的 mAP@0.5 和 21.5% 的 mAP@[.5, .95]。

使用Faster R-CNN系統在MS COCO測試開發集上的目標檢測結果,模型為VGG-16,訓練數據為COCO訓練集(42.7% mAP@0.5),每個輸出框都與一個類別標簽和[0,1]中的softmax分數相關聯。使用分數閾值0.6來顯示這些圖像。對于每張圖像,一種顏色表示該圖像中的一個對象類別:
代碼復現
Faster R-CNN 的模型結構相對復雜,涉及多個組件,包括區域提議網絡(RPN)和 Fast R-CNN 檢測器,下面是用于說明 Faster R-CNN 結構的概念性代碼,可以根據需要補充組件進行使用:
import torch
import torch.nn as nn
import torchvision.models as modelsclass RegionProposalNetwork(nn.Module):def __init__(self, feature_map_size, anchor_sizes, anchor_ratios):super(RegionProposalNetwork, self).__init__()# 卷積層,用于提取特征self.conv1 = nn.Conv2d(in_channels, out_channels, kernel_size, stride, padding)# 用于分類的全連接層self.cls_score = nn.Linear(fc_size, 2 * num_anchors)# 用于回歸的全連接層self.bbox_pred = nn.Linear(fc_size, 4 * num_anchors)def forward(self, x):# 提取特征h = self.conv1(x)# 分類得分cls_score = self.cls_score(h)# 邊界框預測bbox_pred = self.bbox_pred(h)return cls_score, bbox_predclass FastRCNN(nn.Module):def __init__(self, num_classes):super(FastRCNN, self).__init__()# 預訓練的CNN模型,如VGG16self.vgg = models.vgg16(pretrained=True)# RoI池化層self.roi_pool = RoIPooling(output_size)# 檢測頭網絡self.detection_head = nn.Sequential(nn.Linear(vgg.fc.in_features, fc_size),nn.ReLU(),nn.Linear(fc_size, num_classes + 1), # +1 for backgroundnn.Sigmoid() # For classification)# 邊界框回歸層self.bbox_reg = nn.Linear(vgg.fc.in_features, 4 * (num_classes + 1))def forward(self, x, rois):# 提取RoI特征pool = self.roi_pool(x, rois)# 檢測頭前饋cls_score = self.detection_head(pool)# 邊界框回歸bbox_pred = self.bbox_reg(pool)return cls_score, bbox_predclass FasterRCNN(nn.Module):def __init__(self, num_classes, feature_map_size, anchor_sizes, anchor_ratios):super(FasterRCNN, self).__init__()self.rpn = RegionProposalNetwork(feature_map_size, anchor_sizes, anchor_ratios)self.fast_rcnn = FastRCNN(num_classes)def forward(self, images, targets=None):# 預訓練CNN特征提取features = self.fast_rcnn.vgg(images)# RPN前向傳播cls_score, bbox_pred = self.rpn(features)# 如果是訓練模式,計算損失并返回if self.training and targets is not None:# 計算RPN損失rpn_loss_cls, rpn_loss_bbox = compute_rpn_loss(cls_score, bbox_pred, targets)return rpn_loss_cls, rpn_loss_bbox# 通過RPN獲取提議proposals = generate_proposals(cls_score, bbox_pred)# 使用NMS過濾提議det_boxes, det_probs = nms(proposals)# 如果是測試模式,運行Fast R-CNN檢測器if not self.training:# RoI池化pool = self.fast_rcnn.roi_pool(features, det_boxes)# Fast R-CNN前向傳播cls_score, bbox_pred = self.fast_rcnn(pool)return cls_score, bbox_pred
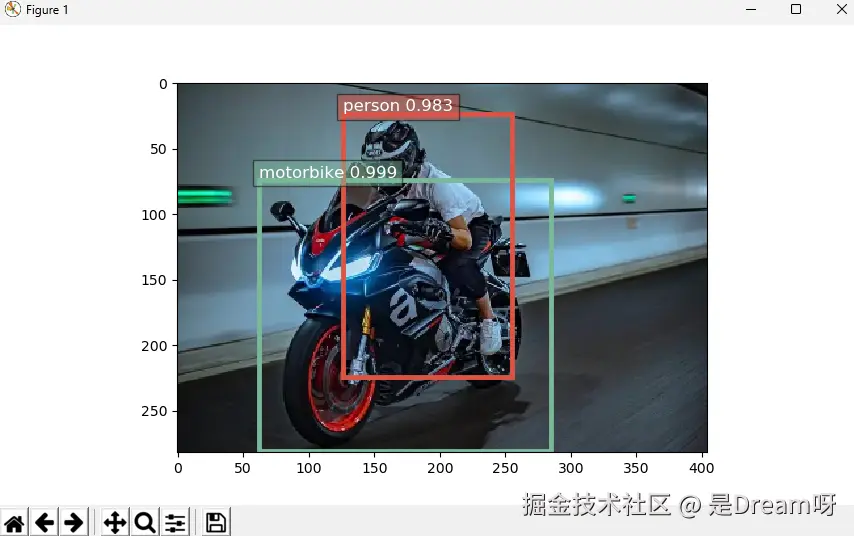
通過運行demo。可以看到非常精準的錨框著對象,而且摩托車的識別率達到了99.9%:

通過本文的分析,我們可以看到Faster R-CNN在目標檢測領域的卓越性能,無論是在PASCAL VOC還是MS COCO數據集上,它都展現出了極高的mAP值,證明了其強大的泛化能力和準確性。Faster R-CNN的成功不僅在于其創新性的技術設計,更在于其對深度學習在計算機視覺任務中應用的深遠影響。隨著技術的不斷進步,我們可以期待Faster R-CNN及其衍生模型在未來的應用中將發揮更大的作用,推動目標檢測技術向更高層次發展。


)

 vs. 張量維度(深度學習):線性代數與深度學習的基石辨析,再也不會被矩陣階數給混淆了)
:Windows 與 Linux 系統中的日志與文件痕跡清理)













)